Разработка рекомендаций по внедрению в Российской Федерации навигации, основанной на характеристиках при полетах в районе аэродрома
Введение
Деятельность гражданской авиации не может быть эффективной
без эффективной деятельности системы организации воздушного движения, которая
призвана обеспечивать безопасное, экономичное, регулярное воздушное движение и
другую деятельность по использованию воздушного пространства в интересах
граждан, экономики, обороны и безопасности государства.
Однако в настоящее время Единая система организации
воздушного движения Российской Федерации существенно отстала в своем развитии,
как от уровня аналогичных систем сопредельных государств, так и от уровня
государств Западной Европы, США и Канады. По этой причине в настоящее время
невозможна интеграция национальной системы ОрВД в мировую, что, безусловно,
ограничивает ее использование в интересах мирового воздушного транспорта и
отрицательно влияет на экономические показатели её деятельности.
Состояние ОрВД заботит не только авиационные круги России, но
также и мировое авиационное сообщество. Это определяется особым географическим
положением страны, через территорию которой проходит целый ряд выгодных
транзитных маршрутов. Экономия времени полета по этим маршрутам
может достигать нескольких часов. Развитие Единой системы должно отвечать не
только внутренним потребностям страны, но и международным, и эволюционно, через
гармонизацию с зарубежными системами, перейти к интеграции в мировую. Для этого
системе ОрВД необходимо соответствовать требованиям пользователей ее услуг и
незамедлительно применять методы глобального аэронавигационного планирования
развития национальной системы ОрВД. Одним из ключевых элементов глобальной
стратегии по внедрению систем связи, навигации, наблюдения / организации
воздушного движения (CNS/ATM) ИКАО определяет новую концепцию навигации на
основе характеристик (PBN).
По словам президента совета ИКАО Роберто Кобе Гонсалеса, PBN
позволит снизить загруженность аэропортов и воздушного пространства, сократить
расход топлива и защитить окружающую среду от воздействия авиации, снизить
уровень шума в зоне аэропортов и обеспечить надежную эксплуатацию воздушных
судов в любых погодных условиях. Она также придаст бóльшую гибкость эксплуатантам и повысит безопасность и
эффективность полетов. [8]
Многие страны мира, такие как США, Австралия уже успешно
внедрили новую концепцию и отмечают её значительное преимущество. В России пока
данный процесс находится на начальной стадии. Особенно важно в этом процессе
уделить внимание совершенствованию концепции воздушного пространства в районе
аэродрома.
Маневрирование в районе аэродрома является наиболее сложным этапом
полета, требующим особенно точного выдерживания заданной траектории, в целях
обеспечения безопасности и высокой пропускной способности. Целесообразно
продолжить модернизацию отечественной системы ОрВД постепенным внедрением
полетов на этапах прибытия, вылета и захода на посадку с использованием
навигации основанной на характеристиках, особенно учитывая тот факт, что
интенсивность полетов в воздушном пространстве Российской Федерации по ряду
оценок значительно возрастет на протяжении следующих лет.
Целью данной дипломной работы является разработка предложений
и рекомендаций по внедрению в Российской Федерации навигации, основанной на
характеристиках при полетах в районе аэродрома. Рекомендации основаны на
анализе концепции PBN, инфраструктуры навигационных средств зональной навигации,
особенностей RNAV в районе аэродрома, состояния и потребностей воздушного
пространства Российской Федерации.
1. Описание навигации, основанной на характеристиках
1.1 Переход к концепции PBN
В 80-х годах мировое авиационное сообщество
столкнулось с серьезными проблемами. В связи с увеличением спроса на воздушные
перевозки, страны были вынуждены найти решения, как безопасно повысить
пропускную способность воздушного пространства, эффективность полетов, и
обеспечить легкий доступ, например, к аэродромам со сложным рельефом. Эти
проблемы в основном были связаны с использованием традиционного метода
навигации по маршрутам проходящих через наземные радиотехнических средствах,
таких как VOR, NDB, ограниченных по дальности действия,
точности и функциональным возможностям, что в свою очередь препятствовало
возможности свободного построения маршрутов и аэродромных схем. Таким образом,
стала обсуждаться возможность полетов по произвольным траекториям, не
обязательно проходящим через радиомаяки. Вслед за традиционным способом
навигации следующим шагом стала зональная навигация (RNAV, Area Navigation) -
навигация с использованием технических средств, обеспечивающих наведение при
полете по любой желаемой траектории. Оборудование, обеспечивающее возможность
такой навигации, стали называть «оборудованием зональной навигации» или
«оборудованием RNAV». Оно должно автоматически определять местоположение ВС по
одному или нескольким навигационным датчикам и вычислять расстояние вдоль линии
пути, боковое отклонение, время полета до выбранного пункта, а также обеспечить
непрерывную индикацию отклонения на приборе типа ПНП или КПП, то есть
обеспечить собственно наведение. Сама же траектория задается, как правило,
геодезическими координатами (широтой и долготой) нескольких ее точек,
называемых точками пути (waypoints). [4]
Эволюция RNAV стала возможной по мере появления спутниковых
средств навигации на основе навигационных сигналов систем GNSS, а также
усовершенствования бортовых инерциальных средств навигации. Зональная навигация
позволяет осуществлять полеты по точкам на трассе, не привязанным к наземным
радионавигационным средствам, что значительно повышает гибкость дизайна
воздушных трасс.
Траектория планируемого полета может быть задана не только в
горизонтальной плоскости в виде маршрута, но и в вертикальной путем задания
высот пролета точек пути, углов или градиентов наклона траектории. В
соответствии с размерностью (Dimension) «пространства», в котором
осуществляется наведение, зональную навигацию разделяют на три вида:
D RNAV - двухмерная RNAV в горизонтальной плоскости LNAV
(Lateral Navigation).
D RNAV - трехмерная RNAV в горизонтальной и вертикальной
плоскостях. Для навигации в вертикальной плоскости используется аббревиатура
VNAV (Vertical Navigation);
D RNAV - четырехмерная RNAV в горизонтальной и вертикальной
плоскостях плюс решение задачи регулирования скорости полета для прохождения
пунктов маршрута или прибытия на аэродром в заданное время. Зональная навигация
по времени сокращенно обозначается TNAV (буква Т от слова Time).
[4]
С добавлением к RNAV функциональной возможности мониторинга,
что получило название RNP (Required navigation performance), стала возможной еще
большая оптимизация использования воздушного пространства. Мониторинг эксплуатационных
характеристик и выдача предупреждений на борту ВС указывают на «нахождение ВС в
пределах» относительно минимальных требований к техническим характеристикам
аэронавигационных систем (MASPS, Minimum Aviation System Performance Standards), а также положений
Приложения 11 к конвенции о международной гражданской авиации или PANSOPS. Мониторинг
эксплуатационных характеристик и выдача предупреждений на борту ВС позволяют
летному экипажу определять, когда система RNP не достигает требуемых от нее
эксплуатационных характеристик.
Необходимость применения зональной навигации на основе
RNAV/RNP диктуется растущей потребностью в решениях проблемы насыщения
воздушного пространства, требованием к повышению топливной эффективности,
усиливающимися требованиями к защите окружающей среды, растущей потребностью в
заходах на посадку на основе RNAV (безопасность полетов, доступность
аэропортов). Эти требования могут быть выполнены с помощью RNAV/RNP, однако для
этого необходимо обеспечить стандартизацию и установить эксплуатационные
требования.
Именно с этой целью специальный комитет по будущим
аэронавигационным системам ИКАО (FANS) определил потребность в навигации на
основе эксплуатационных характеристик и разработал концепцию способности к
производству полетов на основе Требуемых навигационных характеристик (RNP).
Было разработано Руководство по требуемым навигационным
характеристикам (Док. 9613), которое изначально охватывало исключительно
маршрутный этап полета в океаническом воздушном пространстве и удаленных районах
континентального воздушного пространства, при этом не содержало требований RNP
ИКАО для применения на маршрутном этапе полета в континентальном ВП и в зонах
аэродрома. Отсутствие единого и всеобъемлющего руководства ИКАО привело к
распространению различных национальных стандартов, широкому разнообразию как
функциональных требований, так и требуемых навигационных датчиков, а также к
различиям в требованиях к экипажам, различиям в отраслевой концепции RNP
(мониторинг эксплуатационных характеристик и выдача предупреждений на борту ВС)
и полному отсутствию глобальной гармонизации.
Стало ясно, что концепция требует корректировки для гарантии
четкого разграничения между полетами, требующими мониторинга эксплуатационных
характеристик и выдачи предупреждений на борту ВС, и полетами, не требующими
мониторинга и выдачи предупреждений, всеобщей гармонизации текущих полетов на
основе RNAV и RNP, разработки новых навигационных технических требований в
целях удовлетворения эксплуатационных потребностей, а также формулировки четких
требований к эксплуатации и руководящих указаниях по внедрению.
С этой целью была создана специальная исследовательская
группа по эксплуатационным требованиям RNP, которая разработала концепцию навигации
на основе характеристик (PBN, Performance based navigation), охватывающую применение
зональной навигации на основе эксплуатационных требованиях к воздушному судну,
выраженных в навигационных технических требованиях.
Концепция была включена в Руководство по навигации на основе
характеристик (Performance-Based Navigation Manual) ИКАО (Doc 9613), которое заменило
Руководство по требуемым навигационным характеристикам. Новый документ должен
обеспечить государствам «единый источник информации» о том, как внедрять RNAV и
RNP в своем воздушном пространстве.
Концепция PBN представляет собой переход от навигации,
основанной на датчиках, к навигации, основанной на характеристиках. Требования
к характеристикам указываются в навигационных спецификациях, в которых также
определяется, какие навигационные датчики и оборудование можно использовать для
соблюдения этих требований к характеристикам. Эти навигационные спецификации
излагаются достаточно подробно, с тем, чтобы обеспечить согласованность
действий на глобальном уровне путем предоставления государствам и эксплуатантам
конкретного инструктивного материала относительно реализации. При использовании
PBN общие навигационные требования определяются на основании эксплуатационных
требований. Эксплуатанты затем рассматривают различные варианты с учетом
имеющихся технических средств и навигационного обслуживания, которые позволили
бы обеспечить соблюдение данных требований.
Таким образом, у эксплуатанта имеется возможность выбрать
более рентабельный вариант, а не решение, которое предписывается в качестве
составной части эксплуатационных требований. Техника со временем
совершенствуется, однако при этом нет необходимости пересматривать как таковой
эксплуатационный процесс, до тех пор пока система RNAV обеспечивает ожидаемый
уровень характеристик. [1]
Навигация на основе характеристик является составной и очень
важной частью концепции CNS/ATM (Communication,
Navigation and Surveillance/Air Traffic Management) - системы связи, навигации,
наблюдения и организации воздушного движения, разработанной ИКАО в конце 80-х
годов. По масштабу производимых изменений переход к системам CNS/ATM является,
пожалуй, самой крупной и дорогой программой в истории гражданской авиации.
Основная цель концепции CNS/ATM - удовлетворение возрастающих потребностей
авиационного сообщества в эффективном использовании воздушного пространства.
Своим возникновением концепция CNS/ATM во многом обязана появлению спутниковых
систем навигации и связи. Космические аппараты вместе с наземными средствами
составят в будущем исчерпывающую систему связи и навигации. Система CNS/ATM
предоставит практически неограниченные возможности летать по оптимальным
маршрутам, экономить топливо, увеличивать пропускную способность воздушного
пространства и обеспечивать высокую безопасность полетов.
В ходе 36-й Ассамблеи ИКАО, представителями
государств была единогласно принята Резолюция А36/23, которая призывает все
государства - члены Организации к внедрению стандартов RNAV и RNP при
выполнении полетов на маршруте и в зоне аэропорта и схем захода на посадку с
вертикальным наведением в соответствии с инструктивными материалами Руководства
по навигации на основе характеристик ИКАО (Doc 9613).
апреля 2009 г. ИКАО, ее
государства-члены и партнеры по отрасли, участвуя в Международной рабочей
группе внедрения PBN, подписали новую декларацию, в которой содержится призыв к
активизации усилий по внедрению PBN.
В дополнение к рабочим группам по внедрению PBN, которые
созданы во всех региональных бюро ИКАО, были сформированы отдельные рабочие
органы и группы для осуществления надзора за различными аспектами деятельности,
связанной с внедрением PBN.является одним из ключевых инструментов реализации
инициатив NextGen (Система организации воздушного движения нового поколения)
FAA и европейской SESAR (Исследовательская программа по усовершенствованию
системы ОрВД «Единое европейское небо»), которые являются наиболее известными
примерами внедрения будущей глобальной концепции ОрВД ИКАО на региональном
уровне.
Практика показывает, что внедрение PBN дает следующие
преимущества:
. Повышение безопасности полетов в воздушном пространстве
путем внедрения схем непрерывного и стабилизированного снижения с вертикальным
наведением.
. Сокращение времени полета благодаря внедрению оптимальных
траекторий полета с соответствующим снижением расхода топлива, уровня шума и
вредных выбросов в атмосферу.
. Использование существующих возможностей воздушных судов при
полетах по правилам RNAV и / или RNP.
. Возможность входа в зону аэропорта и воздушное пространство
по усовершенствованным схемам в любых погодных условиях; возможность
безопасного пролета препятствий и соблюдения экологических норм путем
использования оптимизированных траекторий полета по RNAV или RNP.
. Внедрение более точных траекторий захода на посадку, вылета
и прибытия в целях упорядочить и разредить потоки воздушного движения.
. Минимизация задержек в воздушном пространстве и зонах
аэропортов с высокой интенсивностью воздушного движения путем внедрения
дополнительных параллельных маршрутов и пунктов вылета и прибытия в зонах
аэропорта.
. Сокращение интервалов между воздушными судами при
горизонтальном и вертикальном эшелонировании для увеличения пропускной
способности воздушного пространства.
. Снижение нагрузки на диспетчеров УВД и летные экипажи
благодаря применению схем RNAV/RNP и возможностей бортового оборудования.
. Сокращение объема радиосвязи между экипажами и диспетчерами
УВД и радиолокационного наведения.
. Повышение предсказуемости траектории полета.
[8]
1.2 Концепция воздушного пространства
Концепцию воздушного пространства можно рассматривать как
общее видение или генеральный план конкретного воздушного пространства.
Основываясь на конкретных принципах, концепция воздушного пространства
направлена на достижение конкретных целей. Стратегические цели являются
движущим фактором, определяющим общее видение концепции воздушного
пространства. Как правило, эти цели определяются пользователями воздушного
пространства, организацией воздушного движения (ОрВД), аэропортами, а также
политикой в области окружающей среды и государственной политикой. Функцией
концепции воздушного пространства и концепции полетов и является соблюдение
этих требований. Стратегическими целями, которые в большинстве случаев являются
определяющими факторами концепции воздушного пространства, являются
безопасность полетов, пропускная способность, эффективность, доступ и
окружающая среда. (рис. 1)

Рис. 1. Стратегические цели применительно к концепции
воздушного пространства
Для удовлетворения потребностей концепции воздушного
пространства требуется определить навигационные функциональные требовании в
рамках контекста навигации, основанной на характеристиках.
Эти требования формализованы в навигационной спецификации, которая, наряду с
инфраструктурой навигационных средств, обеспечивает конкретный навигационный
прикладной процесс. В качестве составной части концепции воздушного
пространства, навигационные прикладные процессы также имеют отношение к связи,
наблюдению ОВД, ОрВД, средствам УВД и производству полетов. Концепция
воздушного пространства объединяет все эти элементы вместе в одно единое целое.
Определяется роль, которую будет играть каждый инструмент реализации в общей
концепции. Ни один «инструмент реализации» не может быть разработан
изолировано. PBN является одним из нескольких инструментов реализации концепции
воздушного пространства наряду со связью, наблюдением и ОрВД. Это показано на
рис. 2.
Рис. 2. Взаимосвязь навигации, основанной на характеристиках
и концепции воздушного пространства
Концепция навигации, основанной на характеристиках (PBN),
базируется на использовании системы зональной навигации.
Применение PBN основывается на двух главных исходных
компонентах:
1) инфраструктуре навигационных средств. Под
инфраструктурой навигационных средств понимаются наземные или спутниковые
навигационные средства. Наземные навигационные средства включают DME и VOR.
Спутниковые навигационные средства включают элементы GNSS.
) навигационной спецификации. Навигационная
спецификация используется государством в качестве основы для разработки
материала для утверждения летной годности и эксплуатации. В навигационной
спецификации детализируются: требуемые от системы RNAV характеристики в виде
точности, целостности, эксплуатационной готовности и непрерывности; какими
навигационными функциональными возможностями система RNAV должна обладать;
какие навигационные датчики должны быть интегрированы в систему RNAV, а также
какие требования предъявлять к летному экипажу. Навигационной спецификацией
является либо спецификация RNP, либо спецификация RNAV. Спецификация RNP
включает требование к автономному контролю на борту за выдерживанием
характеристик и выдаче предупреждений, в то время как в спецификации RNAV такое
требование отсутствует.
Точность навигации характеризуется величиной погрешности
выдерживания заданной траектории, которая называется общей погрешностью системы
(TSE, Total System Error). Погрешности
рассматриваются отдельно по боковой и продольной координатам. По боковой
координате, то есть в направлении, перпендикулярном ЛЗП, TSE представляет собой
расстояние между фактическим местоположением ВС и линией заданного пути в
навигационной системе. Она включает в себя следующие составляющие: погрешность
определения траектории (PDE), погрешность техники пилотирования (FTE) и
погрешность навигационной системы (NSE), как это показано на рис. 3.
1) PDE имеет место, когда определенная системой RNAV
траектория не совпадает с желаемой траекторией, т.е. с траекторией, по которой
должен выполняться полет над землей.
) FTE относится к способности летного экипажа или автопилота
следовать по определенной траектории или линии пути, включая любые погрешности
индикации (например, погрешность центрирования индикатора отклонения от курса
(CDI)).
) NSE представляет собой разницу между расчетным и
фактическим местоположением воздушного судна.
Предполагается, что распределение этих погрешностей является
гауссовым, вследствие чего распределение суммарной погрешности системы (TSE) является также
гауссовым.

Рис. 3. Погрешности боковой навигации (95%)
По продольной координате (вдоль ЛЗП) TSE представляет собой
разность между отображенным на индикаторе расстоянием ВС до точки-пути и
фактическим расстоянием до этой точки. Продольные характеристики подразумевают
навигацию по отношению местоположения вдоль линии пути (например, управление
4-D). Однако в настоящее время навигационные спецификации, требующие управления
4-D, отсутствуют и в продольном измерении FTE не существует. Текущие
навигационные спецификации определяют требования в отношении точности
продольного выдерживания линии пути, которое включает NSE и PDE. Считается, что
PDE можно пренебречь.
Требования к точности спецификаций RNAV и RNP определены для
бокового и продольного измерений. Требования спецификаций RNP к контролю на
борту за выдерживанием характеристик и выдаче предупреждений определяются для
бокового измерения в целях оценки соблюдения характеристик воздушным судном.
Однако NSE считается радиальной погрешностью, и таким образом контроль на борту
за выдерживанием характеристик и выдача предупреждений обеспечивается во всех
направлениях. Предполагается, что полная и соответствующая 95% погрешность RNP
распределена в пределах круга с радиусом, равным величине RNP.
Целостность характеризует способность системы выдавать
пользователю своевременное предупреждение в тех случаях, когда эта система не
может обеспечить точность, требуемую в данном регионе или на данном этапе
полета.
Эксплуатационная готовность - показатель способности
системы обеспечивать надлежащее обслуживание в пределах установленной зоны
действия. Определяется в виде интервала времени, в течение которого система
должна использоваться для навигации.
Непрерывность - это способность системы удовлетворять
требованиям целостности удерживания без непредусмотренных перерывов. Под такими
«непредусмотренными перерывами» понимается одна из следующих ситуаций:
- полная потеря системой навигационной
способности (ее отказ);
- частичная потеря навигационной
способности, при которой система ее выявила и информирует летный экипаж, что
она не может обеспечить выполнение требований RNP RNAV;
- ложное информирование летного экипажа о
неспособности системы обеспечить выполнение требований RNP RNAV.
Как спецификации RNAV, так и спецификации RNP включают требования
в отношении определенных навигационных функциональных возможностей. На
базовом уровне эти функциональные требования могут включать:
- постоянную индикацию местоположения
воздушного судна относительно линии пути, которая должна отображаться пилоту на
навигационном индикаторе, расположенном в его основном поле зрения;
- индикацию расстояния и пеленга до активной
точки пути;
- индикацию путевой скорости и времени до
активной точки пути;
- функцию хранения навигационных данных;
- соответствующую индикацию отказа системы
RNAV, включая датчики.
Более усложненные навигационные спецификации включают
требование в отношении навигационных баз данных, а также в отношении
возможности выполнения процедур базы данных.
Контроль на борту за выдерживанием характеристик и выдача
предупреждений является
основным элементом, который определяет, отвечает ли навигационная система
необходимому уровню безопасности, соответствующему данному применению RNP; это
относится как к боковым, так и продольным навигационным характеристикам, а
также позволяет летному экипажу обнаружить, что навигационная система не
обеспечивает или не может гарантировать с целостностью 
 навигационные характеристики, требуемые для данного полета (рис.
4).
навигационные характеристики, требуемые для данного полета (рис.
4).
Системы RNP позволяют повысить целостность операций; это
может позволить сократить разделение маршрутов и обеспечить достаточную
целостность для использования в конкретном воздушном пространстве для навигации
только систем RNAV. Таким образом, применение систем RNP может дать
значительные преимущества в области безопасности полетов, эксплуатации и
эффективности.
Для полетов в океаническом, удаленном воздушном пространстве,
по маршруту и в районе аэродрома спецификация RNP обозначается RNP X, например
RNP 4. Спецификация RNAV обозначается RNAV X, например RNAV 1. Если в двух
навигационных спецификациях используется одно и тоже значение X, для их отличия
можно использовать префикс, например Advanced-RNP 1 (усовершенствованные) и
Basic-RNP 1 (базовые). Как для обозначений RNP, так и RNAV, выражение «X» (где
оно приводится) указывает на точность боковой навигации в морских милях,
которая должна выдерживаться по крайней мере в течение 95% полетного времени
всеми воздушными судами, выполняющими полеты в пределах данного воздушного
пространства, по маршруту или по схеме полета. В тех случаях, когда в
обозначении навигационной спецификации в качестве составного элемента
используется навигационная точность, следует иметь в виду, что навигационная точность
является только одним из многих требований к характеристикам, включаемых в
навигационную спецификацию. [1]
Рис. 4. Пример мониторинга и выдачи предупреждений
Согласно Руководству по PBN 9613, существуют следующие
навигационные спецификации:
Спецификации RNAV:
RNAV 10 (RNP 10) - Для навигационных прикладных
процессов в океаническом и удаленном континентальном воздушном пространстве.5 -
используется на этапе полета по маршруту на основе RNAV в континентальном воздушном
пространстве;1 и 2 - используются на этапе полета по маршруту, при SID, STAR и
заходах на посадку на основе RNAV вплоть до FAF/FAP;
Спецификации RNP:
RNP 4 - используется на этапе полета по маршруту на основе
RNAV для обеспечения минимумов бокового и продольного эшелонирования,
основанного на расстоянии, в океаническом воздушном пространстве или отдаленных
районах;RNP 1 - используется для полетов на основе RNAV при SID, STAR и заходах
на посадку вплоть до FAF/FAP без или под ограниченным наблюдением органов ОВД и
при движении низкой - средней плотности;APCH - используется для обеспечения
схем захода на посадку на основе RNP вплоть до RNP 0,3, построенных с прямолинейными
участками. Этот тип может включать требование о наличии оборудования Baro-VNAV.AR APCH -
используется для обеспечения схем захода на посадку на основе RNAV с конечным
участком захода на посадку, на котором требуется RNР 0,3 или меньше,
построенных с прямолинейными участками и / или участками
постоянного радиуса. Требует получения эксплуатационного разрешения от
регламентирующего полномочного органа государства.
Спецификации RNP 2, и Advanced-RNP 1 находятся в стадии
разработки.
Применение инфраструктуры навигационных средств и
навигационных спецификаций в контексте концепции воздушного пространства на
маршрутах ОВД и в схемах полетов по приборам приводит к появлению третьего
компонента:
3) навигационного прикладного процесса.
Навигационный прикладной процесс представляет собой применение навигационной
спецификации и соответствующей инфраструктуры навигационных средств на
маршрутах ОВД, в схемах захода на посадку по приборам и / или в определенном
объеме воздушного пространства в соответствии с концепцией воздушного
пространства. Прикладной процесс RNP обеспечивается спецификацией RNP. Прикладной
процесс RNAV обеспечивается спецификацией RNAV.
2. Инфраструктура навигационных средств
.1 Навигационные средства, используемые в районе аэродрома
Для обеспечения выдерживания полета с заданной точностью для
выполнения требований PBN, необходимо присутствие трёх составляющих:
навигационное поле, бортовое оборудование позиционирования + вычислитель, база
навигационных данных (рис. 5).

Рис. 5. Условия обеспечения полетов по PBN.
Согласно требованиям спецификаций PBN, полеты могут быть
основаны на использовании оборудования RNAV, которое автоматически определяет
местоположение воздушного судна, используя входные данные от одного или
комбинации датчиков местоположения, в сочетании со средствами, которые задают
желаемую траекторию и обеспечивают следование по ней. При полетах в районе
аэродрома могут быть использованы следующие системы:
- Импульсная дальномерная система (DME)
- Инерциальные навигационные системы (IRU)
- Глобальная навигационная спутниковая
система (GNSS) и её дополнения.
Дадим общую характеристику данных систем и рассмотрим
критерии, которым они должны соответствовать при полетах по PBN.
2.2 Характеристика системы DМЕ
Импульсная дальномерная система DМЕ (Distance Measuring
Equipment) рекомендована ИКАО в качестве международной системы для обеспечения
полетов ВС ГА. DME относится к дальномерным радионавигационным системам.
Дальномерный способ определения координат DME/DME (по дальностям до двух
радиомаяков DME) обеспечивает более высокую точность определения
местоположения, чем угломерно-дальномерный. Это обусловлено достаточно высокой
точностью измерения дальностей и сравнительно медленным возрастанием
погрешностей по мере увеличения самой дальности. Так, вблизи радиомаяка средняя
квадратическая погрешность измерения дальности составляет около 0,1 м. мили, а
на удалении 140 м. миль имеет порядок 1,8 м. мили.
Для определения местоположения дальномерным способом ВС
должно находиться одновременно в зонах действия двух радиомаяков. Над
территорией Европы и США это условие, как правило, с избытком обеспечивается,
поэтому способ «DME/DME» рассматривается ИКАО как один из основных методов RNAV
в континентальных районах наряду с методами спутниковой навигации. [4]
Рассмотрим основные критерии концепции PBN, относящиеся к DME/DME
при полетах с использованием RNAV 1 и 2.
Система RNAV DME/DME должна:
- обновлять местоположение в пределах 30с с
момента настройки на навигационные средства DME;
- автоматически настраиваться на несколько
средств DME;
- обеспечивать постоянное обновление
местоположения по DME/DME. Третье средство DME или вторая пара должны быть
работоспособны по крайней мере в течение предыдущих 30 с и, когда система RNAV
переключается с одной станции / пары DME на другую, не должно быть перебоев в
определении местоположения по DME/DME.
Системы RNAV DME/DME должны использовать только те средства
DME, которые указаны в AIP государств. Координаты станций DME и превышение DME должны публиковаться.
Системы не должны использовать средства, указанные государством
в AIP как несоответствующие полетам по RNAV 1 и / или RNAV 2, или средства,
связанные с системой ILS или MLS, которая использует смещение дальности. Это
можно осуществить путем:
- исключения из бортовой навигационной базы
данных конкретных средств DME, которые, как известно, оказывают отрицательное
воздействие на навигационное решение, когда маршруты RNAV находятся в пределах
зоны приема этих средств DME;
- использования системы RNAV, которая
выполняет проверки на приемлемость с целью обнаружения погрешностей сигналов,
принимаемых от всех средств DME, и исключает эти средства, по мере
необходимости, из навигационного решения по определению местоположения
(например, не допускает настройку на средства DME с общим каналом, когда
сигналы в пространстве средств DME перекрываются).
Когда необходимо генерировать определение местоположения по
DME/DME, система RNAV должна использовать, как минимум, средства DME с
относительным углом пересечения направлений 30-150°(рис. 7).
Система RNAV может использовать любое действительное
принимаемое средство DME (перечисленное в AIP) независимо от его
местонахождения. Действительное средство DME:
- передает правильный сигнал идентификатора
средства;
Рис. 7. Угол между направлениями на DME должен быть ≥30° и
≤150°
- удовлетворяет минимальным требованиям к
напряженности поля;
- защищено от других создающих помехи
сигналов DME в соответствии с требованиями к общим и смежным каналам.
Когда необходимо генерировать определение местоположения по
DME/DME, система RNAV, как минимум, должна использовать работоспособное и
действительное DME в районе аэродрома (малая абсолютная высота) и / или на
маршруте (большая абсолютная высота) в любой точке в пределах следующей зоны
вокруг средства DME:
- большей чем или равной 3 м. мили (5,6 км)
от средства;
- меньшей чем 40° над горизонтом, если
смотреть от средства DME и на расстояние до 160 м. миль.
При использовании как минимум двух средств DME, отвечающих
вышеуказанным критериям и любых других средств DME, не отвечающих этим
критериям, 95-процентная погрешность расчета местоположения должна быть лучше,
чем следующее уравнение, или равна ему:
2σ = 2 ((σ21,air+ σ21,sis) + (σ22,air + σ22,sis))½ / Sin α, (1)
где: σsis = 0,0926 км;
σаir = МАХ {0,157 км или
0,125% от расстояния (как определено в RTCA DO-189 и TSO-C66c)};
30 ≤ α ≤150.
Такое требование к характеристикам соблюдается для любой
навигационной системы, которая использует одновременно две станции DME,
ограничивает угол пересечения направлений DME в пределах 30° - 150° и
использует датчики DME, которые отвечают точностным требованиям TSO-C66c. Если
система RNAV использует средства DME за пределами их опубликованной
установленной рабочей зоны действия, можно допустить, что погрешность сигнала в
пространстве DME от действительных установок все еще будет σground=0,05 м. миль. [1]
Требования к готовности системы DME, согласно Руководству по
PBN следующие:
Если полет выполняется с использованием DME, следует
проверить выпущенные NOTAM для определения состояния критических средств DME.
Пилотам следует оценить возможность выполнения полета (потенциально в другой
пункт) в случае отказа критического DME во время нахождения в воздухе.
В тех случаях, когда единственным навигационным средством для
обновления (коррекции) местоположения является DME, мертвые зоны в рабочей
области дальномерных систем могут помешать обновлению местоположения.
Интеграция инерциальных опорных блоков (IRU) может компенсировать нарушение
обслуживания DME. [1]
2.3 Характеристика инерциальных навигационных систем
Инерциальные навигационные системы являются автономными
системами определения местоположения ВС на основе счисления координат.
Измеренные акселерометрами ускорения ВС по трем осям координат интегрируются
цифровым вычислителем, что дает возможность получить координаты места ВС и всю
другую необходимую для навигации информацию.
В традиционных ИНС акселерометры устанавливают на
стабилизированной по азимуту и вертикали гироплатформе. В современных ИНС
платформа отсутствует, акселерометры жестко связаны с ВС, а их угловая
ориентация определяется по сигналам лазерных датчиков угловых скоростей.
Общей чертой любой системы счисления пути является
возрастание погрешностей определения координат с увеличением продолжительности
полета. [4] Оценки характеристик IRU показали, что после перехода на IRU
увеличение погрешности местоположения может составить менее 2 м. миль за каждые
15 мин.
Новейшие усовершенствованные ИНС имеют более высокую точность
за счет сопряжения со спутниковой навигационной системой, данные которой
используются для коррекции гироскопов.
В настоящее время при полетах в районе аэродрома с
использованием зональной навигации ИНС играет роль вспомогательного средства,
которое используется для контроля спутниковой информации, а также для
определения места ВС в те непродолжительные промежутки времени, когда
целостность СНС не обеспечивается, либо в случае разрывов зоны действия DME.
Основные критерии концепции PBN, относящиеся к
оборудованию DME/DME/IRU при полетах с использованием RNAV 1 и 2 следующие:
- Требуется наличие возможности
автоматического обновления (коррекции) местоположения при применении решения с
DME/DME. Эксплуатантам/пилотам следует связаться с изготовителями для того,
чтобы уметь распознать, подавляется ли сигнализация о переходе на инерциальный
полет после потери обновления радионавигационных данных
- Поскольку некоторые бортовые системы до
перехода на инерциальный полет переходят на основанную, на VOR/DME навигацию,
воздействие радиальной точности VOR, когда VOR находится дальше, чем 40 м. миль
от воздушного судна, не должно отрицательно влиять на точность местоположения
воздушного судна. Одним из способов достижения данной цели будет исключение
системами RNAV средств VOR, удаленных более чем на 40 м. миль от воздушного
судна. [1]
навигация зональный аэродром полет
2.4 Характеристика глобальной навигационной
спутниковой системы
Глобальный аэронавигационный план применительно к системам
CNS/ATM (Doc 9750) определяет Глобальную навигационную спутниковую систему
(ГНСС, GNSS, Global Navigation Satellite System) как ключевой элемент систем
связи, навигации и наблюдения / организации воздушного движения (CNS/ATM), а
также как основу, на которой государства могут предоставлять улучшенное
аэронавигационное обслуживание и внедрять процедуры зональной навигации.
ГНСС - глобальная система определения местоположения и
времени, которая включает одно или несколько созвездий спутников, бортовые
приемники и систему контроля целостности, дополнения по мере необходимости с
целью поддержания требуемых навигационных характеристик для планируемой
операции. ГНСС используется для обеспечения полетов методом зональной навигации
на маршруте, при выполнении схем стандартного вылета по приборам (SID), схем
стандартного подхода по приборам (STAR), неточного захода на посадку (NPA) и
точного захода на посадку.
Основными элементами ГНСС являются два основных спутниковых
созвездия - это GPS и ГЛОНАСС, поддерживаемые США и Российской Федерацией,
соответственно, согласно требованиям SARPs.
Внедрение в практику гражданской авиации спутниковых
навигационных систем явилось поистине революционным событием. В десятки и сотни
раз повысилась точность определения координат, определить местоположение ВС
стало возможным в любой точке земного шара, появилась возможность использовать
новые методы навигации.
GNSS обеспечит навигационное обслуживание во всех регионах
земного шара, включая океанические районы, маршруты и районы аэродромов, и на
всех этапах полета, включая заход на посадку вплоть до III категории. ИКАО считает,
что внедрение GNSS в принципе позволит государствам полностью или частично
ликвидировать существующую систему наземных навигационных средств (радиомаяков,
систем посадки). Правда, к отказу от традиционных средств ИКАО призывает
относиться осторожно.
В рамках концепции PBN рассматривается применение различных
навигационных средств, но в качестве основного - именно СНС, поскольку только
они способны обеспечить высокие требования к точности, предъявляемые на
некоторых этапах полета (табл. 1).
Таблица 1. Требования к характеристикам сигналов GNSS как
датчику навигационной информации
|
Этап полета
|
Точность по
горизонтали
|
Точность по
вертикали
|
Целостность
|
Время до выдачи
предупреждения
|
Непрерывность
|
Готовность
|
RNP
|
|
Маршрут
|
3,7 км 2,0 м.
мили
|
Не назначена
|
1 - 10-7 /ч
|
5 мин
|
От 1 - 10-4
/ч до 1 - 10-8 /ч
|
От 0,99 до
0.99999
|
От 20 до 10
|
|
Маршрут, район
аэродрома (прибытие)
|
0,74 км 0,4 м.
мили
|
Не назначена
|
1 - 10-7 /ч
|
15 с
|
От 1 - 10-4
/ч до 1 - 10-8 /ч
|
От 0,999 до
0,99999
|
От 5 до 1
|
|
Вылет, заход до
выхода на прямую, неточный заход
|
220 м 720 фут
|
Не назначена
|
1 - 10-7 /ч
|
10 с
|
От 1 - 10-4
/ч до 1 - 10-8 /ч
|
От 0,99 до
0,99999
|
От 0,5 до 0,3
|
|
Заход на
посадку с наведением по вертикали APV-I
|
220 м 720 фут
|
20 м 66 фут
|
1 - 2х10-7
за заход
|
10 с
|
1 - 8х10-6
в любые 15 с
|
От 0,99 до
0,99999
|
0,3/125
|
|
Заход на
посадку с наведением по вертикали APV-II
|
16,0 м 52 фут
|
8,0 м 26 фут
|
1 - 2х10-7
за заход
|
6 с
|
1 - 8х10-6
в любые 15 с
|
От 0,99 до
0,99999
|
0,03/50
|
|
Точный заход на
посадку
|
категория I
|
16,0 м 52 фут
|
6,0 - 4,0 м 20
-13 фут
|
1 - 2х10-7
за заход
|
6 с
|
1 - 8х10-6
в любые 15 с
|
От 0,99 до
0,99999
|
0.02/40
|
|
категория II
|
6.9 м 23 фут
|
2.0 м 6.5 фут
|
1 - 2х10-7
за заход
|
2 с
|
1 - 8х10-6
в любые 15 с
|
От 0,99 до
0,99999
|
0.01/15
|
|
категория III
|
6.1 м 20 фут
|
2.0 м 6.5 фут
|
1-10-7
за заход
|
1 с
|
1 - 10-7 в
любые 15 с
|
От 0,99 до
0,99999
|
0.003/z
|
В ближайшей перспективе будут одновременно работать три
глобальных навигационных спутниковых системы: GPS, ГЛОНАСС и GALILEO.
2.5 Функциональные дополнения СНС
Требования к точности в условиях PBN иногда (например, при
заходе на посадку) могут быть настолько высоки, что обычный режим использования
СНС, не обеспечивает требуемой точности. Например, при заходе на посадку
требуемая точность определения высоты измеряется дециметрами.
Для решения этих задач могут использоваться системы
функциональных дополнений СНС (augmentation systems).
Функциональным дополнением называется комплекс технических и
программных средств, предназначенный для обеспечения потребителя глобальной
навигационной спутниковой системы дополнительной информацией, позволяющей
повысить точность и достоверность определения его пространственных координат,
составляющих скорости движения и поправки часов и гарантирующей целостность
этой системы.
Существует три вида систем функциональных дополнений:
- бортовые, не требующие для своей работы
наземного или космического оборудования,
- наземные, в которых используются
расположенные на Земле дифференциальные корректирующие станции,
- спутниковые, в которых кроме наземных
станций используются специальные спутники, передающие на борт ВС необходимую
информацию.
Бортовые функциональные дополнения ABAS
(Aircraftbased augmentation system) представляют собой совокупность алгоритмов работы
приемника, обеспечивающих мониторинг целостности (AIM, autonomous integrity
monitoring). Существует два вида такого мониторинга - RAIM и AAIM. Оба основаны
на использовании избыточной навигационной информации.(Reciever Autonomous
Integrity Monitoring) - автономный контроль целостности в приемнике. Его
целями являются:
своевременное обнаружение неустойчиво работающего спутника и
исключение его из обработки для навигационных определений;
оценка текущей погрешности определения координат и выдача
предупреждения экипажу, если эта погрешность превышает допустимую;
прогноз целостности, то есть расчет геометрии расположения
исправно работающих спутников и точности навигационных определений в любой
заданной точке в заданное время с целью предупреждения экипажа о том, что
требуемая точность и надежность навигации по СНС в этой точке не будут
обеспечены.
AAIM (Aircraft Autonomous Integrity Monitoring) - бортовой автономный
мониторинг целостности. Он является эквивалентом или альтернативой RAIM. В этом
случае избыточная информация поступает в приемник не от спутников, а от
бортовых систем. Наиболее часто используется информация о координатах ВС от
инерциальных систем или полученная по двум дальномерным радиомаякам (DME/DME).
Часто в бортовой приемник поступает барометрическая высота от системы воздушных
сигналов.
В Руководстве по PBN приведены следующие требования к готовности бортовой
системы функционального дополнения (ABAS):
Уровни RAIM … можно проверить либо посредством NOTAM (где
таковые выпускаются), либо с помощью прогнозирования. Эксплуатационный орган
может предоставить специальные рекомендации относительно того, как соблюдать
данное требование (например, если имеется достаточное число спутников,
прогнозирование может не потребоваться). Эксплуатанты должны быть осведомлены о
данных прогнозирования, имеющихся для намеченного маршрута. В прогнозе
готовности RAIM следует учитывать последние NOTAM о созвездиях GPS и модель
бортового радиоэлектронного оборудования (если таковая известна). Такое
обслуживание может быть предоставлено ПАНО, изготовителем бортового
радиоэлектронного оборудования, другими организациями или с помощью функции
прогнозирования RAIM бортового приемника. В случае прогнозируемой, непрерывной
потери соответствующего уровня обнаружения отказов в течение более 5 мин для
любого участка полета … план полета следует пересмотреть (например, задержать
вылет или запланировать другую схему вылета).» [1]
В настоящее время в документах ИКАО и других международных
организаций отсутствуют стандарты, предъявляющие требования к алгоритмам ABAS и
к уровню целостности, который они должны обеспечить. Поэтому производители
бортовых приемников решают эту задачу по своему усмотрению. По некоторым
оценкам RAIM и AAIM обеспечивают целостность на уровне 
 . Но в современной навигации требования к точности и целостности
иногда столь высоки (порядка
. Но в современной навигации требования к точности и целостности
иногда столь высоки (порядка 
 ), что использование СНС в обычном режиме даже при наличии RAIM
или AAIM не может их обеспечить. В этом случае используются спутниковые или
наземные системы функциональных дополнений, которые основаны на
дифференциальном методе определения координат.
), что использование СНС в обычном режиме даже при наличии RAIM
или AAIM не может их обеспечить. В этом случае используются спутниковые или
наземные системы функциональных дополнений, которые основаны на
дифференциальном методе определения координат.
Функциональные дополнения СНС, основанные на дифференциальном
методе, разделяются на спутниковые и наземные в зависимости от того, каким
образом поправки передаются на борт ВС.
Спутниковые системы функционального дополнения SВАS
(SatelliteBased Augmentation System) поддерживают увеличение точности сигнала за счет использования
спутниковой трансляции сообщений. Такие системы обычно состоят из нескольких
наземных станций, координаты расположения которых известны с высокой степенью
точности. (рис. 9). SBAS позволяет осуществлять заходы на посадку
с горизонтальным и вертикальным наведением, по критериям APV I /II. (Approach with vertical guidance).
Примером исполнения SВАS является WААS (Wide Area
Augmentation System - Система функционального дополнения с широкой зоной
действия), созданная в США. В настоящее время система WAAS обеспечивает
дифференциальным сервисом территории Канады и Мексики и значительную часть
акватории Тихого Океана. Спутники передают GPS-подобный сигнал, а также
поправки к эфемеридам, времени, параметрам ионосферной модели.
Рис. 9. Спутниковая система функционального дополнения
Система WAAS создана для достижения возможности использования
GPS на всех этапах полета ВС, включая точный заход на посадку по I категории.
Погрешности определения координат имеют порядок 34 метров (Р = 0,95).
В Европе и Азии также функционируют системы широкозонных
функциональных дополнений. В Европе под эгидой Европейской комиссии,
Европейского космического агентства и Евроконтроля разработана система EGNOS
(European Geostationary Navigation Overlay Service), которая является
функциональным дополнением не только Navstar GPS, но также ГЛОНАСС и Galileo.
В системе используются три геостационарных спутника и сеть из
более чем 40 станций, расположенных в основном на территории Европы. Зона
действия охватывает и часть территории России (на расстоянии до тысячи
километров от ее западной границы). Заявленная точность определения координат
около одного метра. С 2009 г. система введена в эксплуатацию для бесплатного
использования.
В Японии разработана и используется система MSAS
(Multifunctional Satellite Augmentation System), являющаяся функциональным
дополнением GPS. Система включает в себя два геостационарных спутника и восемь
наземных станций.
Индия планирует развернуть к 2014 г. собственную систему
GAGAN (GPS Aided Geo Augmented Navigation). Ожидаемая точность определения
координат составляет 3 м.
В России находится в стадии разработки система
дифференциальной коррекции и мониторинга (СДКМ), которая посредством средств
доставки корректирующей информации и данных о целостности системы по наземным
(на основе подвижных и стационарных средств доступа в сеть Интернет) и
космическим (с помощью космического аппарата ретрансляции «Луч-5А») каналам
обеспечивает 100% покрытие навигационным полем территории России. Развернуты
также средства доставки данных о целостности системы, которые обеспечивают
доставку навигационной информации потребителю с предельной задержкой 10 с.
Планируется к 2014 г. развернуть 8 опорно-измерительных
(контрольных) станций - Мурманская обл. (Ловозеро), Екатеринбург, Тюменская
обл. (Ноябрьск), республика Саха (Якутск и Тикси), Магадан, Владивосток и
Южно-Сахалинск. Предполагается дальнейшее развитие системы и с использованием
глобальной сети станций сбора измерений СДКМ в пунктах за рубежом: Антарктида
(Новолазаревская), Австралия (Брисбен), Никарагуа (Манагуа), Бразилия (Натал) и
Индонезия (Джакарта).
Запуск двух других аппаратов «Луч-5Б» и «Луч-4» намечен на
2012 и 2014 гг. соответственно.
Планируется также создание в рамках СДКМ системы
высокоточного позиционирования с точностью навигационных определений на
территории Российской Федерации и стран СНГ на уровне 3…5 см в реальном
масштабе времени. [11]
Согласно документу PANSOPS, переход на навигацию SBAS осуществляется за 3,7
км (2,0 м. мили) до FAF. (рис. 10).
Рис. 10. Пример обозначения на схеме участка перехода на SBAS
Карта захода на посадку по приборам для схемы захода на
посадку по SBAS озаглавливается RNAV(GNSS) Rwy XX. Если применительно к одной и
той же ВПП публикуется несколько заходов на посадку по GNSS, используется
условное обозначение идентичных схем, при этом заход на посадку с самым низким
минимумом обозначается RNAV(GNSS) Z Rwy XX.
В наземных системах функциональных дополнений GBAS
(Groundbased Augmentation System) поправки и другая информация передаются
от наземных станций непосредственно на борт ВС в УКВ диапазоне по линиям
цифровой передачи данных. Для этого международными организациями выделен
диапазон частот 109117,975 МГц (рис. 11).выполняет следующие функции:
обеспечение локальных поправок к псевдодальности;
обеспечение данных о самой системе GBAS;
обеспечение данных для конечного участка захода на посадку
(угол наклона глиссады и т.п.);
Рис. 11. Принцип функционирования GBAS
обеспечение прогнозирования данных об эксплуатационной
готовности дальномерного источника;
обеспечение контроля целостности источников дальномерных
измерений СНС.
Если сеть станций GBAS охватывает территорию целого региона
(обычно размером от 400 до 2000 км), то ее называют региональной
дифференциальной подсистемой GRAS (Groundbased Regional Augmentation System).
Примером может служить австралийская GRAS, охватывающая территорию Австралии и
Новой Зеландии.
В том случае, когда GBAS включает в себя только одну наземную
станцию и дифференциальные поправки используются только до удаления 50200 км,
то такую систему называют локальной LAAS (Local Area Augmentation System).
Наиболее часто такие системы устанавливают на аэродромах. Они могут
обеспечивать точный заход на посадку (в перспективе вплоть до III категории).
Примером LAAS может быть разработанная в России система,
включающая в себя локальную контрольно-корректирующая станция ЛККС-А-2000 (ООО
«НППФ Спектр») и бортовое оборудование АПДД (ЗАО «ВНИИРА Навигатор»). [5]
Аппаратура ЛККС-А-2000 прошла все виды летных и
эксплуатационных испытаний и сертифицирована Межгосударственным авиационным
комитетом. Аппаратура ЛККС-А-2000 - это новейшее, не имеющее аналогов
оборудование, предназначенное для навигации и посадки воздушных судов по
спутникам GPS/ГЛОНАСС. Данное оборудование является единственным в России и за
рубежом, которое может осуществлять посадку воздушных судов одновременно по
двум группировкам - ГЛОНАСС и GPS, что значительно повышает целостность и
непрерывность спутниковой навигации.
Федеральным агентством воздушного транспорта выпущено
распоряжение №АЮ-142-р «О принятии на оснащение наземной локальной
контрольно-корректирующей станции комбинированной навигационной спутниковой
системы ГЛОНАСС/GPS ЛККС-А-2000» в аэропортах гражданской авиации.
Использование оборудования ЛККС-А-2000 позволяет выполнять заходы на посадку по
оптимальным траекториям, что экономит полетное время, расход топлива, ресурс
двигателей, увеличивает пропускную способность аэродромов, а также повышает безопасность
полетов и улучшает экологическую обстановку в районе аэропорта.
Бортовая система АПДД (аппаратура приема и преобразования
дифференциальных данных) выдает потребителям информацию для поддержания
процедур точного захода на посадку, в том числе цифровые дифференциальные
поправки для псевдодальностей спутниковых группировок ГЛОНАСС и GPS.
АПДД обеспечивает:
- корректировку характеристик
псевдодальности, которые формирует бортовой спутниковый приемник при помощи
работающей в УКВ-диапазоне наземной локальной контрольно-корректирующей
станции;
- посадку воздушных судов на аэродромы и
площадки не оборудованные посадочными системами практически с любым курсом
посадки;
- выдачу посадочной информации на штатные
аналоговые и цифровые приборы, а так же в САУ.
Карта захода на посадку по приборам для схемы захода на
посадку по GBAS озаглавливается GLS Rwy XX. Если применительно к одной и той же
ВПП публикуется несколько заходов на посадку по GBAS, используется условное
название идентичных схем, при этом заход на посадку с самым низким минимумом
обозначается GLS Z Rwy XX.
3. Зональная навигация в районе аэродрома
.1 Особенности полетов в районе аэродрома
По статистике бóльшая часть авиационных
инцидентов и катастроф просходит в районе аэродрома. Взлет и посадка являются
самыми сложными и ответственными этапами в особенности в загруженных аэропортах
или при неблагоприятных метеоусловиях. Проблемой обеспечения безопасности
помимо других факторов, является отсутствие точных посадочных систем, слишком
«большие» минимумы захода на посадку и несовершенные схемы прибытия и вылета.
Ситуацию осложняют горные аэродромы, не позволяющие разрабатывать схемы с
традиционными зонами учета препятствий и требующие повышенных градиентов на
этапе взлета. Наряду с этим возникает ряд других проблем. Рост городов вокруг
аэропортов вызывает необходимость снижения шума и вредных выбросов в атмосферу.
Но, к сожалению, требования к построению схем посадки по ILS не позволяют
разрабатывать гибкие короткие схемы и обходить запретные зоны, участки с
повышенной чувствительностью к шуму. Необходимо сокращать длину конечного
участка захода на посадку, так как при снижении увеличивается потребление
топлива, и как следствие - загрязнение окружающей среды. PBN призвана
усовершенствовать глобальные аэронавигационные процедуры и технологии, с тем
чтобы повысить безопасность полетов, а также экологическую безопасность
воздушного транспорта, его экономичность и надежность.
3.2 Общие положения концепции зональной навигации
в районе аэродрома
Схемы с использованием зональной навигации формируются
точками пути (waypoints, WPT, WP). Точки пути задаются
географическими координатами - широтой и долготой. Все географические
координаты должны публиковаться в WGS-84. Каждой точке присваивается уникальный
идентификатор. WP соединяются прямыми с указанием курса и расстояния между точками.
При разработке схем следует использовать минимальное количество точек пути.
В схемах захода на посадку на основе RNAV, от точки начала захода
на посадку до точки пути, в которой завершается участок ухода на второй круг,
используется не более девяти точек.
По правилам прохождения WP подразделяются на два
типа: Fly-by и Fly-over (рис. 12).

Рис. 12. Точки fly-by и fly-over
Контрольные точки облета (Fly-By) - это контрольные точки,
в которых разрешается упреждение разворота. В переходе типа «fly-by», самолет
проходит на некотором расстоянии от контрольной точки, по внутренней траектории
(не перелетая точку), определяемой путевой скоростью и углом между участками.
Контрольные точки пролета (Fly-Over) - это контрольные точки,
в которых упреждение разворота не разрешается и не предполагается. Эти
контрольные точки могут обозначать (или не обозначать) изменение траектории при
переходе от одного заданного участка к другому. Назначение контрольных точек
пролета (fly-over) на трассах крайне не одобряется. Контрольные точки пролета
приводят к перелету через контрольную точку и необходимости возвращаться к
линии пути следующего участка.
Зона допуска на контрольную точку схем RNAV строится в виде
прямоугольника, размеры которого определяются точностными характеристиками
системы RNAV (Рис. 13).
Рис. 13. Допуски на контрольную точку RNAV
XTT - поперечный допуск на КТ
ATT - продольный допуск на КТ
Рассмотрим RNAV на основе базовой GNSS. Суммарная погрешность
системы TSE используется для определения значений ХТТ и АТТ следующим образом:
ХТТ = TSE, АТТ = 0,8*TSE.
Половина ширины зоны учета препятствий (½ W) во всех применениях RNAV и RNP определяется следующим образом:
½ W = 1,5
× XTT + BV,
где: XTT - значение поперечного допуска 2σ (TSЕ);- значение буфера.
Посредством добавления значения буфера учитываются отклонения
погрешностей, превышающих значение трех стандартных отклонений (3σ). Значения BV, основанные на характеристиках воздушного судна
(скорость, маневренность и т.д.) и этапе полета (время реакции пилота, время
воздействия и т.д.) приведены в табл. 2
Таблица 2. Значения буфера для RNAV
|
Этап полета
|
Значение буфера
|
|
Маршрут, SID и
STAR (расстояние, превышающее или равное 56 км от КТА вылета или назначения)
|
3 704 м
|
|
Район аэродрома
(STAR, начальный и промежуточный этапы захода на посадку менее56 км от КТА,
SID и уход на второй круг более 28 км, но менее 56 км от КТА)
|
1 852 м
|
|
Конечный
участок захода на посадку
|
926 м
|
|
Уход на второй
круг и SID на расстоянии до 28 км от КТА
|
926 м
|
Так как полная и соответствующая 95% погрешность RNP распределена в пределах
круга с радиусом, равным величине RNP, зоны допуска на контрольную точку определяются
кругами с радиусом, равным величине RNP.
Поперечный и продольный допуски (ХТТ и АТТ) равны величине RNP. Половина ширины зоны RNP определяется формулой: 2 × XTT + BV, где BV - величина буфера (табл.
3).
В зонах ожидания используются иные принципы.
При использовании RNAV на основе DME/DME точность использования
системы (DTT) бортового приемного оборудования определяется формулой (1) (см. 2
главу).
Значения АТТ, ХТТ и ½ W рассчитываются для α=90°, если в схеме используется более двух станций DME (т.е. показания,
по крайней мере, двух DME имеются в любой точке линии пути). В других случаях
используется значение α = 30°.
Для определения допуска на технику пилотирования применяются
значения, представленные в табл. 4.
Таблица 3. Значения буфера для RNP
|
Участок
|
Значение буфера
|
|
Вылет
|
566 м (0,30 м. мили)
|
|
Прибытие/начальный / промежуточный этапы захода на посадку
|
926 м (0,50 м. мили)
|
|
Конечный этап
захода на посадку
|
370 м (0,20 м. мили)
|
|
Уход на второй
круг
|
566 м (0,30 м. мили)
|
Таблица 4. Значения допуска на технику пилотирования
|
Этап полета
|
FTE (95%) В
зависимости от требуемой навигационной спецификации
|
|
Маршрут
(расстояние, превышающее или равное 56 км от КТА вылета или назначения)
|
RNAV
5 - 4 630 м RNP 4 - 3 704 м RNAV 2 - 1 852 м RNAV 1 - 926 м Basic RNP-1 - 926 м
|
|
Район аэродрома
(SID, STAR, начальный и промежуточный этапы захода на посадку менее 56 км от
КТА)
|
RNAV
2 - 1 852 м RNAV 1 - 926 м Basic RNP-1 - 926 м RNP APCH -
926 м
|
|
Конечный
участок захода на посадку
|
RNP APCH - 463
м
|
|
Уход на второй
круг
|
RNP APCH - 926
м
|
Допуск на вычисления в системе (ST) составляет ±463 м.
Получение поперечного допуска ХТТ и продольного допуска АТТ в
любой контрольной точке, определяемой точкой пути, производится путем
объединения допусков DTT, FTE, ST на основе вычисления квадратного корня из суммы
квадратов.
Поперечный допуск от линии пути (ХТТ) в любой контрольной
точке определяется как:
XTT = ± (DTT2 + FTЕ2 + ST2)½
Продольный допуск от линии пути (АТТ) в любой контрольной
точке определяется как:
ATT = ± (DTT2 + ST2)½.
Половина ширины зоны учета препятствий (½ W) в точке пути определяется также как и для GNSS уравнением:
½ W = ХТТ × 1,5 + BV
3.3 Кодирование базы навигационных данных
С повышением требований к точности выполнения полетов,
повышается и требования к качеству навигационных баз данных.
При разработке структуры воздушного пространства с позиции
заданных траекторий полета воздушных судов используются только два типа
участков маршрутов: прямолинейная траектория или криволинейная между
определенными точками. Это позволяет:
- обеспечить программирование (кодирование)
заданных траекторий полета в базах данных и вычислителях оборудования RNAV;
- создать надежные, повторяемые и
предсказуемые траектории.
Корпорацией ARINC была разработана концепция «Path and
Terminators» (Траектория и ограничители), которая применяется для
преобразования схем вылет, прибытие и заход на посадку в закодированные
траектории в базе данных, которые могут быть интерпретированы и использованы
компьютерной навигационной системой. Концепция не применяется для воздушных
трасс. В концепции «Path and Terminator» используется набор определенных кодов,
называемых ограничителями траектории (Path Terminator). Ограничитель указывает
воздушному судну способ навигации от исходного местоположения до конкретной
точки или завершающего условия. Последовательность ограничителей задает
траекторию вылета от взлета до точки на трассе или траекторию прибытия и захода
на посадку - от точки на трассе до точки ухода на второй круг, посадочного
порога ВПП или точки зоны ожидания на схеме ухода на второй круг.
Для кодирования участков, используемых в существующих схемах
как основанных, так и не основанных на зональной навигации, применяются 23
различных ограничителя траектории. Эти ограничители обозначаются двумя буквами,
каждая из которых имеет определенное значение для компьютерной навигационной
системы при описании полетного маневра. Первая буква указывает тип траектории
на данном участке, а вторая - каким образом полет по данному участку должен
быть завершен (ограничен). В табл. 5 показаны 9 типов ограничителя траектории,
которые пригодны для кодирования участков RNAV в воздушном пространстве RNP.
Только те наборы, которые обозначены как предпочтительные, приводят к
повторяемой траектории полета.
В некоторых случаях может потребоваться абсолютно
предсказуемая и повторяемая траектория, которая может быть достигнута только
при использовании контрольной точки облета (fly-by), связанной с разворотом
фиксированного радиуса.
В зависимости от типа контрольной точки для бортовых систем
переход будет являться переходом облета (fly-by), переходом пролета (fly-over)
или переходом с разворотом фиксированного радиуса.
Переходы фиксированного радиуса не используются для процедур
в районе аэродрома. Вместо этого постоянный радиус разворота в процедурах
прибытия, вылета и захода на посадку обеспечивается применением типа участка
RF.
Таблица 5. Ограничители траектории пригодные для кодирования
схем зональной навигации
|
Типы
Участ-ков
|
Пример
участка
|
Описание
|
RNP RNAV
|
|
IF
|

|
InitialFix Начальная контрольная точка
|
Да
(Предпочтительно)
|
|
TF
|

|
TracktoFix Линия пути до контрольной точки
|
Да
(Предпочтительно)
|
|
RF
|
|
RadiustoFix Дуга до контрольной точки
|
Да
(Предпочтительно)
|
|
DF
|

|
DirecttoFix Прямо до контрольной точки
|
Да
(Нежелательно)
|
|
FA
|
|
FixtoAltitude
(Climb) От контрольной
точки до высоты (Набор)
|
Да
(Нежелательно)
|
|
CF
|
|
CoursetoFix Путевой угол до контрольной точки
|
Да (Будет
исключено)
|
HF 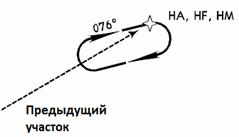 Hold to Fix (And Exit)
Hold to Fix (And Exit)
Ожидание с одним полным разворотом до контрольной точки (и
выход)Да
|
(Новые критерии
RNP для зоны ожидания)
|
|
|
|
|
HA
|
|
HoldtoAltitude
(Climb) Ожидание до
набора высоты (набор)
|
Да (Новые
критерии RNP для зоны ожидания)
|
|
HM
|
|
HoldforClearance
Ожидание до указания
УВД
|
Да (Новые
критерии RNP для зоны ожидания)
|
Многие из них не знакомы либо с траекторией и указателями,
используемыми для кодирования систем RNAV, либо с функциональными возможностями
различных систем RNAV.
Однако многие из этих трудностей можно преодолеть при наличии
взаимодействия между разработчиками схем и производителями данных, которые
предоставляют кодированные данные поставщикам навигационных баз данных.
При разработке схем для воздушного пространства RNP, между
заданными точками, могут использоваться только прямолинейные или криволинейные
участки.
Прямолинейный участок - это участок между
двумя контрольными точками, который будет закодирован в базе данных, как линия
пути до контрольной точки, то есть тип участка TF. Для RNP «линия пути
до контрольной точки» является приоритетным прямолинейным участком маршрута.
Если линия пути является начальным участком траектории
полета, то для того, чтобы закодировать или задать начальную точку, в базе данных
используется начальная контрольная точка или тип участка IF. В противном
случае, первой контрольной точкой линии пути будет контрольная точка завершения
предыдущего участка.
Криволинейный участок, это криволинейная
траектория вокруг заданного центра разворота. Криволинейный участок
используется тогда, когда требуется разворот, и будет кодироваться, как дуга
до контрольной точки, или тип участка RF. Криволинейный участок
начинается в конечной контрольной точке предыдущего участка и заканчивается
там, где криволинейная траектория является касательной к следующему участку. И
входная и выходная траектории должны являться касательными к дуге криволинейной
траектории, а контрольная точка завершения предыдущего участка должна
находиться на дуге. Сама криволинейная траектория вычисляется навигационной
системой, используя контрольную точку ограничения, направление разворота и
точку центра дуги, все из которых содержатся в навигационной базе данных.
Радиус вычисляется, как расстояние от центра разворота до контрольной точки
ограничения. Проектировщик схемы должен обеспечить, все необходимые данные,
включая географическое местоположение центра дуги и гарантировать, что данные
не приведут к разрывам в заданной траектории.
Использование криволинейных участков должно рассматриваться
только в случае, когда использование прямолинейных участков невозможно. Для
выполнения криволинейного конечного этапа захода на посадку требуется
оборудование VNAV. [6]
Применение участков RF в схемах обеспечивает более гибкую траекторию, что
можно увидеть на рис. 14, сравнив две разные схемы для одного порога с общими
точками IAF на аэродроме Сиэттл.
Участки DF и FA должны использоваться только тогда, когда
предпочтительные прямолинейные или криволинейные траектории, описанные выше,
применяться не могут. Они не могут обеспечить линию пути, повторяемую при всех
условиях, но являются альтернативным вариантом построения участка, который
может быть закодирован в базе данных для достижения ограниченной совместимости
с RNP.
Тип участка CF будет разрешаться для использования в
схемах RNP только в течение переходного периода. Со временем ожидается, что при
построении схем RNP разработчики будут избегать использования этого участка, и
его будут заменять участком, задаваемым фиксированной линией пути до
контрольной точки (TF). Поскольку путевой угол является магнитным, в
определении траектории полета ВС возможны ошибки из-за неточности величины
магнитного склонения, используемого для расчета траектории. Это обстоятельство
в совокупности с необходимостью применения малых значений RNP, например RNP 0.3
при заходе на посадку, делает тип участка CF непригодным для использования в
схемах, разработанных для воздушного пространства RNP. [6]
3.4 Схемы прибытия и вылета
Существующие концепции воздушного пространства в районе
аэродрома, которые включают прибытие и вылет, обеспечиваются прикладными
процессами RNAV. Они в настоящее время применяются в Европейском (EUR) регионе
и в Соединенных Штатах Америки. Применяемое в европейском воздушном
пространстве RNAV в районе аэродрома известно как P-RNAV (Precision (точная)
RNAV). Хотя у спецификации RNAV 1 такая же навигационная точность, как и у
P-RNAV, эта региональная навигационная спецификация не отвечает всем
требованиям спецификации RNAV 1. Применяемый в Соединенных Штатах Америки в
районе аэродрома прикладной процесс, ранее известный как US RNAV тип B, уже
приведен в соответствие с концепцией PBN и теперь называется RNAV 1.
Навигационная спецификация RNAV 1 и 2 разработана в первую
очередь для полетов по RNAV в условиях радиолокационного контроля (для SID
радиолокационное обслуживание должно обеспечиваться до первого изменения курса
по RNAV). Навигационная спецификация Basic-RNP 1 предназначена для аналогичных
полетов за пределами зоны действия радиолокационного обслуживания. В будущем,
как ожидается, будут разработаны новые прикладные процессы RNP для районов
аэродрома.
Полеты по RNAV 1 и RNAV 2 основаны на использовании
оборудования RNAV, которое автоматически определяет местоположение воздушного
судна в горизонтальной плоскости, используя входные данные от следующих типов
датчиков местоположения:
- глобальная спутниковая навигационная
система (GNSS).
Данные о местоположении от других типов навигационных
датчиков могут быть интегрированы с данными GNSS, если другие данные о
местоположении не приводят к погрешностям определения местоположения,
превышающим требования к суммарной точности системы. Как минимум, целостность
должна обеспечиваться бортовой системой функционального дополнения.
- оборудование RNAV DME/DME
- оборудование RNAV DME/DME/IRU
В AIP следует четко указать, какой навигационный прикладной
процесс используется: RNAV 1 или RNAV 2.
Навигационная спецификация Basic-RNP 1 позволяет
разработать маршруты для стыковки между маршрутной структурой и воздушным пространством
в районе аэродрома при отсутствии наблюдения ОВД или ограниченном наблюдении
ОВД в условиях низкой или средней плотности воздушного движения. Для
обеспечения Basic-RNP 1 основной навигационной системой будет являться GNSS.
Хотя системы RNAV, основанные на DME/DME, способны обеспечить точность
Basic-RNP 1, данная навигационная спецификация в первую очередь предназначена
для среды, в которой инфраструктура DME не может обеспечить зональную навигацию
DME/DME в соответствии с требуемыми характеристиками. Повышенный уровень
сложности в требованиях к инфраструктуре DME и к ее оценке означает, что ее
повсеместное использование нецелесообразно или нерентабельно.
Полеты по SID/STAR с RNAV 1 и 2 и Basic-RNP 1
главным образом выполняются в условиях наличия прямой связи «диспетчер -
пилот». [1]
Требования к основным характеристикам (точности, целостности,
непрерывности и т.д.) приведены в табл. 6. Помимо требований к основным
характеристикам в спецификациях приведены функциональные требования, в том
числе к навигационным индикаторам. Требования к готовности систем указаны в
Главе 2. «Инфраструктура навигационных средств».
На карте стандартного прибытия публикуется RNAV STAR. Связанные с применением
RNAV требования в отношении оборудования, производства полетов или
навигационных функциональных возможностей указываются на карте в виде
примечания, например: «Требуется GNSS» или «Требуется GNSS или DME/DME/IRU» или
«Требуется BATEL 1L RF» или «Требуется RF». [3]
Таблица 6. Требования к характеристикам системы при
реализации RNAV 1 и 2, Basic-RNP 1
|
Характеристики
|
Требования
|
|
RNAV
1
|
RNAV2
|
Basic-RNP
1
|
|
Точность (95%
времени)
|
Боковая
погрешность
|
±1 м. миль
|
±2 м. миль
|
±1 м. миль
|
|
Продольная
погрешность
|
±1 м. миль
|
±2 м. миль
|
±1 м. миль
|
|
FTE
|
|
|
±0,5 м. миль
|
|
Целостность
|
Неисправность
бортового навигационного оборудования классифицируется по нормам летной
годности как состояние серьезного отказа (т.е. 10-5 в час).
|
|
Непрерывность
|
Потеря функции
классифицируется как состояние незначительного отказа, если эксплуатант может
перейти на другую навигационную систему и следовать в соответствующий
аэропорт.
|
|
Контроль за
выдерживанием характеристик и выдача предупреждений.
|
-
|
-
|
Система RNP
(или вместе система RNP и пилот) выдает предупреждение, если требование к
точности не соблюдается или если вероятность того, что боковая TSE превысит 2
м. мили, больше чем 10-5.
|
В целом ряде крупных аэропортов в настоящее время
используются маршруты SID и STAR на основе RNAV 1 или RNP 1, и во многих
случаях продуманное проектирование схем позволило получить значительную
экономию в плане количества пройденных по траектории миль и уменьшения
воздействия на окружающую среду (рис. 15).
Рис. 15. Внедрение SID и STAR на основе
PBN в глобальном масштабе
3.5 Схемы захода на посадку
Концепции захода на посадку охватывают все участки захода на
посадку по приборам, т.е. начальный, промежуточный, конечный и уход на второй
круг. Для них все в большей степени будут требоваться спецификации RNP с
навигационной точностью 0,3 м. миль - 0,1 м. миль или ниже. Как правило, данный
этап полета характеризуют три вида прикладных процесса RNP: новые схемы на ВПП,
на которые никогда не выполнялись схемы полетов по приборам, схемы, которые
либо заменяют существующие схемы полетов по приборам, либо служат запасными
схемами для существующих схем, основанных на других технологиях, а также схемы,
разработанные для улучшения доступа к аэропорту в сложных экологических
условиях. Соответствующими спецификациями RNP являются RNP APCH и RNP AR APCH.
Схемы захода по RNP (RNP APCH) включают существующие
схемы захода по RNAV (GNSS), построенные с прямолинейным участком, позволяющие
выполнять двухмерные (2-D) неточные заходы на посадку (Non-precision approach (NPA)), а также трехмерные
(3-D) заходы на посадку с
вертикальным наведением с помощью метода барометрической вертикальной навигации
(Baro-VNAV).
В отношении аспекта боковой навигации (навигация 2D),
основной навигационной системой, обеспечивающей схемы RNP APCH, является GNSS. Схемы ухода на второй
круг могут обеспечиваться либо участками RNAV, либо обычными участками
(например, на основе использования NDB, VOR, DME). RNP APCH не содержат
конкретных требований в отношении связи или наблюдения ОВД. Адекватная высота
пролета препятствий обеспечивается за счет характеристик воздушного судна и
эксплуатационных правил. Требования к основным характеристикам приведены в
табл. 7.
Таблица 7. Требования к характеристикам системы при
реализации RNP APCH
|
Характеристики
|
Требования
|
|
RNP
APCH
|
|
Участки начального,
промежуточного этапов захода на посадку и уход на второй круг
|
Участок
конечного этапа захода на посадку
|
|
Точность (95%
времени)
|
Боковая
погрешность
|
±1 м. миль
|
0,30 м.миль
|
|
Продольная
погрешность
|
±1 м. миль
|
0,30 м.миль
|
|
FTE (95%)
|
< 0,50
м.миль
|
< 0,25
м.миль
|
|
Целостность
|
Неисправность
бортового навигационного оборудования классифицируется по нормам летной
годности как состояние серьезного отказа (т.е. 10-5 в час).
|
|
Непрерывность
|
Потеря функции
классифицируется как состояние незначительного отказа, если эксплуатант может
перейти на другую навигационную систему и следовать в соответствующий
аэропорт. Если схема ухода на второй круг основана на обычных средствах
(например, NDB, VOR, DME), соответствующее навигационное оборудование должно
быть установлено и исправно.
|
|
Контроль за
выдерживанием характеристик и выдача предупреждений.
|
Бортовое
навигационное оборудование выдает предупреждение, если вероятность
погрешностей сигнала в пространстве, являющихся причиной боковой погрешности
местоположения более 2 м. миль, превышает 10-7 в час.1
|
Бортовое
навигационное оборудование выдает предупреждение, если вероятность
погрешности сигналов в пространстве, являющихся причиной боковой погрешности
местоположения более 0,6 м. мили, превышает 10-7 в час.
|
Для обеспечения вертикального наведения на конечном участке
захода на посадку применяется барометрическая вертикальная навигация (Baro-VNAV, баро-VNAV).
Барометрическая вертикальная навигация представляет собой
навигационную систему, которая выдает пилоту вычисленное вертикальное наведение
относительно определенного угла траектории в вертикальной плоскости (VPA,
Vertical path angle), номинальное значение которого составляет 3°.
Обеспечиваемое с помощью ЭВМ вертикальное наведение основывается на
барометрической высоте и определяется в виде угла траектории в вертикальной
плоскости от относительной высоты опорной точки (RDH, Reference datum height).
Схемы захода на посадку по Baro-VNAV классифицируются как схемы полетов по
приборам для обеспечения заходов на посадку и посадок с вертикальным наведением
(APV). В связи с этим при построении таких схем вместо MDA/H используется DA/H
и не определяется ни FAF, ни точка ухода на второй круг (MAPt). Для определения
OCH/A используются аналогичные
ILS поверхности оценки препятствий, которые, однако, основываются на
специальных системах горизонтального наведения.
Оптимальным публикуемым значением VPA является 3°; это
значение не должно составлять менее 3 или более 3,5°.
Участок APV при баро-VNAV выравнивается по продолжению осевой
линии ВПП и включает конечный участок снижения для посадки, начальный,
промежуточный и конечный участки ухода на второй круг.
Для обеспечения вертикальной навигации (VNAV) полномочные
органы гражданской авиации должны гарантировать, что углы / градиенты наклона
траектории на конечном этапе захода на посадку, использованные при построении
схемы, опубликованы в AIP. Эти углы наклона траектории должны гарантировать
возможность бесступенчатого снижения. Эксплуатанты предпочитают оперировать
именно углами наклона траектории, а не градиентами. Оптимальным углом наклона
траектории на конечном этапе захода на посадку является 3° и он должен
использоваться всегда, когда это возможно в соответствии с Doc 8168 ICAO.
Барометрическая траектория снижения зависима от плотности
воздуха, которая в свою очередь зависит от температуры. Если фактическая
температура ниже температуры по стандартной атмосфере, то в полете фактические
высоты и фактический угол наклона траектории будут ниже индицируемых в кабине
экипажа или вычисленных системой RNAV (но будут одинаковыми для всех воздушных
судов). При температуре выше стандартной, фактические высоты и фактический угол
наклона траектории будут выше, чем заданы разработчиком схемы. В системах RNAV
есть возможность обеспечить приблизительную температурную компенсацию, но
большинство существующих систем такой возможности не имеют. Следовательно,
влияние температуры должно учитываться следующими способами:
- разработкой схем Baro-VNAV для наихудших
температурных условий;
- внедрением эксплуатационных требований на
внесение температурной поправки в соответствии с Doc 8168 ИКАО
(автоматически в системах RNAV или вручную экипажем).
- внедрением ограничений на температуру
воздуха для схем Baro-VNAV комбинацией из вышеприведенных способов.
Операции захода на посадку с барометрической VNAV
основываются на использовании оборудования RNAV, которое автоматически
определяет местоположение воздушного судна в вертикальной плоскости, используя
входные сигналы оборудования, в которое могут входить:
- ЭВМ воздушных параметров,
- система воздушных параметров, система
барометрических высотомеров.
- интегрированные системы, имеющие
сертификат типа иобеспечивающие возможности систем воздушных параметров
К Baro-VNAV предъявляются следующие требования:
- Должна быть продемонстрирована менее чем
99,7 - процентная вероятность допущения погрешностей.
- Должна быть продемонстрирована величина
вертикальных погрешностей, обусловленных техникой пилотирования, менее той,
которая приводится в Руководстве по PBN на трехсигмовой основе.
- Для операций, основанных на применении
барометрической VNAV, требуется по крайней мере одна система RNAV.
Карта захода на посадку по приборам сопровождается
обозначением RNAV(GNSS) Rwy XX. В окнах минимальных значений на карте
приводятся значения ОСА/Н для полетов по NPA (LNAV) и APV/баро - VNAV
(LNAV/VNAV) (рис. 16).
Рис. 16. Пример публикации OCA/Hдля LNAVиLNAV/VNAV
Кроме того, публикуется следующая информация:
- RDH (координаты точек пути, относительная высота);
- VPA (градусы и сотые доли для баз данных /
градусы и десятые доли для карт);
- минимальная температура, для которой
разрешены полеты с использованием баро-VNAV; (рис17)
- FAF и MAPt LNAV только для целей
кодирования базы данных. [3]

Рис. 17. Пример публикации минимальной температуры для Baro-VNAV
Схемы захода на посадку по RNP AR APCH (RNP authorization required approach) классифицируются как
заходы на посадку с вертикальным наведением (APV). Этот тип операции требует
наличия системы позитивного вертикального наведения (VNAV) на конечном участке
захода на посадку (FAS, Final approach segment). В нынешних реализациях
RNP AR APCH используется система барометрической вертикальной навигации (Baro-VNAV), отвечающая
установленным требованиям летной годности. Запас высоты над препятствиями
основывается на статистической оценке всех составляющих погрешностей,
называемых бюджетом погрешности в определении высоты (VEB, Vertical error budget).
Могут использоваться и другие системы вертикального наведения при условии
обеспечения эквивалентной точности, целостности и пределов удерживания. Схемы
RNP AR APCH могут строиться в расчете на различные минимумы RNP, например RNP
0,3, RNP 0,2, вплоть до RNP 0,1. Однако разработчики схем не должны предлагать
схемы с RNP менее 0,3, если только они не дают какую-либо эксплуатационную
выгоду. Снижение показателя RNP уменьшает пределы срабатывания сигнализации и
повышает вероятность ее срабатывания и последующего ухода на второй круг, следовательно
публикуемые минимумы RNP не должны быть меньше необходимых для обеспечения
требуемых эксплуатационных возможностей. Критерии RNP AR APCH применяются
только в отношении тех воздушных судов и эксплуатантов, которые прошли
установленную дополнительную сертификацию, получили утверждение и соблюдают
требования к подготовке персонала. [2]
Спецификация RNP AR APCH была разработана специально для нестандартных
аэродромов, на которых обычные схемы не обеспечивают требуемый уровень
безопасности.
Схемы захода на посадку RNP AR APCH могут применяться для
повышения безопасности полетов и доступа к аэродрому там, где обычную схему
захода на посадку невозможно выровнять на ВПП. Например схема RNP AR APCH в аэропорту Гонолулу
(США), за счёт участка разворота с заданным радиусом до контрольной точки RF обеспечивает
стабилизированный заход на посадку с конечным участком выровненным на ВПП (рис.
18).

Рис. 18. Схема захода на посадку RNP AR APCH в аэропорту Гонолулу.
Также схемы RNP AR APCH применяются для улучшения доступа к аэродрому в
горной местности. В Гонконге (Китай) и Квинстоуне (Новая Зеландия) такие схемы
обеспечивают заход на посадку в условиях сложного горного рельефа.
Схемы RNP AR APCH могут применяться для улучшения доступа к
аэродрому в сильно загруженном воздушном пространстве.
Для схем RNP AR полуширина основной зоны определяется равной
2 × RNP (рис. 20). При этом отсутствуют буферные или
дополнительные зоны. В табл. 8 перечислены значения RNP для конкретных участков
схемы полетов по приборам. [2]
Таблица 8. Значения RNP для конкретных участков схем
|
Участок
|
Значения RNP
|
|
Максимальное
|
Стандартное
|
Минимальное
|
|
Начальный
|
1
|
1
|
0,1
|
|
Промежуточный
|
1
|
1
|
0,1
|
|
Конечный
|
0,5
|
0,3
|
0,1
|
|
Уход на второй
круг
|
1
|
1
|
0,1
|
Карты захода на посадку на основе RNP с нанесенными на них
схемами, отвечающими критериям навигационной спецификации RNP AR APCH, должны
включать в обозначение слово «RNAV(RNP)». Связанные с RNAV
требования в отношении оборудования, производства полетов или навигационных
возможностей должны быть приведены на карте в виде примечания. Например:
«требуется сдвоенное оборудование GNSS» или «требуется IRU», «требуется RF». Также
для схем RNP AR APCH могут потребоваться касающееся требования в отношении
получения специальной санкции, а для схем RNP AR APCH с RNP ухода на второй
круг менее 1,0 требуется следующее примечание: «Переход на RNP ухода на второй
круг для бокового наведения не должен начинаться до достижения продольной точки
DA/H». [3]
Ввиду уменьшения высоты пролета препятствий и более
совершенных функциональных возможностей, требования в отношении RNP AR APCH
носят особый характер и отличаются от требований в отношении других
спецификаций. К RNP AR APCH предъявляются особые требования к вертикальной
точности. Требуется особый мониторинг и выдача предупреждений, обусловленные
сокращенными боковым интервалом и высотой пролета препятствий.
Требования к боковой точности от 0,1 до 0,3 м. миль в течение
95% полетного времени. Это включает погрешность местоположения, погрешность
техники пилотирования (FTE), погрешность определения траектории (PDE) и
погрешность индикации. Продольная погрешность местоположения воздушного судна
также не должна превышать применимую величину точности в течение 95% полетного
времени.
Критическим компонентом RNP являются требования в отношении
RNP при заходе на посадку, способность бортовой навигационной системы
осуществлять контроль за достигнутым уровнем навигационных характеристик и
определять (индицировать пилоту), соблюдается ли или не соблюдается в ходе
операции эксплуатационное требование (например, «Unable RNP» («Обеспечить RNP
не могу»), «Nav Accur Down grad» («Навигационная точность ухудшилась»)). [1]
Существуют следующие критерии специального навигационного
обслуживания:
- Доступность сигналов GNSS требуется для начала
полета по любой схеме RNP AR APCH
- Инерциальная навигационная система (IRU)
требуется для полета по любой схеме RNP AR APCH с величиной точности менее 0,3
м.миль или участку ухода на второй круг с RNP менее 1,0 м.мили.
- Обновление данных о местоположении ВС с
помощью DME/DME может служить в качестве режима переключения, если
инфраструктура и бортовое оборудования могут обеспечить требуемые
эксплуатационные характеристики при уходе на второй круг.
- Система RNAV не может использовать
обновление данных о местоположении ВС с помощью маяка VOR.
Эксплуатационные характеристики высотомеров являются ключевым
элементом при полетах по схемам RNP AR APCH. Установленные критерии требуют
двух независимых высотомерных источников, установленных в основном поле
видимости пилотов. Они также требуют выполнения летными экипажами перекрестных
проверок высотомеров в пределах ±100 фут. [1]
Также предъявляются специальные требования в отношении схем RNP AR APCH, включающим в себя
участки RF, в отношении заходов на посадку по RNP AR в соответствии с RNP
менее 0, и в отношении заходов на посадку с уходом на второй круг в
соответствии с RNP меньше чем 1,0.
Резолюция А37/11 Ассамблеи ИКАО призывает внедрить к 2016
году схемы заходов на посадку на основе PBN с вертикальным наведением (APV) и
использованием спутниковой системы функционального дополнения (SBAS) или
средств барометрической вертикальной навигации (Baro-VNAV) либо, при отсутствии
вертикального наведения, с помощью только бокового наведения на большинство
концов ВПП, оснащенных для посадки по ППП. Как следствие этой резолюции, во
всем мире возрастающими темпами публикуются схемы захода на посадку на основе
PBN, многие из которых предусматривают вертикальное наведение.
4. Внедрение PBN в России
Деятельность ИКАО направлена на координацию процессов
глобального планирования в поддержку глобальной системы ОрВД основанной на
технологии концепции систем CNS/АТМ. Для достижения прогресса в деле внедрения
систем CNS/АТМ ИКАО разработала «Глобальный аэронавигационный план» (Doc 9750).
В данном документе приняты 23 инициативы, которые представляют собой варианты
усовершенствования аэронавигационной системы, реализация которых приводит к
непосредственному улучшению характеристик. Государства и регионы должны
выбирать те инициативы, которые отвечают рабочим целям, с помощью
аналитического процесса, учитывающего конкретные потребности государства,
региона, однородного района ОрВД или основного потока движения.
Для обеспечения интеграции системы ОрВД России в мировую
глобальную систему требуется незамедлительное применение методов глобального
аэронавигационного планирования. Одна из инициатив плана уже была успешно
реализована на территории Российской Федерации. В ноябре 2011 года в Восточной
части Европы была принята система сокращенных минимумов вертикального
эшелонирования ИКАО. Другим не менее важным пунктом остается навигация на
основе характеристик. Согласно документу Doc9750 «Глобальный
аэронавигационный план», реализация концепции навигации на основе характеристик
приведет к расширению пропускной способности и повышению эффективности за счет
сокращения минимумов эшелонирования, в результате чего преимущество получат те
эксплуатанты воздушных судов, которые установят оборудование, отвечающее
требованиям к эксплуатационным характеристикам. Концепция PBN также обеспечит
повышение уровня безопасности полетов, в частности при заходе на посадку, за
счет уменьшения количества столкновений исправных воздушных судов с землей.
Внедрение PBN представляет собой сложный и долгий процесс, но
необходимый для интеграции в систему CNS/ATM. Рассмотрим, какие меры уже были приняты в нашей
стране на пути к PBN.
В постановлении правительства «Об утверждении Концепции
модернизации и развития Единой системы организации воздушного движения
Российской Федерации» от 2000 г.
было определено необходимое условие интеграции в CNS/ATM, заключающееся в
переходе от существующей структуры Единой системы к системе более высокого
уровня - федеральной аэронавигационной системе (АНС). В АНС предполагается
объединить службы и системы, задействованные в авиации, для лучшей координации
их деятельности в целях безопасности и эффективности воздушного движения.
В постановлении также говорилось о необходимости
корректировки Федеральной целевой программы «Модернизация Единой системы
организации воздушного движения Российской Федерации, с учетом новых целей и
мероприятий. В 2008 году была утверждена новая Федеральная целевая программа на
2009-2015 годы. Её целью стало повышение безопасности полетов и эффективности
использования воздушного пространства за счет модернизации Единой системы ОрВД
Российской Федерации путем создания и развития Аэронавигационной системы. Одно
из основных мероприятий программы - переход к современным технологиям
организации воздушного движения, основанным на внедрении средств и систем в
соответствии с Концепцией CNS/ATM.
Дальнейшее развитие идея АНС получила в «Концепции создания и
развития Аэронавигационной системы России». В ней были определены основные
ограничения и недостатки действующей ЕС ОрВД и необходимые меры по их
устранению, в их числе полный переход к перспективным техническим средствам и
технологиям, обеспечение автоматизированного взаимодействия всех основных
функциональных компонентов аэронавигационной системы, а также широкое внедрение
метода «свободных полетов» (в долгосрочном плане, до 2025 года).
В 2010 году был опубликован «План внедрения навигации,
основанной на характеристиках, в воздушном пространстве Российской Федерации»,
включающий поэтапную стратегию внедрения PBN до 2022 года. План был
разработан по международному образцу и представлен на 37 сессии Ассамблеи ИКАО.
В плане приводится анализ факторов, связанных с особенностями
применения PBN в воздушном пространстве Российской Федерации.
Согласно прогнозу, приведенному в плане, интенсивность
воздушного движения будет расти около 6% в год на протяжении последующих 5-7
лет. Этот рост потребует модернизации инфраструктуры системы организации
воздушного движения (ОрВД) и улучшений процедур ОрВД, в том числе на основе
PBN.
Приводится характеристика навигационного поля Российской
Федерации: «Навигационное поле в районе аэродромов характеризуется наличием
поля VOR/DME в ряде международных аэродромов, аэродромов федерального значения
и аэродромах с высокой интенсивностью воздушного движения. Кроме этого,
практически все аэродромы Российской Федерации оснащены NDB, расположенных на
продолжении осевой линии ВПП, что позволяет осуществлять неточный заход на
посадку с использованием двух NDB. Для осуществления точных заходов на посадку
практически все международные аэропорты оснащены системами ILS. Кроме этого,
системами ILS оснащены аэропорты федерального значения и ряд крупных
аэропортов». К сожалению, данные системы не обеспечивают точность, требуемую
для реализации спецификаций PBN, используемых в районе аэродрома.
Точность при использовании двух дальномеров DME составляет
около 0,5 NM, что позволяет использовать навигационную инфраструктуру типа
DME/DME для RNAV-1. Однако в настоящее время использование DME/DME для процедур
RNAV в Российской Федерации пока не используется. Предполагается в ближайшее
время установить необходимое количество DME для использования метода DME/DME в
аэропортах Московской воздушной зоны (Домодедово, Шереметьево, Внуково) и ряде
других крупных международных аэропортах. [12]
На основе анализа в плане предлагается внедрить на территории
России следующие спецификации: RNAV-10 для полетов в удаленных континентальных
районах, RNAV-5 для полетов по маршрутам, RNAV-1 для полетов в районе
аэродрома.
Стратегией внедрения PBN в Российской Федерации предусмотрено
три этапа: краткосрочный - 2009-2012 годы; среднесрочный - 2013-2017 годы;
долгосрочный - 2018-2022 годы.
Согласно плану к 2012 году в районе аэродрома должны быть
выполнены следующие задачи:
- Внедрение полетов в аэропортах (до 5%
немеждународных гражданских аэропортов и до 20% международных аэропортов) по
SID/STAR в условиях RNAV-1 для ВС, оборудованных DME/DME и ГНСС.
- Внедрение RNP APCH на основе Baro-VNAV в
международных аэропортах (до 20% международных аэропортов).
- Внедрение в ряде аэропортов (до 30
аэропортов, в том числе 20 международных) точных заходов на посадку по I
категории ИКАО для ВС, оборудованных аппаратурой ГНСС/GBAS. [12]
По состоянию на цикл AIRAC 1203 (8 марта 2012 г.) схемы прибытия
RNAV на основе ГНСС
опубликованы для 10 международных аэродромов России, а схемы вылета только для
трех, что пока не составляет 20%, как намечено в плане. Что касается схем
захода на посадку, то в России широко реализуются пока только схемы неточного
захода по GNSS, разработанные для 12 международных аэропортов, разработка
которых почему-то не включена в план.
Схемы захода на посадку RNP APCH на основе Baro-VNAV разработаны только для
аэродрома Минеральные Воды и опубликованы в сборнике АНИ №11 ЦАИ. (в АИПе РФ
данные схемы опубликованы как LNAV). Есть несколько замечаний к данным схемам.
Во-первых, на них опубликован градиент снижения, а не угол траектории в
вертикальной плоскости (VPA), что является предпочтительным. Также не
указана минимальная температура, для которой разрешены полеты с использованием Baro-VNAV.
В 2012 году схемы Baro-VNAV планируется разработать для аэродромов
Хабаровск, Казань, Санкт-Петербург, Сургут, Салехард.
По данным из материала «Об итогах работы Росавиации в 2011
году и основных задачах на 2012 год» на территории России установлено 37
комплектов оборудования GBAS, но до сих пор не введены в эксплуатацию из-за
отсутствия необходимой аппаратуры летного контроля. Используется лишь одна
система установленная в аэропорту Тюмень (Рощино) и уже опубликованы
соответствующие схемы. Поэтому на данный момент внедрение точных заходов на
посадку по I категории ИКАО ГНСС/GBAS, к сожалению, также не соответствует
намеченным планам.
В период 2013-2017 годы планируется внедрение заходов на посадку
на основе APV при использовании SBAS (в случае, если российская система SDCM
сможет поддерживать эти процедуры). По словам Федерального космического
агентства РОСКОСМОС, дальнейшее развертывание космических аппаратов «Луч-5Б» и
«Луч-5В» будет осуществляться до 2014 года, а работы по сертификации системы
для применения авиационными потребителями на территории РФ запланированы после
полного развертывания орбитального сегмента в рамках ФЦП «Поддержание, развитие
и использование системы ГЛОНАСС на 2012-2020 годы». Но опять, же требуется
время, чтобы разработать и опубликовать схемы для SBAS.
В итоге к 2022 году, согласно плану намечается
полное развертывание инфраструктуры ГНСС в воздушном пространстве Российской
Федерации. Рассчитано внедрить:
- RNAV-1 на основе DME/DME и ГНСС (до 100%
международных аэропортов)
- RNP APCH на основе Baro-VNAV (до 100%
международных аэропортов, где это необходимо)
- APV при использовании SBAS (в случае, если
российская система SDCM сможет поддерживать эти процедуры)
- ГНСС/GBAS по I категории (до 100
аэропортов, в том числе все международные)
Планируется также начать внедрение заходов на
посадку по II/III категориям ИКАО с использованием GBAS, заходов на посадку
типа RNP AR APRCH и постепенно отказаться от традиционных схем маневрирования.
Если темпы развития останутся прежними, сложно
представить, что данные планы осуществимы в столь короткий срок.
Резолюция А37/11 Ассамблеи ИКАО кроме схем заходов на посадку
на основе PBN с вертикальным наведением (APV) призывает внедрить схемы захода с
помощью только бокового наведения. Если внедрение схем захода на посадку с
вертикальным наведением и точного захода по GBAS пока не удается
осуществить в срок, почему бы ни пересмотреть план и не включить в него схемы
бокового наведения LNAV по GNSS, которые уже имеются для 12 аэропортов?
На основе данного плана 9 ноября 2010 года был издан приказ
«Об утверждении типов требуемых навигационных характеристик для маршрутов
зональной навигации». Его целью было утвердить на территории России спецификации
RNAV-10, RNAV-5, RNAV-1. Текст приказа вызвал
волну критики в авиационных кругах, вследствие своего несоответствия
терминологии Руководства по PBN ИКАО, а также отсутствия точных указаний, как и
где эти спецификации применять, что делает данный документ бесполезным.
С 1994 г. в России разработчики схем
использовали документ: «Руководство по построению аэродромных схем и
определению безопасных высот пролета препятствий» В 2000 г. Руководство было
дополнено п. 5.7.1 Заход на посадку методом зональной навигации, основанной на
спутниковой навигационной системе (GNSS). С переходом мировой авиации на
применение концепции PBN, изменился подход к построению зон учета препятствий,
набор спецификаций. В этой связи положения п. 5.7.1 Руководства устарели для
применения построения схем GNSS. [17]
ФГУП ГосНИИ «Аэронавигация» разработала
пока неутвержденный нормативно-правовой документ - «Методика по построению схем
маневрирования…» (в трех томах: «…с применением традиционных радиотехнических
средств», «…при использовании методов зональной навигации» и «…на основе RNP AR APCH»). Данная методика, по
сути, является сокращенным вариантом документов ИКАО «Правила
аэронавигационного обслуживания. Производство полетов воздушных судов»
(PANSOPS) Doc 8168 и «Руководства по построению схем на основе
санкционированных требуемых навигационных характеристик (RNP AR)» (Doc 9905). Все государства
(кроме США, которые используют TERPS) активно применяют Doc 8168 и Doc 9905, и никто не
разрабатывает собственные инструкции и методики. Более того под документы ИКАО
созданы соответствующие программные продукты. Утверждение новой методики
приведет к невозможности использования имеющегося дорогостоящего
специализированного программного обеспечения для проектирования аэродромных
схем. Специалисты по построению схем обученные по PANSOPS должны будут заново
изучать новую методику, анализировать разницу между двумя документами. Doc 8168
имеется на русском языке и многие разработчики схем в настоящее время
руководствуются именно этим документом.
Внедрение PBN должно обеспечиваться
соответствующей навигационной инфраструктурой, представляющей собой
соответствующую комбинацию ГНСС и традиционных навигационных средств наземного
базирования, и соответствующим ей бортовым навигационным оборудованием,
состоящим из комбинации бортового оборудования спутниковой навигации,
автономной бортовой системы навигации (например, инерциальная навигационная
система) и других традиционных средств навигации.
Больших высот достигло развитие
отчественных спутниковых систем, на которое уделяется весомая часть госбюджета.
В гражданской авиации Российской Федерации принята концепция совместного
использования существующих орбитальных группировок GPS и ГЛОНАСС. В 2011 году
завершена ФЦП «Глобальная навигационная система», утвержденная постановлением
Правительства Российской Федерации от 20 августа 2001 г. №587.К 2011 году
обеспечено доведение орбитальной группировки навигационных космических
аппаратов системы ГЛОНАСС до штатного состава (с 7-ми в 2002 г. до 24 КА) и её
поддержание за счёт запуска модернизированных космических аппаратов
«Глонасс-М», начато создание орбитального резерва. Таким образом, создана
российская космическая навигационная система, которая обеспечивает глобальную
непрерывную навигацию на поверхности Земли и на высотах до 2000 км и на текущий
момент времени сопоставима по основным характеристикам с американской системой
GPS. Доступность навигационного поля системы ГЛОНАСС в настоящее время
составляет:
- на территории России -
100%;
- глобально - 100%.
Для сравнения, в 2002 году глобальная
доступность навигационного поля системы ГЛОНАСС составляла 18%.
Точность системы ГЛОНАСС обеспечена на
конкурентоспособном уровне - со среднеквадратическим отклонением 5,6 м, что
удовлетворяет требованиям большинства потребителей. Для сравнения: в 2006 г.
эта величина составляла 35-50 м.
В 2011 году начались лётные испытания
навигационного космического аппарата нового поколения «Глонасс-К», который
обеспечивает решение задач на качественно новом уровне. [18] Была разработана,
но ещё не утверждена «Инструкция по использованию глобальной навигационной
спутниковой системы в воздушном пространстве Российской Федерации».
Однако, за весь период внедрения
спутниковой навигации в гражданской авиации навигационными системами ГЛОНАСС/GPS
оборудовано по разным данным всего лишь 16% парка воздушных судов
отечественного производства. С 2010 года количество увеличилось всего на 3,6
процента (табл. 9).
Таблица 9. Уровень оснащения отечественных
ВС ГА аппаратурой спутниковой навигации GNSS (на 15.12.2010)
|
Класс ВС
|
Количество ВС
|
Уровень
оснащения в%
|
В эксплуатации
|
|
самолеты
|
908
|
121
|
13,3
|
|
вертолеты
|
961
|
111
|
11,6
|
|
по парку вс
|
1869
|
232
|
12,4
|
Тем не менее, совершенствуется и
разрабатывается новое бортовое оборудование спутниковой навигации (табл. 10). А
также готовятся к печати следующие документы: Квалификационные требования
КТ-229 «Бортовое оборудование ГНСС/SBAS», Квалификационные требования КТ-34-01
«Бортовое оборудование спутниковой навигации».
Процесс получения разрешений на полеты по PBN, несмотря на уже
имеющийся в документе Doc 9613 инструктивный материал, все еще не полностью
осознан не только в нашей стране, но и во многих государствах. Признание в
государстве утверждений, осуществленных за рубежом, не получило широкого
распространения. В последний вариант документа Doc 9613 включен дополнительный
инструктивный материал (руководство по эксплуатационному утверждению); в
настоящее время ИКАО разрабатывает краткий курс подготовки специалистов по
регулированию, и это дополняется учебно-методической разработкой по
компьютеризированному обучению. Решению этой проблемы будут способствовать
налаживание тесного сотрудничества между государствами и принятие крупными
авиационными государствами обязательств по согласованию процедур утверждения.
Таблица 10. Состояние разработки и
сертификации отечественного бортового оборудования спутниковой навигации GNSS (КИ - квалификационные
испытания, ПИ - предварительные испытания)
|
№
|
Наименование
АСН
|
Обозначение АСН
|
Разработчик
|
Подкласс по
КТ-34-01
|
Номер сертификата
или этап ОКР
|
|
1
|
Бортовой
приемник спутниковой навигации
|
БПСН-2
|
ЗАО «КБ «НАВИС»
|
С1
|
СГКИ-034-205-БПСН-2
от 03.08.2006 г.
|
|
2
|
Бортовое
оборудование спутниковой навигации
|
СН-4312
|
ЗАО «КБ «НАВИС»
|
А1, В1, С1
|
СГКИ-034-230-СН-4312
от 11.12.2007 г.
|
|
3
|
Бортовая многофункциональная
система
|
БМС-индикатор
|
ЗАО
«ВНИИРА-Навигатор»
|
А1, В1, С1
|
СГКИ-034-225-БМС-индикатор
от 15.08.2007 г.
|
|
4
|
Аппаратура
приема и преобразования дифференциальных данных
|
АПДД
|
ЗАО
«ВНИИРА-Навигатор»
|
КТ-253
|
СГКИ-034-226-АПДД
от 15.08.2007 г.
|
|
5
|
Спутниковый
приемоиндикатор
|
TSS
|
ЗАО «ТРАНЗАС»
|
А1, В1, С1
|
СГКИ-034-257-TSS
от 27.10.2009 г.
|
|
6
|
Бортовой
индикатор для обеспечения категорированной посадки
|
БМС-индикатор с
дифференциаль-ным режимом
|
ЗАО
«ВНИИРА-Навигатор»
|
Посадка по 1
категории ИКАО cовместно с АПДД
|
СГКИ-034-225-БМС-индикатор/Д01
от 10.12.2010 г.
|
|
7
|
Бортовая
многофункциональная система
|
БМС-2010
|
ЗАО
«ВНИИРА-Навигатор»
|
А1, В1, С1
|
Проводятся ПИ
|
|
8
|
Пульт -
вычислитель навигационный
|
ПВН
|
ОАО «КБ ПА»
|
А1, В1, С1
|
Проводятся ПИ
|
|
9
|
Интегрированная
инерциально-спутниковая навигационная система
|
НСИ-2000МТG
|
ЗАО «Лазекс»
|
В1
|
Проводятся ПИ
|
|
10
|
Бортовое
оборудование спутниковой навигации
|
СН-4312 с
дифференциаль-ным режимом
|
ЗАО «КБ Навис»
|
Посадка по
Iкатегории ИКАО совместно с АПДД
|
Проводятся КИ
|
Выводы
Подводя итоги данной работы, можно сделать следующие выводы:
. В России отсутствует четкая программа внедрения PBN,
квалифицированный персонал, а также знания и опыт эффективного регулирования
полетов по PBN наших авиакомпаний в воздушном пространстве другого государства.
Это препятствует возможности внедрения PBN в воздушном пространстве РФ.
. Не хватает нормативно-правовых документов
регулирующих внедрение PBN. План по внедрению PBN в РФ основан на прошлой
уже неактуальной резолюции, и не включает в себя внедрение схем заходов на
посадку на основе LNAV. Приказ Минтранса «Об утверждении типов требуемых
навигационных характеристик для маршрутов зональной навигации» не содержит
инструктивного материала по внедрению спецификаций, либо ссылок на руководящие
документы, не указывает конкретные районы, где эти спецификации утверждаются.
Также не утверждает спецификации для схем захода на посадку. Нет
согласованности в применении руководящих документов при построении схем
маневрирования в районе аэродрома.
. Успешно развивается Российская космическая
навигационная система, обеспечивающая глобальную навигацию доступную для всех
пользователей, в том числе авиации. С каждым годом повышается уровень её
точности. Разрабатывается новое бортовое оборудование, наземные и спутниковые
системы функционального дополнения. К сожалению, данный потенциал пока остается
практически невостребованным из-за медленного хода разработки соответствующих
схем и оснащения парка ВС.
. Количество дальномерных систем в районах аэродромов
не позволяет устанавливать схемы основанные на DME/DME.
. Выполнение требований Резолюции Ассамблеи ИКАО идет
медленным ходом. В данный момент разработка схем захода на посадку с
вертикальным наведением находится практически на нуле. Так как система СДКМ в
РФ пока находится в стадии разработки, целесообразно уделить внимание созданию
схем барометрической навигации, совмещенных с DME либо GNSS. Тем более почти
все ВС иностранного производства уже оборудованы соответствующими системами для
барометрического наведения.
. Внедрение PBN предусматривает широкий диапазон
специализаций, начиная от проектировщиков воздушного пространства и схем
полетов до специалистов по регулированию, картографов, полетных диспетчеров,
диспетчеров УВД и пилотов. До настоящего времени самой крупной проблемой было
обеспечение единого глобального понимания концепции PBN и методов ее
реализации. Ожидается, что такой спрос в области подготовки и ознакомлении
персонала не уменьшится, пока не пройдет несколько лет после введения PBN в
качестве стандартного метода навигации. Внедрение новых методов навигации
означает наличие постоянной потребности в обновлении и усовершенствовании
стандартов, инструктивного материала и учебно-методических разработок.
. Остается проблема отсутствия упорядоченного процесса
выдачи разрешений на производство полетов по PBN, что вызывает большую
озабоченность у авиакомпаний.
На основе данных выводов я бы хотела выдвинуть следующие рекомендации:
. Для решения комплекса вопросов по внедрению PBN необходимо создать
рабочую группу или иметь соответствующее структурное подразделение, которое
должно курировать вопросы внедрения утвержденных спецификаций, качества
аэронавигационной информации, получения соответствующего разрешения для
авиакомпаний на производство полетов по PBN от местных авиационных властей.
. Следует пересмотреть план внедрения PBN в РФ и включить в него
внедрение захода на посадку с боковым наведением по GNSS. Также необходимо
продолжить разработку таких схем и схем с вертикальным наведением (Baro-VNAV), в первую очередь
на аэродромах, не оборудованных системами точного захода на посадку, либо там,
где системы, выработали свой ресурс. Следует строго руководствоваться
положениями PANSOPS, и не допускать ошибок и недочетов в опубликовании.
. Необходимо издать методический материал, как
приложение к приказу «Об утверждении типов требуемых навигационных
характеристик для маршрутов зональной навигации, основанный на Руководстве по PBN, Doc 9613. Он должен включать
четкие инструкции по установлению утвержденных навигационных спецификаций RNP 10, RNAV 5, RNAV 1, описание границ их
применения, определение возможностей навигационного оборудования и содержание
программ подготовки летного и диспетчерского составов.
. Провести анализ согласно положениям Руководства по PBN (том I, часть В) и выбрать и
утвердить спецификации PBN для схем заходов на посадку для конкретных
аэродромов РФ, учитывая все эксплуатационные требования и требования
пользователей воздушного пространства. Также подготовить методический материал
с четкими указаниями границ и способов применения.
. Стоит отказаться от разработки собственных методик и
инструкций по построению схем зональной навигации. Необходимо официально
утвердить и активно применять при разработке схем, признанные во всем мире
документ ИКАО 8186, PANSOPS, «Производство полетов воздушных судов» и документ
9905, «Руководства по построению схем на основе санкционированных требуемых
навигационных характеристик (RNP AR)».
. Следует обеспечить наличие необходимой наземной
инфраструктуры для навигации и организации воздушного движения (ОрВД), в виде
систем DME для смягчения последствий потенциальной потери обслуживания,
обеспечиваемого глобальной навигационной спутниковой системой (GNSS).
. Необходимо далее продолжать развитие систем
наземного функционального дополнения ЛККС на территории РФ, как наиболее
перспективного и точного оборудования для захода на посадку. Следует
разработать аппаратуру летного контроля, провести испытательные работы системы,
пройти сертификацию для применения авиационными потребителями, разработать
схемы захода на посадку по GBAS, начиная с тех аэропортов для которых ещё нет
систем точного захода на посадку, либо с тех чьи системы, выработали свой
ресурс.
. Необходимо организовать подготовку персонала и
провести ознакомительные мероприятия в глобальном масштабе. Это означает
постоянную потребность в инструктивном материале, семинарах, симпозиумах,
учебно-методических разработках по компьютеризированному обучению и формальных
курсах для обеспечения того, чтобы требования и стандарты были поняты в полной
мере и надлежащим образом выполнялись.
Список литературы
1. «Руководство
по навигации, основанной на характеристиках (PBN)», Doc 9613 AN/937, Монреаль, ИКАО,
издание третье, 2008. - 304 с.
2. «Руководство
по построению схем на основе санкционированных требуемых навигационных
характеристик (RNP AR)», Doc 9905 AN 471, Монреаль, ИКАО, издание первое, 2009, - 99
с.
. «Правила
аэронавигационного обслуживания, производство полетов воздушных судов, том II: построение схем
визуальных полетов и полетов по приборам», Doc 8168 OPS 611, Монреаль, ИКАО,
издание пятое, 2006. - 880 с.
. Вовк
В.И., Липин А.В., Сарайский Ю.Н. «Зональная навигация», учебное пособие,
Санкт-Петербург, 2004. - 128 с.
. Ю.И.
Либерман, А.В. Липин, Ю.Н. Сарайский «Аэронавигация» глава: Применение
спутниковых навигационных систем, учебное пособие, Санкт-Петербург, 2011.-69 с.
6. «Стандарты
аэронавигационной информации», КТ201А, RTCA, Inc. Document No.
RTCA/DO-201A, 2007, -176 с.
7. «Глобальный
аэронавигационный план применительно к системам CNS/ATM», Doc 9750 AN963, Монреаль, ИКАО,
издание третье, 2007, -139 с.
. Журнал
ИКАО, выпуск 65, №6, Монреаль, ИКАО, 2009 - 40 с.
. Ассамблея
37-я сессия, Монреаль 28 сентября - 8 октября 2010, Техническая комиссия,
доклад, Doc 9954 A37TE, 2010. - 90 с.
10. «Навигационные
радиотехнические средства», учебное пособие, Санкт-Петербург, 2008. - 94 с.
11. «Радионавигационный
план российской федерации: Основные направления развития радионавигационных
систем и средств», Москва, 2008. -83 с.
12. «План
внедрения навигации, основанной на характеристиках, в воздушном пространстве
Российской Федерации», Москва, 2010., -12 с.
13. «Двенадцатая
аэронавигационная конференция, PBN при полетах в районах аэродромов и заходах
на посадку», рабочий документ, Монреаль, ИКАО, 2012.
14. НППФ
«Спектр», «Перспективы внедрения и развития системы функционального дополнения
наземного базирования (GBAS)», презентация, 2011.
15. «Об
утверждении типов требуемых навигационных характеристик для маршрутов зональной
навигации», приказ от 9 ноября 2010 года №242, Министерство транспорта
российской федерации, Москва, 2010, -2 с.
16. «Система
организации воздушного движения России: разбор полетов», статья, www.ato.ru,
2012.
17. Липин
А.В., «Трудные шаги внедрения GNSS Approach», статья, www.aviaglobus.ru, 2012.
. ФЦП
«Поддержание, развитие и использование системы ГЛОНАСС на 2012-2020 годы»,
Москва, 2012.