Системы компенсации внешних возмущений
Введение
Предметом этой учебно-исследовательской работы является обзор систем
компенсации внешних возмущений, их сравнение, анализ преимуществ и недостатков.
Представлены различные пассивные и активные системы виброзащиты, разобран
принцип их действия, конструктивные особенности, а так же достоинства и
недостатки.
Вибрация сопровождает работу почти каждой машины. Она особенно интенсивна
в машинах, в которых вибрационные явления способствуют интенсификации
технологических процессов. Однако вредное влияние вибрации на человека
сдерживает дальнейшее развитие этих машин. Вследствие увеличения вибрации при
возрастании скорости различных транспортных, строительных, дорожных,
сельскохозяйственных и других машин ограничиваются предельные скорости, что
приводит к значительным потерям транспортного времени.
Повышенные требования к современным быстроходным машинам и оборудованию
по обеспечению высокой работоспособности и надежности при одновременном
уменьшении их материалоемкости привели к необходимости изучения интенсивности
вибрации и шума. Так как увеличение мощности и скоростных параметров
оборудования приводит к возрастанию динамических нагрузок, следовательно,
вибрационной активности. Источником вибрации и шума являются колеблющиеся
твердые, жидкие и газообразные тела. Как правило, сложные колебательные
процессы, происходящие в машинах и оборудовании, образуют вибрацию и шум, что
оказывает вредное влияние на саму машину, на организм человека-оператора, а
также на окружающую среду.
Колебания в машинах иногда могут быть полезными, но в основном они
являются вредными: понижают надежность и долговечность машин, ускоряют износ
деталей машин, вызывают шум, а это в свою очередь приводит к спаду
производительности на предприятии. Поэтому снижение вибрации и шума остается также
одной из приоритетных задач предприятий в плане повышения качества выпускаемой
продукции и производительности труда.
1 Постановка задачи компенсации внешних возмущений
Рассмотрим произвольную механическую систему (рис. 1.1), к которой
приложены динамические воздействия, силовые и кинематические. Силовыми
воздействиями являются переменные во времени силы, приложенные в точках В1, …, Bk; проекции этих сил на оси координат F1(t), …, F3k(t), образуют 3k-мерный вектор F(t). Кинематические воздействия представляют
собой перемещения некоторых точек A1, …, As, являющиеся заданными функциями
времени. Проекции этих перемещений ξ1(t), …, ξ3s(t) на оси координат образуют 3s-мерный вектор ξ(t). Если перемещения материальных точек системы, вызванные
динамическими воздействиями, носят колебательный характер, то говорят, что в
этой системе возникает вибрационное поле перемещений. Очевидно, что при этом
образуются также вибрационные ноля скоростей, ускорений, усилий, механических
напряжений и т. п.
Рисунок 1.1
Существует два основных метода виброзащиты. Первый метод состоит в
присоединении к защищаемому объекту других механических систем (рис. 1.2, а),
параметры которых выбираются таким образом, чтобы обеспечивалось уменьшение
колебаний основной системы. Такой способ называется динамическим гашением, а
присоединенные системы - динамическими гасителями. Второй метод заключается в
разделении исходной системы на две части и в соединении этих частей
дополнительными механическими системами (рис. 1.2, б).
Рисунок 1.2
Этот метод называется виброизоляцией или амортизацией, а устройства,
соединяющие две части системы - виброизоляторами или амортизаторами. Обычно при
разделении системы одна из ее частей оказывается «свободным» телом, не
соединяющимся с какими-либо другими, эту часть принято называть амортизируемым
объектом, а вторую, связанную с другими телами, - основанием или несущим,
телом. Если динамические воздействия приложены к основанию, то целью амортизации
является защита амортизируемого объекта, если же воздействия непосредственно
приложены к объекту, то амортизаторы обеспечивают защиту основания.
Системы, состоящие из масс, упругих и демпфирующих элементов, называются
пассивными, гашение вибрации в такой системе происходит за счет рассеяния
энергии в пассивном элементе. Активными устройствами называются системы,
содержащие элементы систем автоматического управления и, как правило,
обладающие дополнительными источниками энергии, создающими вторичные
противофазные колебания.
В зависимости от вида функциональных связей между информацией о вибрации,
поступающей на регулятор, и управляющим воздействием виброзащитные системы
делятся на непрерывного и дискретного типов, а по наличию априорной информации -
на обыкновенные и адаптивные.[1]
На рисунке 1.3 представлена предлагаемая авторами классификация
виброзащитных систем (ВЗС) по ряду признаков исходя из методов и способов
виброзащиты, характера применяемых устройств и управлений [2].
Рисунок 1.3 Классификация виброзащитных систем
2. Обзор пассивных систем виброзащиты
Все динамические виброгасители (ДВГ) разбиваются на два класса по
характеру контакта с объектом и на три ряда по признаку наличия дополнительных
упругих и вязкостных звеньев. По таким признакам составлена таблица ДВГ
(таблица 2.1).
Различают 17 видов ДВГ. Виды 1-4 относятся к непостоянному контакту между
ДВГ и объектом. По характеру режима движения гасителя их называют
виброударными. Виды 5-17 имеют постоянный контакт между ДВГ и объектом
виброгашения. Виды 5-12 объединены одним признаком: масса ДВГ совершает
вращательное движение, причем масса ДВГ видов 5-7 вращается за счет геометрии
полости, в которой заключена, а масса ДВГ видов 8-12 за счет кинематического
звена, связывающего массу с объектом виброгашения. Виды 13-17 характеризуются
поступательно движущейся массой ДВГ, постоянно связанной с объектом
виброгашения.
В первый ряд ДВГ, у которых отсутствуют дополнительные упруговязкостные
звенья, входят ДВГ видов 1, 5, 8, 13. Виброударные ДВГ вида 1 являются в своем
роде «вырожденными» с поступательно движущейся массой. „Вырождение"
заключается в исчезновении связывающих звеньев. К второму ряду Д13Г, которым
присуши дополнительные упруговязкостные звенья, относятся ДВГ видов 2, 6,
9-11,14-16 - это самый многочисленный ряд. В третий ряд ключены ДВГ видов 3, 4,
7, 12, 17. У них имеются дополнительные вязкостные звенья.
Приведем ориентировочное описание основных механических схем ДВГ.
Предполагаем, что масса всех ДВГ одинакова. Наибольшей простотой обладает ДВГ
вида 1, однако с его помощью невозможно обеспечить идеального виброгашения при
воздействии моногармонической силы, даже если пренебречь потерями в системе.
При воздействии некоторых типов полигармонических сил можно будет достичь
удовлетворительного виброгашения. ДВГ вида 1 обладает еще одним недостатком:
места контакта подвергаются интенсивному износу и возникает шум.
Для снижения износа, а также устранения шума применимы виброударные ДВГ
вида 2. Здесь контакт происходит не мгновенно, а длится достаточный отрезок
времени, в течение которого масса ДВГ после контакта с дополнительной пружиной
движется вместе с ней. Если пренебречь потерями в ДВГ вида 2, то окажется, что
они также не осуществляют полного виброгашения при моногармонической внешней
силе. Однако расширяются возможности и повышается качество виброгашения при
действии полигармонической силы. ДВГ вида 2 могут иметь две модернизации,
которые соответственно представлены на эскизах а, б в табл. 1.1.
Таблица 2.1 Классификация динамических виброгасителей
В ДВГ видов 3 и 4 существуют только вязкостные звенья, причем в ДВ1 вида
3 они выступают в роли жестких ограничителей, т. е. масса ДВГ ударяется о
жесткий ограничитель, а удар вызывает перемещение ограничителя. В ДВГ вида 4
эти ограничители сами по себе обладают вязкостными свойствами. Такие ДВГ также
не гасят полностью колебаний объекта, вызванных моногармонической силой.
В ДВГ вида 5 шарик (масса ДВГ) обкатывается в круговой жесткой полости.
Непрерывный контакт шарика с полостью обеспечивается за счет геометрических
свойств шарика и полости, а также при определенных соотношениях между
физическими параметрами системы и возбуждениями. Можно считать, что между
шариком и поверхностью круглой обоймы существует сила трения качения.
В ДВГ вида 6 сама полость - обойма, которую считаем практически
невесомой, соединена с объектом с помощью упруговязкостных элементов, а в ДВГ
вида 7 полость связана с объектом посредством только вязкостных звеньев. В ДВГ
вида 8 вращающаяся масса ДВГ представляет собой дебаланс, поэтому считаем, что
в ДВГ присутствуют силы сопротивления трению качения. Опора вращающегося звена
жестко скреплена с массой объекта виброгашения.
В ДВГ вида 9 опора вращающегося звена соединена с массой объекта с
помощью упруговязкостных элементов. В ДВГ вида 10 масса связана с вращающимся
звеном посредством упругого элемента, а опору вращающегося звена можно жестко
расположить на объекте виброгашения (как в ДВГ вида 8) или ввести
упруговязкостные элементы (как в ДВГ вида 11). В ДВГ вида 12 опора вращающегося
звена опирается на объект виброгашения только через вязкостные элементы.
ДВГ вида 14 является, образно говоря, «родоначальником» систем
динамического виброгашения: здесь масса ДВГ связана с объектом виброгашения с
помощью упруговязкостных элементов. Во втором подклассе (ДВГ с постоянным
контактом с объектом) и первом классификационном ряду (дополнительные
упруговязкостные звенья отсутствуют) находится ДВГ, движущийся но наклонно
установленным пазам (желобам). Для устранения кошевого виброударного эффекта
пазы в концевых частях имеют плавные сужения.
На ДВГ вида 15 тоже остановимся подробно и укажем, что масса ДВС
соединена с массой объекта виброгашения двояким образом: во-первых, как и в ДВГ
вида 14, с помощью пружинного элемента, а во-вторых, посредством
дополнительного качающегося рычага и пружинного элемента. Качающийся рычаг
можно выполнить в виде зубчатой рейки, входящей в зацепление с зубчатым
колесом. По существу здесь вводится устройство для преобразования движения.
Масса ДВГ вида 16 (например 1) движется перпендикулярно (в некотором
приближении) к линии перемещения объекта 3. Контакт ДВГ происходит через
элемент 4 (или 5 для массы 2), входящий в обойму 7, принадлежащую объекту
виброзащиты. Виброгашение достигается за счет использования двух эффектов: при
должной настройке массы 1 и 2 входят в параметрический резонанс и колеблются в
противофазе, что способствует (при изгибах упругих стержней 4 и 5) заклиниванию
объекта 3 и увеличению сил трения в обоймах 7. Масса ДВГ вида 17 связана через
вязкостные элементы с объектом виброгашения.
Проведем качественный сопоставительный анализ основных видов ДВГ.
Допускаем, что при отсутствии ДВГ объект совершает резонансные колебания. При
этих условиях присоединение виброударного ДВГ вида 1 должно производиться
исходя из условия равенства эквивалентной парциальной частоты ДВГ основной
частоте возбуждения. Полное виброгашение объекта на основной частоте
невозможно, т.е. нереально, чтобы амплитуда колебаний объекта была бы равна
нулю. Это происходит при использовании виброударного гасителя по двум причинам:
во-первых, при соударении гасителя об объект возбуждаются колебания других (как
правило, высших) гармоник, а во-вторых, амплитуда колебаний объекта по основной
гармонике не может исчезнуть из-за потерь энергии в гасителе. Эта амплитуда D
равна
D = 0,407 (1 -R2)σ (2.1)
где R - коэффициент восстановления скорости гасителя при ударе;
σ - зазор при симметричном расположении
массы ДВГ.
Однако ДВГ виброударного типа имеет неоспоримое преимущество при защите
объектов, на которые действует сила с изменяющейся основной частотой.
В объектах с ДВГ видов 5 и 8 может происходить абсолютное виброгашение,
если предположить, что отсутствует диссипация энергии при движении гасителя.
Для настройки ДВГ этих видов безразлична частота возбуждения, однако радиус
полости r зависит от амплитуды A объекта до постановки ДВГ и от
соотношения между массой М1 объекта и массой М2 виброгасителя. Для ДВГ вида 14
абсолютное виброгашение (также при пренебрежении диссипацией энергии при
движении ДВГ) достигается только для одной частоты, разыскиваемой по
соотношению
 (2.2)
(2.2)
где k2 - коэффициент жесткости пружин ДВГ.
Таким образом, ДВГ каждого (из основных) вида обладает как
преимуществами, так и недостатками [2].
3. Обзор активных систем виброзащиты
виброзащита гидравлический пневматический виброизоляция
Методы виброзащиты, связанные с использованием пассивных элементов,
инерционных, упругих и диссипативных, во многих случаях оказываются
неэффективными. Они не могут в полной мере обеспечить выполнение сложных и, как
правило, противоречивых требований, предъявляемых к виброзащитным устройствам.
В связи с этим чаще применяются так называемые активные системы, являющиеся, по
существу, системами автоматического управления движением амортизируемых тел, обладающими
обычно независимыми источниками энергии.
Обычно эффективность виброзащиты пассивных подвесок проявляется при
частотах возмущающего воздействия, несколько превышающих резонансную частоту. В
простых пассивных виброзащитных системах на резонансной частоте амплитуда
колебании и связанные с ней ускорения значительно превышают уровень возмущающих
воздействий на основании.
Снижение резонансной частоты пассивных подвесок в результате уменьшения
жесткости упругого элемента имеет ряд ограничений эргономического и
технического характера. Поэтому даже самые совершенные пассивные виброзащитные
системы, применяемые в настоящее время на различных машинах, обеспечивают
эффективное виброгашение частот, составляющих 3 Гц и более. К менее
существенным недостаткам пассивных виброзащитных систем относят, например,
такие, как чувствительность подвески к весу изолируемого от вибрации объекта, а
также чувствительность к внешним силам. Для обеспечения высокой эффективности
виброзащиты оператора от низкочастотных возмущающих воздействий в последнее
время стали создавать активные виброзащитные системы. Их применение может быть
оправдано на тяжелых машинах, например скреперах, на которых основные частоты
возмущающего вибрационного воздействия составляют 0,5.. .0,8 Гц.
Активные виброзащитные системы представляют собой следящие системы,
которые осуществляют движение каркаса и объекта виброзащиты в противофазе
относительно вибрирующего основания. Эти системы стремятся обеспечить
абсолютную в вертикальном направлении неподвижность объекта виброзащиты при
наличии вертикальных перемещений основания.
Как и всякие следящие системы, активные виброзащитные системы требуют для
функционирования подвода энергии. Эта особенность и объясняет, почему подобные
системы называют активными. Кроме того, активность системы связана также с
принудительным перемещением объекта виброзащиты относительно вибрирующего
основания на основании информации или сигналов управления, снимаемых с
соответствующих датчиков.
Несмотря на относительную сложность и более высокую стоимость по
сравнению с пассивными системами, активные системы виброзащиты имеют ряд
достоинств, позволяющих прогнозировать их широкое применение в тех случаях,
когда пассивные подвески не могут обеспечить эффективной виброзащиты, особенно
низкочастотной.
Применение активных систем позволяет получить:
очень малую жесткость при колебательном возбуждении (с
собственной частотой, значительно меньшей, чем у обычных пассивных систем);
высокую жесткость по отношению к постоянно действующей нагрузке;
нулевые статические смещения;
возврат изолируемой массы в исходное положение при стационарной
и случайной нагрузках;
независимость работы системы от изменения изолируемой массы;
одно- и двухстороннюю характеристики жесткости;
требуемые формы амплитудно-частотных характеристик;
возможность адаптивного управления путем использования
упреждающей обратной связи.
На рисунке 3.1 приведена структурная схема активной виброзащитной системы
[2]. Исполнительное устройство формирует регулирующее воздействие V (t), которое в общем случае может быть записано как
(t) =Fl[x(t) + F2[g(t)] +F3[f(t)] (3.1)
где F1 F2, F3 - некоторые в общем случае нелинейные функции от ошибки х,
задающего g и возмущающего f
воздействий соответственно, а также их производных и интегралов по времени.
В соответствии с этим активные системы могут быть с управлением трех
типов: по обратной связи; по внешнему воздействию; комбинированным.
Качественные показатели систем первого типа ограничены устойчивостью
регулятора. При управлении по внешнему воздействию необходима информация о
характере этого воздействия, что в некоторых случаях является трудновыполнимой
и технически сложной задачей (например, при случайных возмущениях). Введение в
систему обратной связи управления по внешнему воздействию (комбинированное
управление) позволяет улучшить качественные показатели и получить систему,
инвариантную по отношению к этому воздействию.
Рисунок 3.1 Структурная схема активной виброзащитной системы.
Управление регулятором можно осуществлять по перемещению, скорости,
ускорению, резкости, интегралу по перемещению или их комбинациям. Выбирая
соответствующую структуру, можно добиться эффективной работы виброзащитной
системы в широком частотном диапазоне.
В зависимости от физической природы исполнительного устройства активные
системы могут быть механического, гидравлического, пневматического,
электромагнитного типов или их сочетаниями.
.1 Гидравлическая система активной виброизоляции
На практике для активной виброзащиты наиболее широко используют
гидравлические системы дроссельного регулирования, обладающие сравнительно
высоким быстродействием и подтвердившие хорошие эксплуатационные свойства в
аналогичных системах автоматического управления[3].
На вибрирующем основании 10 закреплен гидроцилиндр 4. К штоку которого
прикреплен каркас 6 виброзащитной системы. Гидроцилиндр управляется
электрогидравлическим усилителем 8 от электрического усилителя 9, который
содержит суммирующее и корректирующие устройства. На каркасе 6 размещен объект
виброзащиты 5. На нем также закреплен датчик абсолютного ускорения 7 объекта
виброзащиты.
Рисунок 3.2 Схема электрогидравлической системы активной виброзащиты: 1 -
датчик абсолютного ускорения основания; 2 - датчик относительного перемещения;
3 - датчик относительной скорости; 4 - гидроцилиндр; 5 - объект виброзащиты; 6
- каркас; 7 - датчик абсолютного ускорения объекта; 8 - электрогидравлический
усилитель; 9 - электрический усилитель; 10 - основание
Второй датчик абсолютного ускорения 1 основания установлен на основании
10. На принципиальной схеме показан также датчик относительного перемещения 2,
который измеряет отклонение каркаса 6 от его нейтрального положения
относительно основания 10, а также датчик относительной скорости 3,
регистрирующий скорость перемещения каркаса 6 относительно основания 10.
Сигналы с датчиков поступают на вход электрического усилителя 9.
В настоящее время активные электрогидравлические системы виброзащиты
принято разделять по признаку установки акселерометра. Электрогидравлическая
система виброзащиты, в которой в качестве основного управляющего сигнала
используется сигнал,
снимаемый с акселерометра, установленного на каркасе системы, является системой
с управлением по сигналу ускорения объекта виброзащиты, т. е системой
управления по отклонению выходной величины.
Электрогидравлические виброзащитные системы, в которых используют для
управления сигналы с акселерометра, установленного на основании, являются
системами управления по возмущающему воздействию.
Существуют также электрогидравлические системы виброзащиты с
комбинированным управлением, когда применяют для управления сигнал, снимаемый
как с акселерометра, установленного на каркасе системы, так и с акселерометра,
установленного на основании.
Применение электрогидравлических виброзащитных систем активного типа
обусловлено рядом их достоинств, которые в основном сводятся к следующему.
. Возможность создания активных электрогидравлических виброзащитных
систем из готовых стандартных элементов, применяющихся в других аналогичных
системах. Это обстоятельство послужило, пожалуй, одной из основных причин
создания первых активных гидравлических систем виброзащиты в виде
электрогидравлических.
. Возможность простого и оперативного изменения параметров
электрогидравлических виброзащитных систем в процессе настройки благодаря
изменению параметров электрической системы управления.
. Электрогидравлические активные виброзащитные системы удобны при
отработке принципа действия и алгоритмов управления.
. Возможность гибкого формирования амплитудно-частотной характеристики
виброзащитной системы.
. Возможность эффективного гашения низкочастотных колебаний, возникающих
на остове (основании) машины. С этой точки зрения некоторые схемы
электрогидравлических активных виброзащитных систем являются наиболее эффективными
среди других активных систем низкочастотной виброзащиты.
Недостатком гидравлических устройств является нестабильность свойств
рабочей жидкости, зависящих от температуры и от эмульсирования жидкости
воздухом. Последнее обстоятельство резко повышает сжимаемость жидкости и
существенно влияет на динамическую характеристику системы.
.2 Пневматическая система активной виброизоляции
Пневматические исполнительные устройства могут иметь различную
конструкцию. В одних случаях исполнительным органом может являться цилиндр
двойного действия, давление в камерах которого регулируется золотниковым или
струйным распределительным устройством; в других случаях используются проточные
камеры, давление в которых изменяется с помощью различных дроссельных устройств
(например, типа «сопло - заслонка»). Кроме рабочих камер, объем которых
ограничен с одной стороны подвижным элементом (поршнем или мембраной), в
пневматических системах используются также камеры постоянного объема,
соединяющиеся дросселями с рабочими камерами[4].
На рисунке 3.3 показана схема пневмомеханической виброзащитной системы с
пневматическим возбудителем (силовым цилиндром) двойного действия. Механическая
обратная связь по смещению через золотниковое устройство управляет расходом
газа, подаваемым внешним источником энергии. Вследствие наличия обратной связи
по смещению, перемещающей золотник, выходное усилие возбудителя является
функцией интеграла относительного смещения. Управление по интегралу от смещения
может быть эффективным только на очень низких частотах. Поэтому обратная связь
по смещению используется лишь для позиционирования защищаемого объекта.
Качество же защиты от вибраций и ударов определяется жесткостью и
демпфированием пассивной пневматической системы. Система сравнительно мало
чувствительна к изменению величины изолируемой массы.
Демпфирование пневмомеханической виброзащитной системы может быть
регламентировано с помощью специальных дросселей, отделяющих полости
пневмовозбудителя от дополнительных емкостей. Применение дополнительных
емкостей позволяет снизить собственную частоту системы (до 0,5-20 Гц) и может
обеспечить надежное управление резонансными колебаниями сжимаемого газа в
пневмовозбудителе[5].
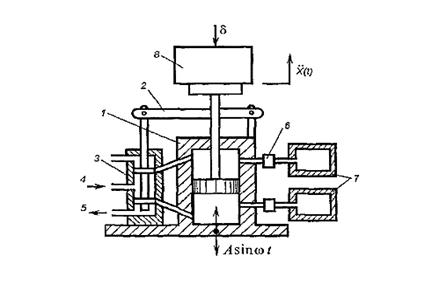
Рисунок
3.3 Схема пневматической CAB: 1 - пневмомеханический возбудитель; 2 -
механическая обратная связь по смещению; 3 - сервоклапан; 4 - входной канал; 5
- выходной канал; 6 - дроссель; 7 - емкость; 8 - изолируемый объект
Пневматические,
а также гидравлические системы, предназначены для гашения низкочастотных
вибраций и компенсации медленно меняющихся нагрузок. Они характеризуются
высокой эксплуатационной надежностью, большими усилиями, а также широкими
возможностями управления, обеспечиваемые электромеханическими датчиками.
3.3 Электромагнитная система активной виброизоляции
В отличии от пневматических систем, позволяющих получать малые величины
статической жесткости. Электромагнитные системы обладают малой инерционностью и
позволяют в широких пределах варьировать амплитудно-частотные характеристики.
Электромагнитные системы активной виброзащиты, тем самым пытаются убрать
серьезное ограничение применения метода активной виброзащиты - невозможность
обеспечения широкой частотной полосы гашения различных мод.
Но, конечно же, при расширении рабочей полосы частот возникают условия
для положительной обратной связи, и вместо ослабления наступает неустойчивая
работа системы, а на некоторых частотах даже самовозбуждение, проявляющееся в
резком возрастании амплитуд колебаний системы.
В качестве устройства, формирующего силу, может быть использован
электромагнит. Простейшая схема исполнительного устройства с электромагнитом
показана на рисунке 3.4. Здесь входной переменной является напряжение u (t).
Корпус электромагнита крепится к основанию, а якорь - к амортизируемому
объекту. При относительном перемещении объекта изменяется величина зазора между
сердечником и якорем; при этом изменяется индуктивность L электрической цени,
которая, таким образом, оказывается нелинейной функцией от у. Сила, создаваемая
электромагнитом, пропорциональна квадрату силы тока и нелинейно зависит от
величины зазора.
Рисунок 3.4. Схема исполнительного устройства с электромагнитом
В общем случае справедлива формула
 (3.2)
(3.2)
Где
 -
магнитная проницаемость, S - площадь якоря, i - сила тока,
-
магнитная проницаемость, S - площадь якоря, i - сила тока,  (△ - у) - некоторая нелинейная функция.
(△ - у) - некоторая нелинейная функция.
В
свою очередь сила тока определяется из дифференциального уравнения
электрической цепи

 [L(y)i] = u(t)- ri,
(3.3)
[L(y)i] = u(t)- ri,
(3.3)
где r - активное сопротивление. Система уравнений определяет динамическую
характеристику системы, т. е. зависимость силы U от законов изменения u(i) и
y(t)
В данной схеме (на рисунке 3.5) используется комбинация пассивных 3 и
активных 8 амортизаторов. Пассивные амортизаторы хорошо компенсируют возмущения
на низких частотах, а активные - на высоких. Это обстоятельство позволяет
использовать электромагнитную системы в широкополосном диапазоне частот.
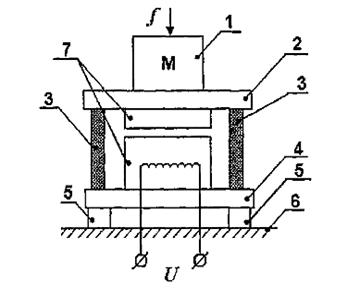
Рисунок3.5.
Схема электромагнитной системы активной виброзащиты: 1 - источник вибраций
массой М; 2 - подвижная платформа; 3 - пассивные амортизаторы; 4 - неподвижная
платформа; 5 - датчики силы; б - виброизолируемое основание; 7 - электромагнит
Достоинством
электромагнитной системы активной виброзащиты являются: высокая стабильность
характеристик; большое быстродействие (в сравнении с гидравлической и
пневматической симстемами); хорошая сочетаемость с упругими амортизаторами и
допустимость существенных боковых смещений подвижной платформы относительно
виброизолируемого основания. Последнее свойство, обусловленное конструктивной
особенностью электромагнитных систем, существенно расширяет область их
применения.
.4
Электромеханическая система активной виброизоляции с самотормозящейся передачей
Электромеханическая
система виброизоляции, предназначенная для защиты от инфранизких частот,
обладает преимуществами электрогидравлической системы и лишена указанных выше
недостатков. Однако, частотный диапазон действия значительно уже, и следует
ожидать, что система будет работоспособной до частот не более 5- 10 Гц.
Отличительной
особенностью электромеханической системы является выполнение силового привода в
виде электрической следящей системы, воздействующей на исполнительный механизм.
Электрическая следящая система включает: усилитель, вращательный двигатель
постоянного тока, датчики обратной связи и регулятор.
Главной
особенностью является наличие самотормозящейся пары в механизме передачи
движения от двигателя к объекту. Это обеспечивает нечувствительность системы к
возмущениям со стороны объекта, жесткую фиксацию при неработающем
электродвигателе, что соответствует концепции системы виброизоляции
кинематического принципа действия[7].
3.3.1
Система с парой «винт-гайка»
Выполнение
исполнительного механизма в виде ходового винта и гайки с ходовой резьбой
самотормозящегося типа и направляющего элемента, обеспечивающего отсутствие
проворота гайки, приводит к следующей схеме, рисунок 3.6.

Рисунок
3.6. Схема электромеханической системы с парой «винт-гайка»
Система
виброизоляции расположена между объектом и вибрирующим основанием и состоит из
акселерометров, датчика относительного перемещения, регулятора, усилителя
мощности, электродвигателя постоянного тока, исполнительного механизма,
состоящего из ходового винта и гайки, и направляющего элемента.
Акселерометры,
располагаемые на объекте и основании, и датчик относительного перемещения,
располагаемый между объектом виброзащиты и основанием, соединены со входом
регулятора, выход которого связан со входом электрической следящей системы, состоящей
из последовательно соединенных усилителя мощности и управляющей обмотки
исполнительного двигателя, закрепленного на основании.
Электрические
сигналы акселерометров и датчика относительного перемещения поступают в
регулятор, сигнал из которого поступает на вход электрической следящей системы,
управляющей поворотом ротора исполнительного двигателя. Двигатель вращает винт
и гайка перемещается в направляющем элементе, изменяя положение объекта
относительно основания. Ходовая резьба в паре «винт-гайка» является
самотормозящейся, чем достигается нечувствительность предлагаемой системы
виброизоляции к силам, действующим со стороны объекта. Наличие направляющих в
механизме обеспечивает отсутствие поворота гайки.
.3.2
Система с червячной передачей на базе параллелограммного механизма
Направляющие
устройства, необходимые для работы системы с парой «винт-гайка», являются
поступательными кинематическими парами. Это приводит к значительным силам
трения за счет скольжения и вызывает проблемы схватывания и заедания.
Поэтому,
аналогичное по смыслу схемно-техническое решение, но реализуемое на
вращательных кинематических парах, является более целесообразным. Такое решение
представлено на рисунке 3.7 и основано на использовании параллелограммного
механизма, хотя не исключена возможность применения плоских четырехзвенников
других типов.
Для
использования реверсивного вращательного электродвигателя постоянного тока с
независимым возбуждением и по возможности более высокой частотой вращения
применена червячная передача с большим передаточным отношением, которая
позволяет электродвигателю сделать значительное число оборотов в одном
направлении и обеспечивает свойства самоторможения.
На
схеме, рисунок 3.7, червячное колесо жестко соединено с парой нижних рычагов
параллелограммного механизма. Таким образом, нижние рычаги поворачиваются от
приводного механизма «двигатель-червячная передача» принудительно, и
реверсивное вращение от электродвигателя передается червяку, а червячное колесо
и рычаги параллелограммного механизма приводятся в качательное движение.
Положение между объектом виброзащиты и основанием изменяется принудительно. В
остальном используется принцип системы виброизоляции кинематического принципа
действия посредством акселерометров на объекте и на основании. Сигналы датчиков
суммируются в регуляторе, выходной сигнал которого управляет усилителем
мощности, а тот, в свою очередь,- управляющими обмотками электродвигателя.
Рисунок
3.7. Схема электромеханической системы с червячной передачей на базе
параллелограммного механизма
Заключение
В
данной работе был сделан обзор литературы на тему «системы компенсации внешних
возмущений». В обзоре раскрыт смысл понятия «виброзащитная система», указана
классификация виброзащитных систем и сферы их систем, рассмотрены системы
виброизоляции различных конструкций, применяющиеся в различных сферах, имеющие
свои достоинства и недостатки, представлены основные принципы регулировки
управления системами.
Подходы
к решению задачи компенсации внешних возмущений делятся на две группы по
признаку наличия источника энергии, для создания вторичных противофазных
вибрационных полей: активные и пассивные системы.
Было
выяснено, что активные системы виброзащиты позволяют существенно повысить
эффективность подавления вибраций на низких частотах, а их свойства могут
изменяться в связи с изменениями условий функционирования. Основными
недостатками активных виброзащитных систем можно назвать их конструкторскую
сложность, что влечет меньшую надежность в эксплуатации, безусловно большую
стоимость относительно пассивных систем, сложность обеспечения подавления
вибраций на высоких и низких частотах одновременно.
Методы
пассивной виброзащиты основаны на рассеивании энергии вибраций с помощью
диссипативных материалов и устройств. Например, с помощью амортизаторов,
демпферов, упругих прокладок. Недостатками пассивных систем являются
невозможность изменения свойств и подстройки системы, неэффективность при
вибрациях низкой частоты.
Учитывая
недостатки обоих классов систем, получил распространение принцип использования
комбинации пассивной и активной систем. Системы, сконструированные по этому
типу, содержат пассивные амортизаторы и систему активного подавления вибраций.
Пассивные амортизаторы подавляют высокочастотные колебания и рассеивают часть
энергии, вследствие чего, мощность, требуемая на возбуждение колебаний в
активной системе, может быть значительно снижена по сравнению с активными
системами виброзащиты прямого действия.
В
результате теоретического обзора был сделан вывод об актуальности развития
виброзащитных систем сейчас и о перспективах в будущем. Были разобраны основные
теоретические вопросы, необходимые для эффективной виброизоляции.
Литература
1.
Коловский М.З. Автоматическое управление виброзащитными систе-мами. - М.:
"Наука", 1976. - 320 с
. Пассивная
и активная виброзащита судовых механизмов / А.Божко / Судостроение, 1987. -176
с.
. Чупраков
Ю.И. Гидравлические системы защиты человека-оператора от общей вибрации. М.:
Машиностроение, 1987. - 87 с.
. Колесников
А.Е. Шум и вибрация: Учебник. - Л.: Судостроение, 1988. - 248 с.
. Фролов
К.В., Фурман Ф.А. Прикладная теория виброзащитных систем. - М.: Машиностроение,
1980. 276 с.
. Кравчун
П.Н. Генерация и методы снижения шума и звуковой вибра-ции. - М.: Изд-во МГУ,
1991. - 184 с.