Радиотехническая аппаратура высокоточного контроля геометрической формы плотин гидроэлектростанций
Содержание
Введение
.
Обоснование радиотехнического метода измерений точных расстояний
.
Основные узлы точного дальномера
.1
Обоснование энергетики канала
.2
Функциональная схема системы фазовой автоподстройки частоты...
.3
Фазовый детектор
.4
Синхронный детектор
.5
Оценка основных параметров ФАПЧ
.6
Интегратор
.7
Генератор управляемый напряжением
.
Определение абсолютного значения дальности
.
Технико-экономическое обоснование
.
Безопасность и экологичность разработки
.1
Действие ЭМП на организм человека
.2
Нормирование уровня ЭМП
.3
Расчет ППЭ
Заключение
Список
использованных источников
Введение
Гидротехнические сооружения гидроэлектростанций
представляют собой объекты повышенной опасности, поэтому постоянное наблюдение
за их состоянием, контроль геометрических и физико-механических параметров
минимальное необходимое требование, обеспечивающее безопасность и надежность
работы этих сооружений в течение всего эксплуатационного срока.
Естественно, что крупные строительные
конструкции нуждаются в оперативных оценках их состояния по большому числу
физических параметров и по многим контрольным точкам, разнесенным в
пространстве и времени.
Системно подобная задача может быть решена лишь
при комплексном внедрении автоматизированных средств контроля и измерений с
использованием современных достижений вычислительной техники, радиоэлектроники
и связи.
Между тем сегодня многие гидротехнические
сооружения крупных гидроэлектростанций России, используют технику наблюдения,
относящуюся к поколению 30-летней давности по состоянию на начало их
строительства, что не отвечает требованиям безопасности работы этих сооружений
с учетом старения во времени материалов и деталей строительных конструкций.
Одним из параметров контроля и мониторинга
гидротехнических сооружений гидроэлектростанций является оценка прочностных
характеристик, по геометрической форме плотины (створа), для которой при
воздействии различных внешних факторов (чередование времен года, изменение
уровня водохранилища, сейсмических воздействий и др.) необходимо измерять
перемещение отдельных участков гребня плотины. Существует несколько методов
контроля геодезического створа сооружений гидроэлектростанций, которые включают
в себя различные варианты реализаций:
· струнный створ - закладывается
внутри плотины вдоль галерей и представляет собой подвешенную на береговых
анкерах стальную струну, защищенную асбестовым трубопроводом. Для снижения
провисания, струна подвешивается на поплавках через определенное расстояние,
порядка 20 метров. Координаты смещения стенки трубы относительно струны
измеряются вручную или с помощью оптических, индуктивных и емкостных датчиков,
расположенных вдоль плотины. Используется на большинстве гидроэлектростанций;
· оптический створ - представляет
собой метод оптической пеленгации точеных источников света (лазеров, и т.п.),
расположенных в дискретных точках вдоль кромки плотины;
· дифференциальный створ - если
плотина состоит из нескольких десятков блоков (плотина Зейской ГЭС),
относительное смещение которых под напором воды определяет в целом контур
верхней кромки, то возможным вариантом измерительного створа может быть способ
дифференциального измерения относительных смещений строительных блоков с
использованием датчиков перемещения;
· радиотехнический створ:
разностно-дальномерный метод - в этом методе
вдоль створа устанавливаются маломощные радиомаяки (радиоточки), а их
координаты пеленгуются с берега фазовым радиопеленгатором в виде двух
разнесенных по горизонтали приемных антенн и фазометра;
дальномерный метод - по этому варианту прием сигналов
радиомаяков осуществляется в одной точке. При этом измеряется разность фаз
между опорным сигналом местного гетеродина приемника и принимаемого сигнала от
выбранного радиомаяка.
Системы глобального позиционирования ГЛОНАСС и GPS
пока не отвечают заданным требованиям точности. В перспективе с применением
методов накопления и обработки информации со спутников,
контрольно-корректирующих базовых станций и дополнительных устройств
потребителя, станет возможным достигнуть высокой и достаточной для заданной в
ТЗ точности измерений. В настоящее время, использование дифференциальной
поправки, основанной либо на геостационарных спутниках, либо на наземных
базовых станциях, даже с накоплением дает точность в десятки сантиметров (10-50
см).
Наиболее перспективным является радиотехнический
метод. Как будет показано ниже, при рассмотрении предлагаемого метода, с его
помощью можно достигнуть малых значении инструментальной погрешности, что
позволит более детально и быстро следить за состоянием тела плотины, накапливать
статистические данные о створе, оценивать риски и реагировать на них до
происшествия возможных чрезвычайных ситуаций, то есть предсказывать поведение
створа.
Целью работы
является разработка радиотехнического метода и аппаратуры высокоточного
контроля геометрической формы плотин гидроэлектростанций и включает в себя, в
том числе, следующие задачи исследования:
. Обоснование радиотехнического метода
измерений точных расстояний;
. Функциональная схема системы фазовой
автоподстройки частоты;
. Поиск схемотехнических решений;
. Оценка основных параметров ФАПЧ;
. Безопасность и экологичность
разработки;
. Технико-экономическое обоснование
Практическая значимость и внедрение
результатов исследований:
Проведение вышеперечисленных исследований
позволит создать высокоточный метод измерения расстояния (смещений) и
оборудование контроля над створами плотин или другими малоподвижными объектами
которым требуется мониторинг и оценка их прочностных параметров.
1. Обоснование радиотехнического
метода измерений точных расстояний
Для оценки прочностных характеристик и
мониторинга геометрических параметров плотин гидроэлектростанций, при
воздействии внешних факторов, необходимо измерять перемещение отдельных
участков гребня плотины по всей длине. Одним из перспективных способов
измерения перемещения гребня плотины может быть радиотехнический метод,
основанный на измерении задержки радиосигнала от опорной точки расположенной
ниже плотины на 0,5÷1 км, где
расположена приемопередающая антенна, до контрольных точек на гребне плотины, в
которых установлены отражающие антенны.
Реализация этого метода требует достаточно
высокой точности измерения величины задержки сигнала. Так, для обеспечения
точности измерения расстояния в 1 мм и точнее необходимо измерять задержку
радиосигнала с погрешностью менее 3 пс, что соответствует погрешности измерения
фазы радиосигнала частотой 1ГГц не более 1,2º.
Достижение инструментальной точности в 1 мм
стандартными средствами радиотехнических методов дальнометрии добиться очень
тяжело, поэтому предлагаемый метод специально разрабатывался для заданных
требований точности, и не имеет выявленных аналогов при проведении патентного
поиска.
Рассматриваемый метод условно разделим на две
части:
· определение абсолютного расстояния
между антеннами, предполагается использовать проверенные и отработанные
принципы спутниковых навигационных систем (ГЛОНАСС/GPS),
а именно измерение задержки при помощи шумоподобных сигналов псевдослучайной
последовательности для определения дальности. Синхронизацию по времени обеспечит
система ГЛОНАСС/GPS;
· принцип измерения приращения
дальности, осуществляется приращением частоты первичного сигнала
радиоизлучения, при условии постоянной фазы сигнала принимаемого от объекта
переизлучения, в точке излучения первичного радиосигнала. Это условие
выполняется таким изменением частоты первичного радиоизлучения, чтобы разница
фаз принимаемого сигнала от объекта переизлучения и первичного излучения была
равна нулю.
В данной работе мы более подробно остановимся на
второй части - принципе измерения приращении дальности, за счет которого как
раз и обеспечивается заданная в ТЗ точность.
Реализация принципа измерения приращения
дальности осуществляется генератором частоты первичного радиоизлучения
управляемого устройством фазовой автоподстройки частоты (ФАПЧ) по сигналу
рассогласования принимаемого от объекта переизлучения.
Структурная схема измерителя приращения
представлена на рис. 1.
Рисунок 1 - Структурная схема
измерителя приращения: ГУН - генератор управляемого напряжения; ФД - фазовый
детектор; УС - усилитель; СД - синхронный детектор; И - интегратор напряжения
рассогласования; Ч - частотомер; К - коммутатор переизлучающей антенны
установленной на точке переизлучения; ЭВМ - процессор обработки результата наблюдения.
Генератор управляемого напряжения
(ГУН) подает на излучающую антенну синусоидальный сигнал, длина волны которого
подобрана так, чтобы между излучающей антенной и отражающей укладывалось целое
число длин волн, а сама длина волны была больше чем максимальное смещение
плотины, то есть по ТЗ больше 100 мм. Следовательно, частоту ГУН следует
выбрать в пределах 1÷3
ГГц.
На плотине предполагается
использовать определенное количество отражающих антенн установленные через
заданные промежутки расстояния. Выбор отражающей антенны происходит с помощью
устройства управления, которое опрашивает антенны соответствующим двоичным
кодом по отдельному каналу связи.
Двоичный код от управляющего
устройства, через отдельный канал связи, поступает на коммутационный блок
отражающей антенны и модулирует сигнал, пришедший по главному каналу связи от
приемопередающей антенны, служит для подтверждения работы выбранной отражающей
антенны.
Коммутатор, получив этот двоичный
код, будет изменять фазу излучаемого сигнала главного канала для определения
приращения дальности на 180º по меандру. Изменение фазы в
коммутирующем блоке необходимо для упрощения и возможности реализации
устройства усиления сигнала после фазового детектора приемника, так как на
выходе фазового детектора появится переменное напряжение. Коммутатор будет
представлять собой устройство замыкания и размыкания антенны на землю.
Измеряемое расстояние (впоследствии
измеряемое приращение расстояния) может быть определено по полной фазовой
задержке сигнала излучения прошедшего путь от фазового центра излучающей
антенны (ФЦИ) до фазового центра отражающей антенны (ФЦО), установленной на
точке наблюдения, и обратно.
Таким образом, измеряемое расстояние
D равно:
 ,(1)
,(1)
где с - скорость распространения
электромагнитной волны;
f - частота
ГУН;
 - полная фазовая задержка;
- полная фазовая задержка;
 - длина волны;
- длина волны;
 ;
;
n = целая
часть  .
.
Работа ФАПЧ при интегральном законе
регулирования обеспечивает значение  за счет изменения частоты ГУН
за счет изменения частоты ГУН  , поэтому
согласно (1) получаем:
, поэтому
согласно (1) получаем:

 (2)
(2)
откуда, приращение дальности d равно:
 ,(3)
,(3)
так как  .
.
Обобщенно, последнее выражение
представим в виде:
 (4)
(4)
Таким образом, при частоте
радиоизлучения 2 ГГц ( ) и
дальности 1 км, приращение частоты генератора с ФАПЧ будет:
) и
дальности 1 км, приращение частоты генератора с ФАПЧ будет:
 ,(5)
,(5)
или на 1 мм приращения расстояния d будет
приращение частоты  = 2 кГц, что
дает нам максимальное значение перестройки ГУН равное ±200 кГц при центральной
частоте ГУН 2 ГГц.
= 2 кГц, что
дает нам максимальное значение перестройки ГУН равное ±200 кГц при центральной
частоте ГУН 2 ГГц.
Чтобы добиться значений в пределах
допустимой погрешности полосу частот выходного сигнала ГУН ограничим
необходимым максимальным значением перестройки.
Для заданной в ТЗ точности
определения расстояния 1 мм, ФАПЧ должен обеспечивать точность измерения фазы с
погрешностью:
 ,(6)
,(6)
что для средней частоты ГУН равной 2
ГГц составляет:
 (7)
(7)
Частотомер не придется разрабатывать
специально, так как параметры известных серийных частотомеров удовлетворяют
требованиям инструментальной точности измерения. Частотомер Ч3-85/3R имеет
точность измерения частоты  Гц за период 20 лет, что составляет
погрешность 5 Гц. Составляющая инструментальной погрешности измерения
приращения d за счет
погрешности частотомера не превысит 5 мкм, что предопределяет перспективность
измерений приращения дальности радиоволновым методом. Достигается такая
точность использованием встроенного рубидиевого стандарта частоты. При
необходимости достижения долговременной стабильности опорного источника
Гц за период 20 лет, что составляет
погрешность 5 Гц. Составляющая инструментальной погрешности измерения
приращения d за счет
погрешности частотомера не превысит 5 мкм, что предопределяет перспективность
измерений приращения дальности радиоволновым методом. Достигается такая
точность использованием встроенного рубидиевого стандарта частоты. При
необходимости достижения долговременной стабильности опорного источника  возможна
синхронизация рубидиевого генератора по сигналам систем ГЛОНАСС/GPS с помощью
внешнего или встраиваемого в частотомер приемника. Синхронизация осуществляется
раз в сутки путем усреднения, что позволяет избежать увеличения кратковременной
нестабильности рубидия.
возможна
синхронизация рубидиевого генератора по сигналам систем ГЛОНАСС/GPS с помощью
внешнего или встраиваемого в частотомер приемника. Синхронизация осуществляется
раз в сутки путем усреднения, что позволяет избежать увеличения кратковременной
нестабильности рубидия.
Другой существенной составляющей
погрешности измерения приращения расстояния является многолучевость
распространения радиосигнала, которая обусловлена переотражением радиосигнала
от окружающей обстановки, в частности отражение от поверхности воды на нижнем
бьефе плотины, от меняющейся береговой обстановки и прочих посторонних
отражающих объектов. Для снижения этой составляющей погрешности необходимо
сужать диаграмму направленности антенны, что приводит к соответствующему
увеличению габаритов антенн.
Для рабочих частот 1÷3 ГГц реально
реализовать антенны с коэффициентом усиления 20÷23 дБ, что
соответствует ширине диаграммы направленности порядка 30º. Посчитаем
приблизительно усиление антенны
 (8)
(8)
Переотражающие объекты, находящиеся
за пределами диаграммы направленности приемопередающей и переизлучающей
антенны, будут создавать мешающие сигналы, напряжение в которых в 100 и более
раз меньше напряжения основного канала, что приведет к изменению фазы
регистрируемого сигнала в пределах ±1º. Согласно соотношению (1) при
диапазоне измерения  мм на
частоте 2 ГГц приращение дальности
мм на
частоте 2 ГГц приращение дальности  при приращении фазы сигнала на ±1º будет:
при приращении фазы сигнала на ±1º будет:
 (9)
(9)
Погрешность измерения приращения
дальности обусловленная многолучевостью радиоканала определяется шириной
диаграммы направленности антенн и может быть уменьшена увеличением частоты или
увеличением размеров антенны.
Многолучевость подавляется за счет
уменьшения ширины диаграммы направленности антенны. Отраженные сигналы,
пришедшие от других объектов, подавляются антеннами в 100 раз, так как
коэффициент усиления антенны больше 20 дБ.
Следует учитывать, также
составляющую погрешности измерения приращения расстояния от изменения скорости
распространения радиоволны при изменении параметров атмосферы: температуры,
давления, влажности и прочих параметров. Эта составляющая однозначно входит в погрешность
измерения дальности, а значит и в погрешность измерения приращения дальности.
Учет этой погрешности может быть осуществлен введением одной или двух,
дополнительных отражающих антенн, установленных на берегу с известным
расстоянием между ними и приемопередающей антенной. Это делает известной
частоту ГУН для данных антенн, и если частота не будет таковой, то получаемая
программно разница между ними внесется процессором как поправка во все
измерения.
2. Основные узлы точного дальномера
2.1 Обоснование энергетики канала
Оценим требуемую мощность в излучающей антенне
для максимального расстояния прохождения сигнала.
Сигнал, излучаемый приемопередающей антенной,
отражается от пассивной отражающей антенны и приходит снова на приемопередающую
антенну.
Плотность потока мощности у отражающей антенны
будет:
 ,(10)
,(10)
где Gи -
коэффициент усиления приемопередающей антенны;
D -
расстояние от приемопередающей антенны до отражающей;
Pи - мощность
сигнала.
Мощность на отражающей антенне
будет:
 ,(11)
,(11)
где Gо -
коэффициент усиления отражающей антенны;
- длина волны.
Плотность потока мощности,
создаваемая отражающей антенной на приемопередающей, будет равна:
 ,(12)
,(12)
а мощность сигнала в
приемопередающей антенне:
 ,(13)
,(13)
где Gп= Gи -
коэффициент усиления приемопередающей антенны.
Для численной оценки мощности
сигнала на приемной антенне принимаем λ=0,15 м; Pи=0,1 Вт; Gо= Gи=23 дБ; D= 1000 м.
 (14)
(14)
2.2 Функциональная схема системы
фазовой автоподстройки частоты
Функциональная схема системы фазовой
автоподстройки частоты (ФАПЧ) показана на рисунке 2. Система стабилизирует
частоту подстраиваемого генератора (ПГ) по сигналу с высокостабильного
эталонного генератора (ЭГ).
Объектом управления в системе ФАПЧ
является ПГ, частота колебаний (или фаза) напряжения которого изменяется в
зависимости от напряжения, вырабатываемого управляющим элементом (УЭ), при этом
напряжение ПГ остается неизменным. Частота напряжения ПГ является выходным
сигналом системы ФАПЧ. На систему действует напряжение от эталонного генератора
с частотой ωэ, этот
сигнал является управляющим воздействием. Измерителем рассогласования является
фазовый детектор (ФД), выходной сигнал которого, является нелинейной
периодической функцией разности фаз сигналов подаваемых от ПГ и ЭГ. Сигнал с ФД
через фильтр нижних частот (ФНЧ) подается на УЭ, который перестраивает частоту
ПГ, приближая её к частоте ЭГ. В установившемся режиме в системе
устанавливается постоянная разность фаз между напряжениями uэ и uг, при этом
напряжение на выходе ФД также будет постоянным, в результате чего частота
сигнала с ПГ окажется равной частоте сигнала с ЭГ.
Рисунок 2 - Функциональная схема
ФАПЧ
Начальное рассогласование частот от
ЭГ и ПГ
 ,(15)
,(15)
где ωэ - начальная
частота сигнала ПГ.
После включения системы ФАПЧ частота
сигнала ПГ
 (16)
(16)
Составляющая ωгу возникает
из-за перестройки частоты ПГ и определяется выражением
 ,(17)
,(17)
где kг -
коэффициент передачи ПГ по частоте;
kуэ -
коэффициент передачи УЭ;
kД - коэффициент,
равный максимальному напряжению на выходе ФД;
φ - разность фаз напряжений ЭГ и
ПГ.
Для простоты принято, что ФНЧ
отсутствует и напряжение с ФД подается на УЭ. Величина
 (18)
(18)
имеющая размерность круговой
частоты, определяет максимальное допустимое рассогласование частот  , которое
может быть скомпенсировано в системе ФАПЧ, эту величину называют полосой
удержания системы. С учетом выражений (16) и (17) частота сигнала с ПГ (15)
оказывается равной
, которое
может быть скомпенсировано в системе ФАПЧ, эту величину называют полосой
удержания системы. С учетом выражений (16) и (17) частота сигнала с ПГ (15)
оказывается равной
 (19)
(19)
Разность фаз сигналов с ЭГ и ПГ
определяется выражением
 ,(20)
,(20)
где φ0 - начальное
значение разности фаз.
Из последнего выражения следует, что
 (21)
(21)
В установившемся режиме разность фаз
φ
- постоянная
величина, поэтому частота сигнала ПГ равна частоте сигнала ЭГ, т. е. ошибка
стабилизации частоты сигнала ПГ равна нулю.
Подставив в выражение (20) формулу
(18), получим нелинейное дифференциальное уравнение для системы ФАПЧ:
 (22)
(22)
Уравнение (21) является основным
дифференциальным уравнением системы ФАПЧ; из этого уравнения следует, что в
любой момент времени алгебраическая сумма разности частот  и
расстройки является постоянной величиной, равной начальному рассогласованию
частот сигналов ЭГ и ПГ.
и
расстройки является постоянной величиной, равной начальному рассогласованию
частот сигналов ЭГ и ПГ.
Для разрабатываемой системы
использование ЭГ и ФНЧ не потребуется, схема ФАПЧ (рис. 3) будет включать в
себя помимо ФД, так же синхронный детектор (СД) и усилитель переменного
напряжения (УС). Управляющим элементом будет интегратор (И).

Рисунок 3 - Функциональная схема
ФАПЧ
Так как сигнал очень слабый, то
после ФД будет стоять усилитель переменного напряжения, которое будет
создаваться на отражающей антенне при помощи коммутатора путем замыкания и
размыкания антенны на землю по заданной меандровой последовательности (коду),
которая также служит идентификатором отражающей антенны.
Синхронный детектор сравнивает
усиленное переменное напряжение с сигналом управляющим коммутатором и на выходе
получается разность фаз этих сигналов, которая идет на интегратор, а он в
управляет изменением частоты в ГУН.
2.3 Фазовый детектор
Фазовым детектором (ФД) называется
устройство, служащее для создания напряжения, изменяющегося в соответствии с
законом изменения фазы входного напряжения. Если на вход ФД действует
напряжение
 ,(23)
,(23)
то продетектированное напряжение
 (24)
(24)
Положим, на входе ФД действует
напряжение  , показанное
на рис. 4, а, тогда напряжение на выходе ФД должно иметь вид рис. 4, б.
, показанное
на рис. 4, а, тогда напряжение на выходе ФД должно иметь вид рис. 4, б.
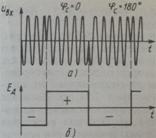
Рисунок 4 - Входное (а) и выходное
(б) напряжения ФД
Рассмотренный случай является
типичным для фазового телеграфирования, при котором начальные фазы паузы и
посылки отличаются на 180º.
При
фазовой модуляции (ФМ) фаза плавно изменяется в соответствии с передаваемой
информацией. Так как в спектре напряжения на выходе ФД имеются частотные
составляющие, которых не было в спектре напряжения , то для
реализации ФД нельзя использовать линейную систему с постоянными параметрами.
Фазовое детектирование нельзя также осуществить с помощью простой
безынерционной нелинейной системы. Например, постоянная составляющая тока
диодного детектора зависит только от амплитуды входного напряжения и не зависит
от его фазы и частоты. Поэтому ФД можно выполнить на основе линейной системы с
переменными параметрами (параметрической системы).
Структурная схема ФД показана на
рис. 5. Эта схема совпадает со структурной схемой преобразователя частоты;
отличие состоит лишь в том, что частота гетеродина (опорное напряжение)  . Под
действием опорного напряжения
. Под
действием опорного напряжения  меняется активный параметр схемы,
обычно крутизна S.
меняется активный параметр схемы,
обычно крутизна S.
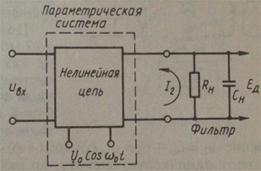
Рисунок 5 - Структурная схема ФД
Схема ФД совпадает также со схемой
параметрического амплитудного детектора (АД), поэтому продетектированное
напряжение на выходе ФД
 (25)
(25)
где S1 - амплитуда
первой гармоники крутизны тока преобразовательного элемента;
 .
.
Фазовое детектирование
осуществляется с помощью параметрической цепи, в которой источник опорного
напряжения должен быть синхронным с источником сигнала.
В зависимости от вида нелинейной
цепи и способа ее включения различают однотактные, балансные и кольцевые ФД. В
качестве нелинейного элемента используют диоды и транзисторы. Для нашей системы
мы будем использовать однотактный ФД.
Детектор выполнен по однотактной
схеме (рис. 6).
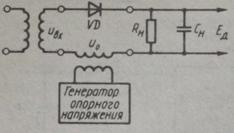
Рисунок 6 - Однотактный диодный
фазовый детектор
Для осуществления фазового
детектирования к диоду прикладывается входной сигнал и опорное напряжение;
напряжение  на выходе
ФД определяется выражением (24), полученным при предположении, что
на выходе
ФД определяется выражением (24), полученным при предположении, что  .
Характеристика детектирования диодного ФД, согласно (24), близка к косинусоиде.
.
Характеристика детектирования диодного ФД, согласно (24), близка к косинусоиде.
Принцип действия ФД по схеме рис. 5
можно пояснить, рассматривая его не как параметрическую цепь, а как систему с
амплитудным детектированием суммы двух гармонических колебаний  (рис. 7,
а). На выходе такого амплитудного детектора действует суммарное напряжение
(рис. 7,
а). На выходе такого амплитудного детектора действует суммарное напряжение
 .(26)
.(26)
Эти два колебания имеют одинаковую
частоту, но разные фазы. В результате векторного сложения двух напряжений (рис
7, б) получают напряжение той же частоты, но другой фазы. Амплитуда суммарного
колебания
 .(27)
.(27)
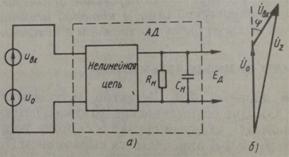
Рисунок 7 - Система с АД суммы двух
гармонических колебаний (а); векторное сложение двух напряжений (б)
Напряжение на выходе АД с
коэффициентом передачи 
 (28)
(28)
Согласно (27), напряжение на выходе
ФД зависит от φ
входного
сигнала; вид зависимости от φ определяется
отношением  . В общем
случае характеристика детектирования существенно отличается от косинусоиды
(рис. 8, а). Если
. В общем
случае характеристика детектирования существенно отличается от косинусоиды
(рис. 8, а). Если  , то
, то
 (29)
(29)

Таким образом. При малых амплитудах
входного сигнала характеристика детектирования однотактного диодного ФД имеет
косинусоидальную форму. Если  , то
, то
 ;(30)
;(30)
в таком случае характеристика
детектирования представляет собой циклоиду (рис 8, б), сильно отличающуюся от
косинусоиды.
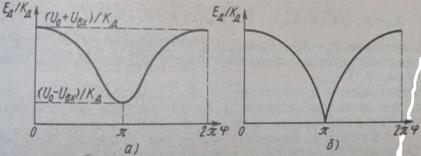
Рисунок 8 - Характеристики
детектирования
Однотактный диодный фазовый детектор
можно рассматривать как параметрическую цепь либо как цепь с АД, на входе
которого действует суммарное напряжение входного сигнала и опорного колебания.
Форма характеристики детектирования ФД зависит от отношения ; при она близка
к косинусоиде, при она имеет
форму циклоиды.
В нашем случае воспользуемся
двухтактным диодным ФД.
Рисунок 9 - Схема ФД
Дискриминационна характеристика рис.
10.
Рисунок 10 - Дискриминационная характеристика ФД
2.4 Синхронный детектор
В синхронный фазовых детекторах с большой
чувствительностью, где коэффициент усиления усилителя постоянного тока (УПТ)
велик, а следовательно, велика опасность его разбаланса, целесообразно
применять специальные типы недетектирующих ФД. К ним относится детектор на
встречно параллельных диодах, схема которого показана на рис. 11.
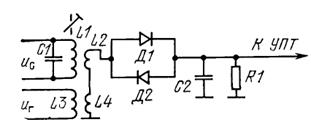
Рисунок 11 - Фазовый детектор на
встречно-параллельных диодах
Вольт-амперная характеристика диодов, включенных
встречно-параллельно, приближенно описывается уравнением кубической параболы
рис. 12:
 .(31)
.(31)

Рисунок 12 - Вольт-амперная характеристика
встречно-параллельных диодов
Для сравнения на том же рисунке показана
штриховой линией характеристика одного диода. На встречно-параллельные диоды
подается сумма напряжений сигнала и опорного гетеродина:
 .(32)
.(32)
Подставив это выражение в уравнение,
описывающее характеристику встречно-параллельных диодов, легко убедиться, что в
цепи нагрузки будут протекать токи частот сигнала ωС, гетеродина
ωГ и продуктов
преобразования с частотами  . Если напряжение гетеродина UГ намного
больше, чем напряжение UС (обычно это
выполняется), то амплитуда остальных продуктов преобразований оказывается
пренебрежительно малой. Блокировочный конденсатор С2 замыкает все
высокочастотные токи, и в нагрузке протекает лишь ток разности частоты:
. Если напряжение гетеродина UГ намного
больше, чем напряжение UС (обычно это
выполняется), то амплитуда остальных продуктов преобразований оказывается
пренебрежительно малой. Блокировочный конденсатор С2 замыкает все
высокочастотные токи, и в нагрузке протекает лишь ток разности частоты:
 .(33)
.(33)
Физическую работу детектора можно
пояснить следующим образом. При переходе напряжения гетеродина через нуль оба
диода закрыты, и ток в цепи отсутствует. На пиках как положительной, так и
отрицательной полуволн гетеродинного напряжения один из диодов проводит и
источник сигнала оказывается подключенным к нагрузке. Таким образом, детектор
работает как ключ, замыкающий цепь с частотой, равной удвоенной частоте
гетеродина. Когда частота замыканий «ключа» близка к частоте сигнала, в
нагрузке выделяются биения с разностной частотой  или
или  . Если же частота замыканий ключа
совпадает с частотой сигнала, в нагрузке выделяется постоянное напряжение, т.е.
происходит синхронное детектирование сигнала. Полярность этого сигнала
положительна, если моменты замыканий «ключа» совпадают с положительными
полуволнами сигнала, и отрицательными в противном случае. Если же моменты
замыканий «ключа» совпадают с моментами с переходом сигнала через нуль,
напряжение в нагрузке отсутствует. Таким образом, работа детектора происходит в
соответствии с рисунком с рис. 13, его характеристика подобна изображенной на
рис. 14, а выходное напряжение дается формулой
. Если же частота замыканий ключа
совпадает с частотой сигнала, в нагрузке выделяется постоянное напряжение, т.е.
происходит синхронное детектирование сигнала. Полярность этого сигнала
положительна, если моменты замыканий «ключа» совпадают с положительными
полуволнами сигнала, и отрицательными в противном случае. Если же моменты
замыканий «ключа» совпадают с моментами с переходом сигнала через нуль,
напряжение в нагрузке отсутствует. Таким образом, работа детектора происходит в
соответствии с рисунком с рис. 13, его характеристика подобна изображенной на
рис. 14, а выходное напряжение дается формулой
 .(34)
.(34)
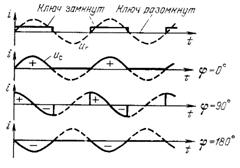
Рисунок 13 - Временные диаграммы
работы ФД
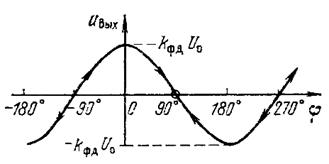
Рисунок 14 - Фазовая характеристика
детектора
Описанный детектор имеет два важных
достоинства. Во-первых благодаря настройке гетеродина на частоту, равную
половине частоты сигнала, практически полностью устраняется «просачивание»
гетеродинного напряжения на вход ФД. Это значительно улучшает балансировку и
стабильность «нуля» фазового детектора. Во-вторых, встречно-параллельные диоды
не детектируют ни напряжение гетеродина, ни напряжение сигнала. Следовательно,
включенный за фазовым детектором УПТ не будет разбалансироваться при изменении
пир изменении упомянутых напряжений.
Для дальнейшего улучшения развязки
входных и гетеродинных цепей ФД целесообразно применить балансовую схему на
встречно-параллельных диодах, показанную на рис. 15.
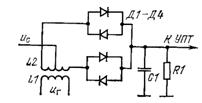

Рисунок 15 - Балансный ФД на
встречно-параллельных диодах
Здесь напряжение гетеродина подводится
симметрично к двум парам встречно-параллельных диодов. В результате напряжение
гетеродина на средней точке катушки связи L2
отсутствует. Кроме того, отсутствуют и потери сигнала в цепи связи с
гетеродином.
Так как после фазового детектора сигнал будет
представлять собой код, то для синхронного детектора можно применить схему
исключающее ИЛИ.
У него может быть всего два входа, и НИЗКИЙ
уровень на выходе устанавливается, если состояния на обоих входах совпадают, в
противном случае устанавливается ВЫСОКИЙ уровень.
На рис. 16 показан этот элемент и его таблица
истинности.
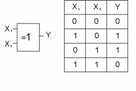
Рисунок 16 - Логический элемент исключающее ИЛИ:
а - символьное обозначение; б - таблица истинности
2.5 Оценка основных параметров ФАПЧ
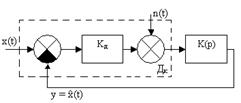
Рисунок 17 - Структурная схема следящей системы
Передаточная функция:
 (35)
(35)
Коэффициент передачи разомкнутой
системы найдём из условия:
 (36)
(36)
где kД -
коэффициент передачи дискриминатора.
 (37)
(37)
Используя правила преобразования
(последовательное и встречно-параллельное соединение для звеньев) для
передаточной функции замкнутой системы можем записать:
 (38)
(38)
 (39)
(39)
Запас по фазе определяется как ∆φ =
π-φ(ωср), где ωср - частота
на которой значение ЛАХ равно нулю. Считается, что запас по фазе устойчивости
достаточный, если ∆φ≥π/6. Запас по
усилению ∆L определяется по кривой ЛАХ на частоте, при которой фаза равна
-π
рад.
Достаточный запас по усилению должен быть 3 Дб.
ЛАХ разомкнутой системы:
 (40)
(40)

Рисунок 18 - ЛАХ разомкнутой системы
ЛФХ разомкнутой системы:
 (41)
(41)
Рисунок 19 - ЛФХ разомкнутой системы
Рисунок 20 - АФХ разомкнутой системы
2.6 Интегратор
Интегрирующие цепи предназначены для интегрирования
во времени электрических входных сигналов. Величина выходного сигнала в общем
виде описывается уравнением
 ,(42)
,(42)
где  - начальное значение выходного
сигнала в момент времени t = 0;
- начальное значение выходного
сигнала в момент времени t = 0;
k -
коэффициент пропорциональности.
Простейшей пассивной линейной
интегрирующей цепью является четырехполюсник, состоящий из RC - элементов (рис.
21).
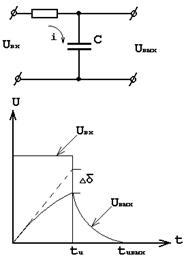
Рисунок 21 - Пассивная линейно
интегрирующая RC цепочка и
зависимость входного напряжения от выходного
При подаче прямоугольного импульса с
идеальными фронтами на интегрирующую RC цепь выходное напряжение нарастает по
экспоненциальному закону:
 (43)
(43)
где  .
.
Так как накопление сигнала будет
большой величиной, т.е. время интегрирования, то уместнее использовать цифровой
интегратор. Что также нам позволит упростить регулировку этого значения.
Интегрирующие аналого-цифровые
преобразователи имеют минимальное число необходимых точных компонентов, высокую
помехоустойчивость, отсутствие дифференциальной нелинейности, низкую стоимость.
Эти свойства интегрирующих АЦП определили их широкое применение для построения
измерительных приборов и систем невысокого быстродействия (от одного измерения
до нескольких тысяч в секунду), для которых в качестве основных выступают
требования высокой точности и нечувствительность к помехам.
Интегрирующий АЦП, как правило,
состоит из двух преобразователей: преобразователя напряжения или тока в частоту
или длительность импульсов и преобразователя частоты или длительности в код.
Упрощенная схема АЦП, работающего в
два основных такта (АЦП двухтактного интегрирования), приведена на рис. 22.
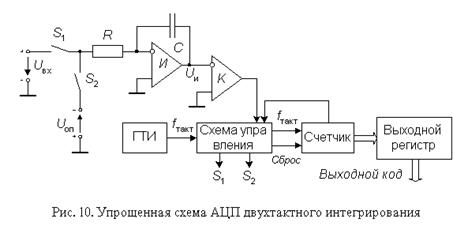
Рисунок 22 - Упрощенна схема АЦП
двухтактного интегрирования
Преобразование проходит две стадии:
стадию интегрирования и стадию счета. В начале первой стадии ключ S1
замкнут, а ключ S2 разомкнут. Интегратор И интегрирует входное
напряжение Uвх. Время интегрирования входного напряжения t1
постоянно; в качестве таймера используется счетчик с коэффициентом пересчета Kсч,
так что
 (44)
(44)
К моменту окончания интегрирования
выходное напряжение интегратора составляет
 (45)
(45)
где Uвх.ср. - среднее за
время t1 входное напряжение.
После окончания стадии
интегрирования ключ S1 размыкается, а ключ S2 замыкается
и опорное напряжение Uоп поступает на вход интегратора. При этом
выбирается опорное напряжение, противоположное по знаку входному напряжению. На
стадии счета выходное напряжение интегратора линейно уменьшается по абсолютной
величине, как показано на рис. 23.
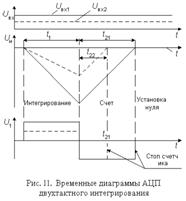
Рисунок 23 - Временные диаграммы АЦП
двухтактного интегрирования
Стадия счета заканчивается, когда
выходное напряжение интегратора переходит через нуль. При этом компаратор К
переключается и счет останавливается. Интервал времени, в котором проходит
стадия счета, определяется уравнением
 (46)
(46)
Подставив значение Uи(t1)
из (45) в (46) с учетом того, что
 (47)
(47)
где n2 - содержимое
счетчика после окончания стадии счета, получим результат
 (48)
(48)
Из этой формулы следует, что
отличительной особенностью метода многотактного интегрирования является то, что
ни тактовая частота, ни постоянная интегрирования RC не влияют на результат.
Необходимо только потребовать, чтобы тактовая частота в течение времени t1+t2
оставалась постоянной. Это можно обеспечить при использовании простого
тактового генератора, поскольку существенные временные или температурные дрейфы
частоты происходят за время несопоставимо большее, чем время преобразования.
При выводе выражений (44)...(48) мы
видели, что в окончательный результат входят не мгновенные значения
преобразуемого напряжения, а только значения, усредненные за время t1.
Поэтому переменное напряжение ослабляется тем сильнее, чем выше его частота.
Определим коэффициент передачи
помехи Кп для АЦП двухтактного интегрирования. Пусть на вход
интегратора поступает гармонический сигнал единичной амплитуды частотой f с
произвольной начальной фазой φ. Среднее значение этого сигнала за
время интегрирования t1 равно
 (49)
(49)
Эта величина достигает максимума по
модулю при φ
= +/- πk, k=0,
1, 2,... В этом случае
 (50)
(50)
Из (50) следует, что переменное
напряжение, период которого в целое число раз меньше t1, подавляется
совершенно (рис. 24). Поэтому целесообразно выбрать тактовую частоту такой,
чтобы произведение Kсч·fтакт было бы равным, или кратным
периоду напряжения промышленной сети.
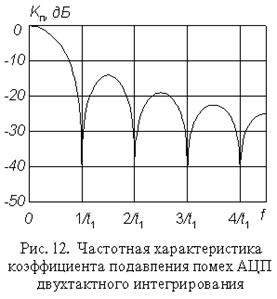
Рисунок 24 - Частотная
характеристика коэффициента подавления помех АЦП двухтактного интегратора
АЦП многотактного интегрирования
имеют ряд недостатков. Во-первых, нелинейность переходной статической
характеристики операционного усилителя, на котором выполняют интегратор,
заметным образом сказывается на интегральной нелинейности характеристики
преобразования АЦП высокого разрешения. Для уменьшения влияния этого фактора
АЦП изготавливают многотактными. Например, 13-разрядный AD7550 выполняет
преобразование в четыре такта. Другим недостатком этих АЦП является то
обстоятельство, что интегрирование входного сигнала занимает в цикле
преобразования только приблизительно третью часть. Две трети цикла
преобразователь не принимает входной сигнал. Это ухудшает помехоподавляющие
свойства интегрирующего АЦП. В-третьих, АЦП многотактного интегрирования должен
быть снабжен довольно большим количеством внешних резисторов и конденсаторов с
высококачественным диэлектриком, что значительно увеличивает место, занимаемое
преобразователем на плате и, как следствие, усиливает влияние помех.
Эти недостатки во многом устранены в
конструкции сигма-дельта АЦП (в ранней литературе эти преобразователи
назывались АЦП с уравновешиванием или балансом зарядов). Своим названием эти
преобразователи обязаны наличием в них двух блоков: сумматора (обозначение
операции - S) и интегратора (обозначение операции - D). Один из принципов,
заложенных в таких преобразователях, позволяющий уменьшить погрешность,
вносимую шумами, а, следовательно, увеличить разрешающую способность - это
усреднение результатов измерения на большом интервале времени.
Основные узлы АЦП - это сигма-дельта
модулятор и цифровой фильтр. Схема n-разрядного сигма-дельта модулятора первого
порядка приведена на рис. 25. Работа этой схемы основана на вычитании из
входного сигнала Uвх(t) величины сигнала на выходе ЦАП, полученной
на предыдущем такте работы схемы. Полученная разность интегрируется, а затем
преобразуется в код параллельным АЦП невысокой разрядности. Последовательность
кодов поступает на цифровой фильтр нижних частот.
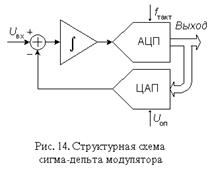
Рисунок 25- Частотная характеристика
коэффициента подавления помех АЦП двухтактного интегратора
Порядок модулятора определяется
численностью интеграторов и сумматоров в его схеме. Сигма-дельта модуляторы
N-го порядка содержат N сумматоров и N интеграторов и обеспечивают большее
соотношение сигнал/шум при той же частоте отсчетов, чем модуляторы первого
порядка. Примерами сигма-дельта модуляторов высокого порядка являются
одноканальный AD7720 седьмого порядка и двухканальный ADMOD79 пятого порядка.
Наиболее широко в составе ИМС
используются однобитные сигма-дельта модуляторы, в которых в качестве АЦП
используется компаратор, а в качестве ЦАП - аналоговый коммутатор (рис. 26)
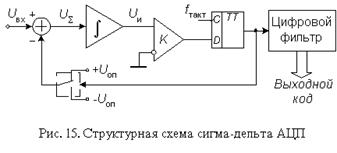
Рисунок 26 - Структурная схема
сигма-дельта АЦП
При использовании двоичного счетчика
в качестве преобразователя потока битов, поступающих с выхода компаратора,
необходимо выделять фиксированный цикл преобразования, длительность которого
равна произведению Kсч·fтакт. После его окончания должно
производиться считывание результата, например, с помощью регистра-защелки и
обнуление счетчика. В этом случае с точки зрения помехоподавляющих свойств
сигма-дельта АЦП близки к АЦП многотактного интегрирования. Более эффективно с
этой точки зрения применение в сигма-дельта АЦП цифровых фильтров с конечной
длительностью переходных процессов.
В сигма-дельта АЦП обычно
применяются цифровые фильтры с амплитудно-частотной характеристикой (АЧХ) вида
(sinx/x)3. Передаточная функция такого фильтра в z-области
определяется выражением
 (51)
(51)
где М - целое число, которое
задается программно и равно отношению тактовой частоты модулятора к частоте
отсчетов фильтра. (Частота отсчетов - это частота, с которой обновляются
данные). Например, для АЦП AD7714 это число может принимать значения от 19 до
4000. В частотной области модуль передаточной функции фильтра
 (52)
(52)
На рис. 24 приведен график
амплитудно-частотной характеристики цифрового фильтра, построенной согласно
выражению (51) при fтакт=38,4 кГц и М=192, что дает значение частоты
отсчетов, совпадающей с первой частотой режекции фильтра АЦП, fотсч=50
Гц. Сравнение этой АЧХ с АЧХ коэффициента подавления помех АЦП с двукратным
интегрированием показывает значительно лучшие помехоподавляющие свойства
сигма-дельта АЦП.

Рисунок 27 - АЧХ цифрового фильтра
сигма-дельта АЦП
В то же время применение цифрового
фильтра нижних частот в составе сигма-дельта АЦП вместо счетчика вызывает
переходные процессы при изменении входного напряжения. Время установления
цифровых фильтров с конечной длительностью переходных процессов, как следует из
их названия, конечно и составляет для фильтра вида (sinx/x)3 четыре
периода частоты отсчетов, а при начальном обнулении фильтра - три периода. Это
снижает быстродействие систем сбора данных на основе сигма-дельта АЦП. Поэтому
выпускаются ИМС AD7730 и AD7731, оснащенные сложным цифровым фильтром,
обеспечивающие переключение каналов со временем установления 1 мс при сохранении
эффективной разрядности не ниже 13 бит (так называемый Fast-Step режим). Обычно
цифровой фильтр изготавливается на том же кристалле, что и модулятор, но иногда
они выпускаются в виде двух отдельных ИМС (например, AD1555 - модулятор
четвертого порядка и AD1556 - цифровой фильтр).
Сравнение сигма-дельта АЦП с АЦП
многотактного интегрирования показывает значительные преимущества первых.
Прежде всего, линейность характеристики преобразования сигма-дельта АЦП выше,
чем у АЦП многотактного интегрирования равной стоимости. Это объясняется тем,
что интегратор сигма-дельта АЦП работает в значительно более узком динамическом
диапазоне, и нелинейность переходной характеристики усилителя, на котором
построен интегратор, сказывается значительно меньше. Емкость конденсатора
интегратора у сигма-дельта АЦП значительно меньше (десятки пикофарад), так что
этот конденсатор может быть изготовлен прямо на кристалле ИМС. Как следствие,
сигма-дельта АЦП практически не имеет внешних элементов, что существенно
сокращает площадь, занимаемую им на плате, и снижает уровень шумов. В
результате, например, 24-разрядный сигма-дельта АЦП AD7714 изготавливается в
виде однокристальной ИМС в 24-выводном корпусе, потребляет 3 мВт мощности и
стоит примерно 14 долларов США, а 18-разрядный АЦП восьмитактного
интегрирования HI-7159 потребляет 75 мВт и стоит около 30 долларов. К тому же
сигма-дельта АЦП начинает давать правильный результат через 3-4 отсчета после
скачкообразного изменения входного сигнала, что при величине первой частоты
режекции, равной 50 Гц, и 20-разрядном разрешении составляет 60-80 мс, а
минимальное время преобразования АЦП HI-7159 для 18-разрядного разрешения и той
же частоты режекции составляет 140 мс. В настоящее время ряд ведущих по
аналого-цифровым ИМС фирм, такие как Analog Devices и Burr-Brown, прекратили
производство АЦП многотактного интегрирования, полностью перейдя в области
АЦ-преобразования высокого разрешения на сигма-дельта АЦП.
Сигма-дельта АЦП высокого разрешения
имеют развитую цифровую часть, включающую микроконтроллер. Это позволяет
реализовать режимы автоматической установки нуля и самокалибровки полной шкалы,
хранить калибровочные коэффициенты и передавать их по запросу внешнего
процессора.
2.7 Генератор управляемый
напряжением
радиотехнический дальномер плотина
гидроэлектростанция
Генератор, управляемый напряжением, или ГУН -
это устройство генерирования колебания, частота которого определяется
управляющим напряжением.
Это управляющее напряжение подается, как
правило, на специальный вход управления и позволяет перестроить генератор в
требуемом диапазоне частот. По сути дела, в ГУН происходит преобразование
величины управляющего напряжения, изменяющегося в диапазоне Umin - Umax
в номинал выходной частоты в диапазоне fmin - fmax (рис.
28).
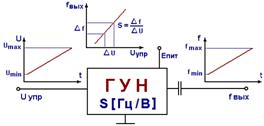
Рисунок 28 - Функционирование ГУН
Основные параметры и характеристики ГУН:
· Диапазон частот перестройки ГУН.
Определяет диапазон изменения частоты от fmin до fmax
сигнала на выходе ГУН.
· Крутизна перестройки ГУН по частоте.
Это крутизна характеристики перестройки по частоте от напряжения перестройки
(выражается в Гц/В), показывающая, насколько изменится выходная частота при
изменении управляющего напряжения на единицу, отражает чувствительность
генератора к воздействиям по управляющему входу.
· Характеристика перестройки ГУН по
частоте. Это представленная в графическом виде зависимость частоты на выходе
ГУН от управляющего напряжения. В идеальном случае соответствие между выходной
частотой и напряжением настройки должно быть линейным.
· Нелинейность перестройки по частоте.
Отклонение от линейного характера характеристики изменения частоты ГУН от
напряжения перестройки.
· Мощность выходного сигнала РЧ ГУН.
Зависит от частоты и определяется типом используемого ГУН и элементной базы.
Количественно определяется мощностью частоты основной гармоники синусоидального
сигнала на нагрузке 50 Ом на выходе ГУН.
· Отклонение от номинальной величины
мощности на выходе. Это разность между максимальным и минимальным уровнем
мощности на выходе ГУН на нагрузке 50 Ом при данной температуре (выражается в
дБ) от частоты.
· Зависимость выходной мощности от
температуры. Это изменение мощности сигнала основной гармоники на выходе ГУН от
температуры.
· Зависимость частоты от температуры.
Изменение частоты ГУН от температуры при постоянном напряжении перестройки.
· Скорость перестройки частоты. Это
время, которое требуется для установления выходной частоты ГУН на 90 процентов
от ее конечного значения после начала перестройки частоты ГУН.
· Ширина полосы частот модуляции. Это
частота модулирующего сигнала, при которой девиация частоты уменьшается до
0.707 от ее постоянного значения. Обычно она зависит от полного сопротивления
источника модулирующего сигнала, типичное значение которого 50 Ом.
· Остаточная расстройка ГУН. При
скачкообразном изменении напряжения перестройки ГУН перестроится от начальной
частоты f1 до конечной частоты f2. При этом частота f2
установится до требуемого значения через некоторое время. Остаточная расстройка
ГУН - это отклонение частоты от конечного значения за определенное время после
скачкообразного изменения напряжения перестройки.
· Уход частоты ГУН. При скачкообразном
изменении управляющего напряжения ГУН перестроится от начальной частоты f1
до конечной частоты f2. При этом частота f2 установится
до требуемого значения через некоторое время. “Уход” частоты - это отклонение
частоты от конечного значения за определенное время после скачкообразного
изменения напряжения перестройки.
· Уход частоты ГУН при изменении
температуры. Это изменение частоты ГУН в зависимости от температуры при
постоянном напряжении перестройки.
· Затягивание частоты - отклонение
выходной частоты ГУН от номинальной величины, вызванное изменениями его
выходной нагрузки.
· Явление затягивания частоты должно
быть минимизировано, особенно в тех случаях, когда каскады усиления мощности в
структуре передатчиков находятся близко к ГУН. При этом импульсный режим работы
УМ, при котором существенно меняются параметры усилителя, может оказывать
влияние на выходную частоту ГУН. Такая паразитная обратная связь может
приводить даже к срыву процессов РЧ синхронизации ГУН.
· Смещение частоты - изменение
выходной частоты ГУН при воздействии внешних воздействий, исключая изменение
величины нагрузки генератора, при постоянном напряжении настройки. При этом
чаще всего ограничиваются лишь учетом изменения величины напряжения источника
питания. При использовании того же самого примера, что и ранее, внезапный
бросок тока, вызванный выходным усилителем абонентского устройства, может
производить выброс постоянного напряжения на вводе питания ГУН, что в свою
очередь приведет к нежелательному скачку выходной частоты.
· Чтобы определить чувствительность
ГУН по смещению, производят изменение величины напряжения питания в некотором
диапазоне, измеряя при этом выходную частоту ГУН. Смещение частоты обычно
выражается в МГц/В и определяется при изменении напряжения питания на ± (0,1 -
0,5) В от номинального значения для различных фиксированных величин напряжений
настройки. Для определения чувствительности необходимо разделить полученный
частотный сдвиг на величину изменения напряжения. Генераторы хорошего качества,
используемые в РЧ блоках устройств ССПО, имеют чувствительность по смещению
1-10% от чувствительности по основному входу настройки.
· Коэффициент гармоник выходного
напряжения ГУН. Это уровень гармонических составляющих выходного сигнала.
Измеряется в дБ по отношению к несущей (дБн).
· Побочные составляющие,
негармонические побочные составляющие. Побочные компоненты и негармонически
зависимые сигналы, присутствующие в спектре выходного сигнала ГУН. Измеряются в
дБн.
· Фазовый шум одной боковой полосы или
просто Фазовый шум. Он измеряется в полосе 1 Гц по отношению к мощности несущей
частоты при определенном частотном сдвиге или расстройке от нее. Фазовый шум
измеряется в дБн/Гц. При этом оговаривается величина расстройки. Например, -100
дБн/Гц при отстройке 100 кГц.
Использовать типовые схемы ГУН не представляется
возможным в виду необходимости точной настройки и крутой характеристики
перестройки. Специально была выбрана схема ГУН:
Рисунок 29 - Схема генератора перестраиваемого
напряжением
Рисунок 30 - Печатная плата генератора
перестраиваемого напряжением
3. Определение абсолютного значения
дальности
Предлагаемый метод определения приращения
расстояния, можно также использовать для определения абсолютной дальности, при
этом доработка схемы будет незначительной.
При включении системы ФАПЧ начинает подстраивать
ГУН, чтобы фазы отраженного сигнала совпадали с генерируемым сигналом. После
настройки фаз меряется частота и записывается в микроконтроллер. Контроллер,
управляя ГУН начинает менять частоту по определенному алгоритму, чтобы прошло
несколько полных периодов, при этом установленный на входе счетчик ведет их
подсчет, при этом ФАПЧ заведомо не успевает дополнительно перестраивать ГУН,
так как его быстродействие будет медленнее. Когда ГУН закончит перестраиваться
ФАПЧ снова настроит его так, чтобы фазы отраженного сигнала и генерируемого ГУН
совпадали.
С учетом формул (1) и (2) построим систему
уравнений в первоначальный момент настройки фаз и конечный момент настройки фаз
ФАПЧ:
 (53)
(53)
где n1 и n2 целые части
 .
.
То есть, изменяя частоту, будем
счетчиком считать разность  . Следует так же отметить, что
расстояние D при этом не
меняется
. Следует так же отметить, что
расстояние D при этом не
меняется
 (54)
(54)
Вместо n1 подставим
выражение из первого уравнения во второе. Получится уравнение с одной
неизвестной D, так как
частоту перестройки закладываем заранее, а  - посчитается счетчиком.
- посчитается счетчиком.
 (55)
(55)
 (56)
(56)
Этот принцип позволяет определять
абсолютное расстояние без использования измерения задержки при помощи
шумоподобных сигналов псевдослучайной последовательности, что тем самым
упростит данную систему.
4. Технико-экономическое обоснование
работы
Гидротехнические сооружения гидроэлектростанций
(ГЭС) представляют собой объекты повышенной опасности, поэтому постоянное
наблюдение за их состоянием, контроль геометрических и физико-механических
параметров минимальное необходимое требование, обеспечивающее безопасность и
надежность работы этих сооружений в течение всего эксплуатационного срока.
Естественно, что крупные строительные
конструкции нуждаются в оперативных оценках их состояния по большому числу
физических параметров и по многим контрольным точкам, разнесенным в
пространстве и времени.
Между тем сегодня многие гидротехнические
сооружения крупных гидроэлектростанций России, используют технику наблюдения,
относящуюся к поколению 30-летней давности по состоянию на начало их
строительства, что не отвечает требованиям безопасности работы этих сооружений
с учетом старения во времени материалов и деталей строительных конструкций.
Одним из параметров контроля и мониторинга
гидротехнических сооружений ГЭС является оценка прочностных характеристик, по
геометрической форме плотины (створа), для которой при воздействии различных
внешних факторов (чередование времен года, изменение уровня водохранилища,
сейсмических воздействий и др.) необходимо измерять перемещение отдельных
участков гребня плотины.
В дипломной работе разрабатывается
радиотехнический метод и аппаратура высокоточного контроля геометрической формы
плотин гидроэлектростанций. Основными достоинствами метода являются:
· Не требует строительства в теле
плотины специального канала (если сравнивать со струнным методом определения
смещения);
· Обладает высокой инструментальной
точностью, что предопределяет его перспективность.
Для оценки экономической эффективности
используются экспертные методы. Они позволяют оценить уровень
конкурентоспособности продукции по качественным и стоимостным показателям по
сравнению с существующими на рынке товарами-аналогами конкурентов предприятия.
Выбор экспертных методов связан с неимением информации по ценам на
проектирование, постройку и эксплуатацию систем контроля геодезического створа
плотин.
Оценка конкурентоспособности разрабатываемой
системы выполняется по системе показателей с оценкой их значимости.
Для определения значимости параметров качества
изделия может быть использована матрица смежности, в которой осуществляется
попарно сравнение параметров изделия (каждый с каждым), но не по величине, а по
их значению, влиянию на качество, технический уровень, потребительские свойства
изделия.
Новая разработка и аналоги обладают следующим
набором характеристик:
. Стоимость затрат на реализацию метода
(Х1);
. Инструментальная точность определения
смещения (Х2);
. Влияние погодных условий на точность
метода (Х3);
. Универсальность метода (Х4);
. Скорость определения смещения (Х5);
Сравнивая попарно все параметры, составляют
квадратную матрицу смежности (таблица 1), где знаки >, < = заменяются
коэффициентами предпочтительности аi
(соответственно: 1.5, 0.5, 1.0).
Заполняя матрицу, определим значения абсолютной
значимости параметра (Bi)
и относительной значимости параметров (B’i).
Bi определяется
построчным суммированием коэффициентов предпочтительности (аj).
Сумма Bi (по столбцу) должна быть равна квадрату числа анализируемых
параметров. Значение B’i
определяется отношением абсолютной значимости соответствующего параметра (Bi)
к сумме абсолютных значимостей параметра в целом (B).
Таблица 1 - Расчет значимости параметров системы
|
Х1
|
Х2
|
Х3
|
Х4
|
Х5
|
Вi
|
B’i
|
|
Х1
|
=
1,0
|
< 0,5
|
< 0,5
|
> 1,5
|
< 0,5
|
4
|
0,16
|
|
Х2
|
> 1,5
|
=
1,0
|
=
1,0
|
> 1,5
|
> 1,5
|
6,5
|
0,26
|
|
Х3
|
> 1,5
|
=
1,0
|
=
1,0
|
> 1,5
|
> 1,5
|
6,5
|
0,26
|
|
Х4
|
< 0,5
|
< 0,5
|
< 0,5
|
=
1,0
|
< 0,5
|
3
|
0,12
|
|
Х5
|
> 1,5
|
< 0,5
|
< 0,5
|
> 1,5
|
=
1,0
|
5
|
0,2
|
|
сумма
|
|
25
|
1
|
Для дальнейшего анализа и определения наиболее
конкурентоспособной модели необходимо осуществить бальную оценку каждого
параметра для каждого из вариантов изделия (количество баллов от 1 до 5). Далее
заполняем таблицу 2, указав в одной из строк относительную значимость
параметров. При этом обозначаем методы таким образом: A
- разрабатываемый радиотехнический метод; B
- метод струнного створа; С - метод оптического створа.
Таблица 2 - Бальная оценка значимости параметров
систем
|
B’i
для Xi Модель
|
0,16
|
0,26
|
0,26
|
0,12
|
0,2
|
|
X1
|
X2
|
X3
|
X4
|
X5
|
|
A
|
4
|
5
|
4
|
5
|
3
|
|
B
|
2
|
3
|
5
|
2
|
5
|
|
С
|
3
|
4
|
3
|
5
|
3
|
Показатель конкурентоспособности для каждой из
анализируемых систем может быть найден как сумма произведений соответствующих
значений B’i
на соответствующее бальное значение параметра модели.
Ka=0,16*4+0,26*5+0,26*4+0,12*5+0,2*3=4,18
Kb=0,16*2+0,26*3+0,26*5+0,12*2+0,2*5=3,64
Kc=0,16*3+0,26*4+0,26*3+0,12*5+0,2*3=3,5
Модель с максимальным значением показателя «К»
(конкурентоспособности) наиболее предпочтительна. В данном случае наиболее
конкурентоспособным оказался разработанный метод.
Для получения более точного результата,
необходимо провести оценку конкурентоспособности изделий другим методом,
позволяющим определить их приоритетность по каждому из выбранных параметров
системы Хi,
и лишь в том случае принимать определенное решение. Для этого целесообразно
применить методику расчета показателя конкурентоспособности по приоритетности
вариантов, позволяющую более точно (в отличие от бальной) определить значимость
параметров качества изделий.
В работе определяется приоритетность каждой
модели по каждому из выбранных параметров системы. С этой целью заполняется
такое количество матриц смежности, которое соответствует количеству выбранных
для анализа параметров Хi,
смотреть таблицы 3 - 7.
Таблица 3 - Анализ приоритетности устройств по
показателю «Х1»
|
Модель Изд
|
A
|
B
|
С
|
Qi
|
qi
|
|
A
|
= 1
|
> 1.5
|
> 1.5
|
4
|
0,45
|
|
B
|
< 0.5
|
= 1
|
< 0.5
|
2
|
0,22
|
|
С
|
< 0.5
|
> 1.5
|
= 1
|
3
|
0,33
|
|
сумма
|
|
9
|
1
|
Qi
- абсолютная значимость (приоритетность) каждой модели по анализируемому
параметру.
qi
- относительная (искомая) значимость модели по анализируемому параметру.
Таблица 4 - Анализ приоритетности устройств по
показателю «Х2»
|
Модель Изд
|
A
|
B
|
С
|
Qi
|
qi
|
|
A
|
= 1
|
> 1.5
|
> 1.5
|
4
|
0,45
|
|
B
|
< 0.5
|
= 1
|
< 0.5
|
2
|
0,22
|
|
С
|
< 0.5
|
> 1.5
|
= 1
|
3
|
0,33
|
|
сумма
|
|
9
|
1
|
Таблица 5 - Анализ приоритетности устройств по
показателю «Х3»
|
Модель Изд
|
A
|
B
|
С
|
Qi
|
qi
|
|
A
|
= 1
|
< 0.5
|
> 1.5
|
3
|
0,33
|
|
B
|
> 1.5
|
= 1
|
> 1.5
|
4
|
0,45
|
|
С
|
< 0.5
|
< 0.5
|
= 1
|
2
|
0,22
|
|
сумма
|
|
9
|
1
|
Таблица 6 - Анализ приоритетности устройств по
показателю «Х4»
|
Модель Изд
|
A
|
B
|
С
|
Qi
|
qi
|
|
A
|
= 1
|
> 1.5
|
= 1
|
3,5
|
0,39
|
|
B
|
< 0.5
|
= 1
|
< 0.5
|
2
|
0,22
|
|
С
|
= 1
|
> 1.5
|
= 1
|
3,5
|
0,39
|
|
сумма
|
|
9
|
1
|
Таблица 7 - Анализ приоритетности устройств по
показателю «Х5»
|
Модель Изд
|
A
|
B
|
С
|
Qi
|
qi
|
|
A
|
= 1
|
< 0.5
|
= 1
|
2,5
|
0,275
|
|
B
|
> 1.5
|
= 1
|
> 1.5
|
4
|
0,45
|
|
С
|
= 1
|
< 0.5
|
= 1
|
2,5
|
0,275
|
|
сумма
|
|
9
|
1
|
В таблице 8 выполнено сравнение вариантов
использование изделий по системе критериев. Вместо баллов приведены значения qi
по моделям и параметрам.
Таблица 8 - Сводная таблица исходной информации
для расчета конкурентоспособности вариантов
|
B’i
для Xi Модель
|
0,16
|
0,26
|
0,26
|
0,12
|
0,2
|
|
X1
|
X2
|
X3
|
X4
|
X5
|
|
A
|
0,45
|
0,45
|
0,33
|
0,39
|
0,275
|
|
B
|
0,22
|
0,22
|
0,45
|
0,22
|
0,45
|
|
С
|
0,33
|
0,33
|
0,22
|
0,39
|
0,275
|
|
qi
|
1
|
1
|
1
|
1
|
1
|
Используя данные таблицы 8, определены
показатели конкурентоспособности «К» для каждой из анализируемых моделей:
Ka=0,45*0,16+0,45*0,26+0,33*0,26+0,39*0,12+0,275*0,2=0,377
Kb=0,22*0,16+0,22*0,26+0,45*0,26+0,22*0,12+0,45*0,2=0,326
Kc=0,33*0,16+0,33*0,26+0,22*0,26+0,39*0,12+0,275*0,2=0,298
В данном случае наиболее конкурентоспособным
методом также является разработанный метод.
По бальному методу выбора и по методу оценки по
приоритетности вариантов наиболее конкурентоспособного метода предлагаемая
модель системы выигрывает по следующим параметрам:
· Стоимость затрат на реализацию
метода (Х1);
· Инструментальная точность
определения смещения (Х2);
· Универсальность метода (Х4).
На предлагаемый метод погодные условия влияют
сильнее, чем на струнный створ, но их влияние можно будет спрогнозировать и
учитывать с помощью специальных устройств и оборудования.
Из приведенных результатов видно, что
использование предлагаемого метода выгоднее по сравнению с существующими
аналогами. Это означает, что нужно продолжать дальнейшие исследования,
проработку и внедрения этого метода.
. Безопасность и экологичность
разработки
В ходе дипломной работы разрабатывается
радиотехнический метод и аппаратура высокоточного контроля геометрической формы
плотин гидроэлектростанций. Разрабатываемый метод предполагает использование
источника сигнала - антенны СВЧ диапазона, а конкретнее частотное окно 2449.8
МГЦ - 2450.2 МГц (дециметровый диапазон).
5.1 Действие ЭМП на организм
человека
Экспериментальные данные как отечественных, так
и зарубежных исследователей свидетельствуют о высокой биологической активности
электромагнитных полей во всех частотных диапазонах. При относительно высоких
уровнях облучающего электромагнитного поля современная теория признает тепловой
механизм воздействия. При относительно низком уровне электромагнитного поля (к
примеру, для радиочастот выше 300 МГц это менее 1 мВт/см2) принято
говорить о нетепловом или информационном характере воздействия на организм.
Механизмы действия электромагнитного поля в этом случае еще мало изучены.
Варианты воздействия ЭМП на биоэкосистемы,
включая человека, разнообразны: непрерывное и прерывистое, общее и местное,
комбинированное от нескольких источников и сочетанное с другими
неблагоприятными факторами среды и т.д.
На биологическую реакцию влияют следующие
параметры ЭМП:
· интенсивность ЭМП (величина);
· частота излучения;
· продолжительность облучения;
· модуляция сигнала;
· сочетание частот ЭМП;
· периодичность действия.
Сочетание вышеперечисленных параметров может
давать существенно различающиеся последствия для реакции облучаемого
биологического объекта.
Многочисленные исследования в области
биологического действия ЭМП позволяют определить наиболее чувствительные
системы организма человека:
Нервная система
Большое число исследований, выполненных в
России, дают основание отнести нервную систему к одной из наиболее
чувствительных систем в организме человека к воздействию ЭМП. На уровне нервной
клетки, структурных образований по передаче нервных импульсов (синапсе), на
уровне изолированных нервных структур возникают существенные отклонения при
воздействии ЭМП малой интенсивности. При этом у людей изменяется высшая нервная
деятельность, память. Эти лица могут иметь склонность к развитию стрессорных
реакций. Определенные структуры головного мозга имеют повышенную
чувствительность к ЭМП. Изменения проницаемости гемато-энцефалического барьера
может привести к неожиданным неблагоприятным эффектам. Особую высокую
чувствительность к ЭМП проявляет нервная система эмбриона.
Иммунная система
В настоящее время накоплено достаточно данных,
указывающих на отрицательное влияние ЭМП на иммунологическую реактивность
организма. Результаты исследований ученых России дают основание считать, что
при воздействии ЭМП нарушаются процессы иммуногенеза, чаще в сторону их
угнетения. Установлено также, что у животных, облученных ЭМП, изменяется
характер инфекционного процесса - течение инфекционного процесса отягощается.
Возникновение аутоиммунитета связывают не столько с изменением антигенной
структуры тканей, сколько с патологией иммунной системы, в результате чего она
реагирует против нормальных тканевых антигенов. В соответствии с этой
концепцией основу всех аутоиммунных состояний составляет в первую очередь
иммунодефицит по тимус-зависимой клеточной популяции лимфоцитов. Влияние ЭМП
высоких интенсивностей на иммунную систему организма проявляется в угнетающем
эффекте на клеточный иммунитет. ЭМП могут способствовать неспецифическому
угнетению иммуногенеза, усилению образования антител к тканям плода и
стимуляции аутоиммунной реакции в организме беременной.
Эндокринная система и нейрогуморальная реакция
В работах ученых России еще в 60-е годы в
трактовке механизма функциональных нарушений при воздействии ЭМП ведущее место
отводилось изменениям в гипофиз-надпочечниковой системе. Исследования показали,
что при действии ЭМП, как правило, происходила стимуляция
гипофизарно-адреналиновой системы, что сопровождалось увеличением содержания
адреналина в крови, активацией процессов свертывания крови. Было признано, что
одной из систем, рано и закономерно вовлекающейся в ответную реакцию организма
на воздействие различных факторов внешней среды, является система гипоталамус -
гипофиз - кора надпочечников. Результаты исследований подтвердили это
положение.
Половая функция
Нарушения половой функции обычно связаны с
изменением ее регуляции со стороны нервной и нейроэндокринной систем. С этим
связаны результаты работы по изучению состояния гонадотропной активности
гипофиза при воздействии ЭМП. Многократное облучение ЭМП вызывает понижение
активности гипофиза.
Любой фактор окружающей среды, воздействующий на
женский организм во время беременности и оказывающий влияние на эмбриональное
развитие, считается тератогенным. Многие ученые относят ЭМП к этой группе
факторов.
Первостепенное значение в исследованиях
тератогенеза имеет стадия беременности, во время которой воздействует ЭМП.
Принято считать, что ЭМП могут, например, вызывать уродства, воздействуя в
различные стадии беременности. Хотя наиболее уязвимыми периодами являются
обычно ранние стадии развития зародыша, соответствующие периодам имплантации и
раннего органогенеза.
Было высказано мнение о возможности
специфического действия ЭМП на половую функцию женщин, на эмбрион. Отмечена
более высокая чувствительность к воздействию ЭМП яичников, нежели семенников.
Результаты проведенных эпидемиологических
исследований позволяют сделать вывод, что наличие контакта женщин с
электромагнитным излучением может привести к преждевременным родам, повлиять на
развитие плода и, наконец, увеличить риск развития врожденных уродств.
Эти системы организма являются критическими.
Реакции этих систем должны обязательно учитываться при оценке риска воздействия
ЭМП на население.
Биологический эффект ЭМП в условиях длительного
многолетнего воздействия накапливается, в результате возможно развитие
отдаленных последствий, включая дегенеративные процессы центральной нервной
системы, рак крови (лейкозы), опухоли мозга, гормональные заболевания.
Особо опасны ЭМП могут быть для детей,
беременных женщин (эмбрион), людей с заболеваниями центральной нервной,
гормональной, сердечно-сосудистой систем, аллергиков, людей с ослабленным
иммунитетом.
5.2 Нормирование уровня ЭМП
На территории российской Федерации нормирование
уровня ЭМП осуществляется в соответствии с СанПиН 2.1.8/2.2.4.1383-03
«Гигиенические требования к размещению и эксплуатации передающих
радиотехнических объектов».
Оценка и нормирование ЭМП диапазона частот  30
кГц - 300 ГГц осуществляется по величине энергетической экспозиции (ЭЭ).
30
кГц - 300 ГГц осуществляется по величине энергетической экспозиции (ЭЭ).
Энергетическая экспозиция в диапазоне частот 30
кГц - 300 МГц рассчитывается по формулам:
ЭЭЕ = Е2·Т, (В/м)2
ч(57)
ЭЭН = Н2·Т, (А/м)2
ч(58)
где Е - напряженность электрического поля (В/м);
Н - напряженность магнитного поля (А/м),
плотности потока энергии (ППЭ, Вт/м , мкВт/см);
, мкВт/см);
Т - время воздействия за смену (час).
Энергетическая экспозиция в диапазоне частот 300
МГц - 300 ГГц рассчитывается по формуле:
ЭЭППЭ =ППЭ·Т, (Вт/м)·ч,
(мкВт/см)·ч(59)
где ППЭ - плотность потока энергии (Вт/м,
мк Вт/см).
ПДУ энергетических экспозиций (ЭЭПДУ)
на рабочих местах за смену представлены в таблице 9.
Таблица 9 - Предельно допустимые уровни ЭМП
диапазона частот 30 кГц-300 ГГц на рабочих местах персонала
|
Параметр
|
Диапазон
частот (МГц)
|
|
0,03
- 3,0
|
3,0
- 30,0
|
30,0
- 50,0
|
50,0
- 300,0
|
300,0
- 300000,0
|
|
ПДУ
ЭЭе, (В/м)2.ч
|
20000
|
7000
|
800
|
800
|
|
ПДУ
ЭЭн, (А/м)2.ч
|
200
|
-
|
0,72
|
-
|
-
|
|
ПДУ
ЭЭппэ, (мкВт/см2).ч
|
-
|
-
|
-
|
-
|
200
|
|
Максимальный
ПДУ Е, В/м
|
500
|
300
|
80
|
80
|
-
|
|
Максимальный
ПДУ Н, А/м
|
50
|
-
|
3,0
|
-
|
-
|
|
Максимальный
ПДУ ППЭ, мкВт/см2
|
-
|
-
|
-
|
-
|
1000
|
|
Примечание.
Диапазоны, приведенные в табл., исключают нижний и включают верхний предел
частоты.
|
Таблица 10 - Предельно допустимые уровни ЭМП
диапазона частот 30 кГц-300 ГГц для населения
|
Диапазон
частот
|
30-300
кГц
|
0,3-3
МГц
|
3-30
МГц
|
30-300
МГц
|
0,3-300
ГГц
|
|
Нормируемый
параметр
|
Напряженность
электрического поля, Е (В/м)
|
Плотность
потока энергии, ППЭ (мкВт/см2)
|
|
Предельно
допустимые уровни
|
25
|
15
|
10
|
3
|
10
(25*)
|
|
*
- для случаев облучения от антенн, работающих в режиме кругового обзора или
сканирования.
|
5.3 Расчет ППЭ
Для расчета воспользуемся формулой: [4]
 ,(60)
,(60)
где P - мощность,
Вт;
G - усиление
антенны (в разах по мощности);
r -
расстояние от точки наблюдения до ближайшей точки антенны, м.
Исходные данные P = 100 мВт, G = 20 дБ =
100 раз.
Подставляя в (60) данные получаем:
 (61)
(61)
На рис. 31 приведена зависимость ППЭ
от расстояния.
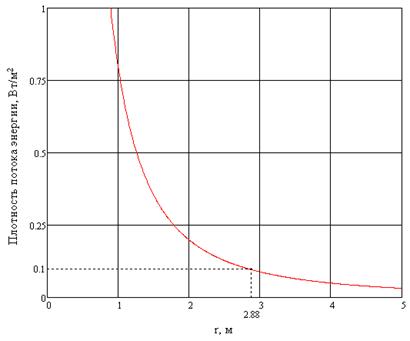
Рисунок 31 - Зависимость ППЭ от
расстояния
Как видно по графику значение ППЭ не
превышает нормы на расстоянии свыше 288 см. Так как антенна используется
направленная, и установка её предполагается на специальной опоре, высота
которой будет больше 3 - 5 метров, или на крыше здания, то в специальных
мероприятиях по защите рабочих и населения от ЭМП нет необходимости. Если антенна
не будет устанавливаться на опору, то необходимым мероприятием по защите
населения и рабочих является наличие санитарной зоны радиусом 4 - 5 метров.
Заключение
Согласно техническому заданию
требовалось разработать радиотехнический метод и аппаратуру высокоточного
контроля геометрической формы плотин гидроэлектростанций.
В результате исследований был
обоснован радиотехнический метод высокоточного контроля геометрической формы
плотин гидроэлектростанций. Перспективность данного метода заключается в новом
принципе определения дальности и высокой инструментальной погрешности (менее 1
м на расстоянии 1 км). Были оценены погрешности и влияние многолучевости.
Оговорены схемотехнические решения для главных элементов устройства,
рассмотрена безопасность и экологичность разработки, дано технико-экономическое
обоснование.
Дальнейшим развитием исследований
является проведение испытаний и проверка способности системы работать с
заданной инструментальной точностью, а так же создание законченного образца.
Так же следует сказать, что дальнейшие испытания макета будут проводиться в
реальных условиях. И в дальнейшем доработка данного образца в связи с
полученными результатами замеров.
Тем не менее, данная работа
представляет собой законченное исследование, в ходе которого получен и решён на
практике ряд новых научно-технических результатов.
Список использованных источников
1
Шайдуров Г. Я. Автоматизированный контроль гидротехнических сооружений. Г. Я.
Шайдуров. - Новосибирск: Наука, 2006. - 240 с.
Козлов
А. Н. Отчет по НИР «Разработка опытно-экспериментальной оптической системы
контроля горизонтальных смещений секций плотины Зейской ГЭС». - Благовещенск:
Амурский государственный университет, 1999. - 12 с.
Алешечкин
А. М., Исаев М. А., Кокорин В. И. Результаты испытаний высокоточной
радионавигационной системы // Труды междунар. науч.-практ. конф. САКС-2002. -
Красноярск: СибГау, 2000. - с. 106-107.
Пестряков
В. Б. Фазовые радиотехнические системы. М.: Сов. радио, 1968, - 364 с.
.
Холодов Ю. А. Мозг в электромагнитных полях [Текст]: научно - популярная серия
/ Ю. А. Холодов. - М.: Наука, 1982. 123 с.
.
СанПиН 2.1.8/2.2.4.1383-03 «Гигиенические требования к размещению и
эксплуатации передающих радиотехнических объектов». Изменение № 1 - СанПиН
2.1.8/2.2.4.2302-07.
.
СанПиН 2.1.8/2.2.4.2302-07 «Гигиенические требования к размещению и
эксплуатации передающих радиотехнических объектов».
.
Ротхаммель К. Антенны: Прес. с нем. / К. Ротхаммель. - 3 -е изд., доп. - М:
Энергия, 1979. 200 с., ил.
.
Бондаренко В. Н. Радиоавтоматика: Метод. указ. по курсовому проектированию для
студентов специальности 2301 "Радиоавтоматика" / В.Н. Бондаренко;
Краснояр. политехн. ин-т. - Красноярск: КрПИ, 1992. - 32 с.
.
Бондаренко В. Н. Радиоавтоматика. Исследование системы фазовой автоподстройки
частоты: метод. указ. по лабораторным работам / В.Н. Бондаренко; Краснояр.
политехн. ин-т. - Красноярск: КрПИ, 1993. - 11 с.
.
Коновалов Г. Ф. Радиоавтоматика [Текст] : учеб. для вузов по спец.
"Радиотехника" / Г. Ф. Коновалов. - М.: Высшая школа, 1990. - 334 с.
.
Коновалов Г. Ф. Радиоавтоматика: учебник для вузов / Г. Ф. Коновалов. - М.:
Радиотехника, 2003. - 286 с.
.
Бондаренко В. Н. Основы автоматики: учеб. пособие / В.Н. Бондаренко; Краснояр.
гос. техн. ун-т. - Красноярск: ИПЦ КГТУ, 2004. - 155 с
.
Головин, О. В. Радиоприемные устройства: Учебник для техникумов / О.В. Головин.
- М.: Высшая школа, 1997. - 384 с.
.
Радиоприемные устройства: учебник для вузов / Н.Н. Фомин, О.В. Головин, Н.Н.
Буга и др.; Ред. Н.Н. Фомин. - 2-е изд., перераб. и доп. - М. : Радио и связь,
2003. - 515 с.
.
Радиотехнические системы: учеб. для студ. вузов по спец.
"Радиотехника" / Ю. М. Казаринов. - М.: Высшая школа, 1990. - 496 с.
.
Радиотехнические системы: учебник для студентов вузов / Ю. М. Казаринов [и
др.]; ред. Ю. М. Казаринов. - М.: Академия, 2008. - 590 с.
.
Сосулин Ю. Г. Теоретические основы радиолокации и радионавигации: учеб. пособие
для радиотех. спец. вузов / Ю. Г. Сосулин. - М.: Радио и связь, 1992. - 304 с.
.
Первачев С. В. Радиоавтоматика: учебник для вузов / С. В. Первачев. - М.: Радио
и связь, 1982. - 295 с.
.
Каганов В. И. Радиотехника + компьютер + Mathcad.
М.: Горячая линия - Телеком, 2001. - 416 с.
.
Поляков В. Т. Радиовещательные ЧМ приемники с фазовой автоподстройкой. М.:
Радио и связь, 1983. - 96 с.
.
Радиопередающие устройства: учебник для вузов по спец. "Радиосвязь и
радиовещание" / Л. Е. Клягин [и др.]; ред. В. В. Шахгильдян. - М.: Связь,
1980. - 328 с
.
Шахгильдян В.В., Ляховкин А.А. Системы фазовой автоподстройки частоты. М.:
Связь, 1972. - 447 с.
.
Мусьяков М. П. Оптико-электронные системы ближней дальномерии / М. П. Мусьяков,
И. Д. Миценко. - М.: Радио и связь, 1991. - 166 с.
.
Устройства приема и обработки сигналов: учеб. пособие. - Красноярск -
Санкт-Петербург: ИПЦ КГТУ. Кн.1. - 2-е изд., стереотип. - 2003. - 136 с.