Исследование наноструктурированной поверхности на АСМ Solver HV
ВВЕДЕНИЕ
Целью курсовой работы является изучение
принципов сканирующей зондовой микроскопии, получение навыков работы на АСМ
SOLVERHV.
Преимущество АСМ SOLVER HV состоит в том, что
система позволяет проводить параллельно с изучением топографии поверхности
исследуемого образца физические, магнитные, электрические и электростатические
характеристики наноструктурированной поверхности.
В первую очередь наноструктурированные
поверхности используются в качестве подложек для создания различных пленочных
покрытий, свойства которых зависят от рельефа поверхности. В связи с этим
основными задачами являются исследование рельефа наноструктурированных
поверхностей, а также изучение взаимосвязи рельефа пленочных покрытий с
рельефом подложек. Благодаря высокому пространственному разрешению основным
инструментом для изучения рельефа поверхности в нанометровом масштабе на
сегодняшний день является атомно-силовая микроскопия (АСМ).
Однако при использовании этого метода при
исследовании наноструктурированных поверхностей возникает ряд проблем,
связанных с низкой развитостью их рельефа и необходимостью учета малых
аппаратных искажений метода АСМ. Требуется развитие методов описания
статистических свойств нанорельефа, так как наиболее распространенные параметры
шероховатости сверхгладких поверхностей не используют в полной мере данные АСМ.
При изучении диэлектрических материалов актуальной задачей является изучение
влияния статического заряда поверхности на получаемые АСМ - изображения.
Таким образом, развитие метода АСМ при исследовании
наноструктурированных поверхностей и пленочных покрытий является актуальной
задачей.
ГЛАВА 1. НАНОСТРУКТУРИРОВАННЫЕ
ПОВЕРХНОСТИ
.1 Наноструктурированные поверхности
Основными типами наноструктурированных
материалов по размерности структурных элементов, из которых они состоят,
являются нульмерные (0D), одномерные (1D), двумерные (2D) и трехмерные (3D)
наноматериалы. К нульмерным наноматериалам относятся нанокластерные материалы и
нанодисперсии, т. е. материалы, в которых наночастицы изолированы друг от
друга. Одномерные наноматериалы - нановолоконные (нанопрутковые) и
нанотубулярные материалы с длиной волокон (прутков, трубок) от 100 нм до
десятков микрометров. К двумерным наноматериалам относятся пленки (покрытия)
нанометровой толщины. Структурные элементы в 0D, 1D и 2D наноматериалах могут
быть распределены в жидкой или твердой макроскопической матрице или находиться
на подложке. К трехмерным наноматериалам относят порошки, волоконные,
многослойные и поликристаллические материалы, в которых 0D, 1D и 2D структурные
элементы плотно прилегают друг к другу, образуя между собой поверхности раздела
- интерфейсы. Важным типом трехмерного наноструктурированного материала
является компактный или консолидированный поликристалл с зернами нанометрового
размера, весь объем которого заполнен нанозернами, свободная поверхность зерен
практически отсутствует, и имеются только границы раздела зерен - интерфейсы.
Образование интерфейсов и «исчезновение» поверхности наночастиц (нанозерен) -
принципиальное отличие трехмерных компактных наноматериалов от
нанокристаллических порошков разной степени агломерации, состоящих из частиц
такого же размера, как и компактный наноструктурированный материал.
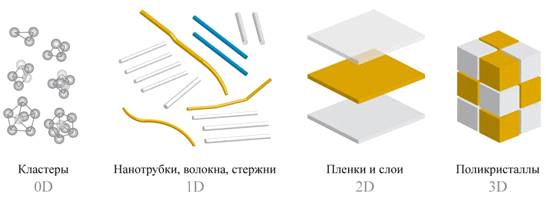
Рисунок 1 - Типы нанокристаллических материалов
по размерности структурных элементов: 0D (нульмерные) кластеры; 1D (одномерные)
нанотрубки, волокна и прутки; 2D (двумерные) пленки и слои; 3D (трехмерные)
поликристаллы
1.2 Классификация методов
исследования наноструктурированных поверхностей
Физические методы, наиболее часто используемые в
настоящее время для исследования наноструктур и поверхности твердого тела,
представлены в табл. 1. В основу данной таблицы положена группировка методов по
способу внешнего воздействия на исследуемый объект и по типу регистрируемого
ответного сигнала. Внизу таблицы дана расшифровка сокращенных названий
перечисленных в ней методов.
Разные методы позволяют получить различную
информацию об исследуемом объекте. Как правило, при анализе наноструктур и
поверхности твердого тела наиболее важной является информация об их атомной
структуре, элементном составе и электронных свойствах.
Таблица 1 - Основные физические методы
исследования наноструктур и поверхности, сгруппированные по типам воздействия
на исследуемый объект и регистрируемого сигнала, hv - электромагнитное
излучение, е-, N+- - пучки ускоренных электронов и ионов. Т-температура
|
Регистрируемый
сигнал
|
|
Воздействие
на ииследуемый объект
|
|
hν
|
e-
|
N±
|
Прочее
|
|
hν
|
РСА,
РЭС, РАС
|
РФЭС,
УФЭС, ФЭС, РОЭС
|
|
|
|
e-
|
РСМА,
ИФЭС
|
ОЭС,
ДМЭ, РЭМ
|
|
|
|
N±
|
|
ИНС
|
СРМИ,
СРБИ, ОРР, ВИМС
|
|
|
Т,
поле, прочее
|
|
СТМ,
СТС
|
ПИМ,
ТПД
|
АСМ,
МСМ
|
Так, метод ДМЭ (дифракция медленных электронов)
позволяет определить структуру кристаллической решетки образца, РЭМ (растровая
электронная микроскопия) используется для исследования морфологии объектов с
размерами >10 нм, а СТМ (сканирующая туннельная микроскопия) и АСМ
(атомно-силовая микроскопия) позволяют наблюдать отдельные атомы на поверхности
твердого тела. Кроме того, некоторые методы предъявляют определенные требования
к исследуемым образцам. Например, методы СТМ (сканирующая туннельная
микроскопия), СТС (сканирующая туннельная спектроскопия) применимы только для
проводящих образцов, МСМ (магнитно-силовая микроскопия) - для исследования
магнитных материалов, ПЭМ (просвечивающая электронная микроскопия) используется
для анализа тонких пленок.
1.3 Применение наноструктурированных
поверхностей
Практическое применение наноматериалы находят
уже сейчас во многих областях. Их электрические, оптические и механические
свойства указывают на значительные перспективы использования этих материалов в
ряде технических направлений. Прежде всего, это электроника. Они уже сейчас
используются при создании плёнок для литографии. Созданное с их помощью новое
поколение фоторезистов, приводит к уменьшению линейных размеров до 0.2
микрометров и использование одного и того же резиста для ультрафиолетового,
рентгеновского и электронно-лучевого процессов литографии. Фотолитография с
применением фуллеренов проводится в Санкт-Петербурге в ЗАО
"Авангард-Элионика".Одним из интересных примеров возможного
практического применения наноструктурных материалов являются высокопрочные
резьбовые изделия, широко используемые в авиа- и автомобилестроении. Элементы
резьбы являются концентратами напряжений, которые обычно лимитируют свойства
изделий.
В институте физики полупроводников РАН идёт
разработка новых технологий нанолитографии и безмасочного изготовления
наноприборов и атомно-размерных объектов, там же проводятся теоретические и
экспериментальные исследования многослойных наноструктур для создания элементов
микро- и фотоэлектроники.
Рассматриваются идеи создания элементов памяти
на основе нанотрубок. В институте микроэлектроники (ИМРАН) ведутся работы по
созданию памяти на самоорганизующихся углеродистых наноструктурах.
Одним из перспективных направлений в развитии
как наноэлектроники, так и наноприборостроения является исследование и создание
туннельного датчика. Подобные датчики обещают иметь весьма небольшие размеры,
кроме того, к их достоинствам относятся уникально высокая чувствительность и
широкий спектр применений.
ГЛАВА 2. ВЫСОКОВАКУУМНЫЙ СЗМ SOLVER
HV
.1 Назначение и методы измерений
Высоковакуумный сканирующий зондовый микроскоп
Solver HV (далее Solver HV) предназначен для количественных и качественных
измерении в условиях высокого вакуума. Solver HV позволяет с нанометровым
разрешением проводить исследование поверхностных характеристик и
приповерхностных физических параметров различных объектов, допускающих их
размещение в вакууме.
В зависимости от выбранной комплектации Solver
HV позволяет исследовать образцы в различных условиях:
магнитное поле до I к Гаусс;
нагрев до 1500С;
охлаждение до 50 К.
Наличие свободных фланцев позволяет
устанавливать дополнительное оборудование и использовать СЗМ SolverHV для
модификации в высоком вакууме поверхностных наноструктур с помощью ионного,
электронного или плазменного источников, направленных на исследуемую область
объекта.СЗМ Solver HV позволяет проводить измерения с использованием следующих
методов: Микроскопия (Сканирующая Туннельная Микроскопия (СТМ), Атомно-Силовая
Микроскопия (АСМ) (контактная + полуконтактная + бесконтактная),
Латерально-Силовая Микроскопия (ЛСМ), Метод Отображения Фазы, Метод Модуляции
Силы, Отображение Адгезионных Сил, Магнитно-Силовая Микроскопия (МСМ),
Электростатическая Силовая Микроскопия (ЭСМ), Сканирующая Емкостная Микроскопия
(СЕМ) (бесконтактная), Метод Зонда Кельвина (МЗК), Отображение Сопротивления
Растекания (ОСР). Спектроскопия АСМ (силовая, амплитудная, фазовая), СТМ (I(z),
I(V)), Отображение Работы Выхода (ОРВ), Отображение Локальной Плотности
Состояний (ОЛПС). Литография АСМ (Силовые (наногравировка и наночеканка) и
Токовые (постоянные и переменные)), СТМ. Наноманипуляция (Контактные, Силовые).
2.2 Технические характеристики
Таблица 2
|
Параметр
|
Значение
|
|
Размер
образца
|
до
10х10 мм
|
|
Позиционирование
образца: Диапазон перемещения Точность перемещения
|
3х3
mm шаговых двигателей в вакууме 5x5 mm вручную в воздухе - дополнительно 5
мкм
|
|
Диапазон
сканирования
|
50х50х2,5
мкм (±10%)
|
|
Способ
сканирования
|
Сканирование
зондом
|
|
Минимальный
шаг сканирования
|
0,006
нм
|
|
Вакуумная
система: Остаточное давление Время откачки
|
10-6
торр 30 мин до 10-5 торр
|
|
Система
термостатирования: Диапазон рабочих температур: нагрев охлаждение Время
установления температуры 110 К Точность поддержания температуры
|
до
1500С до 110 К (азотное) до 50 К (гелиевое) 30 мин ±0,10С
|
|
Магнитное
поле
|
±0,1
Т
|
|
СЗМ
контроллер: Напряжение питания Потребляемая мощность Вес
|
90-240
В, 50-60 Гц 80 Вт 16 кг
|
1/2”,
цветная 14”, цветной 5 мкм 0,1 от 47x до 578x от 2 до 0,49 мм
|
|
Система
виброизоляции Виброизолирующий стол: Активное демпфирование Пассивное демпфирование
Максимальная нагрузка Размер виброизолирующей столешницы Демпфирующая система
в рабочей камере
|
0,6
- 100 Гц > 100 Гц 300 кг 600х600 мм резонансная частота 1 Гц
|
2.3 Устройство СЗМ Solver HV
Основные узлы СЗМ Solver HV представлены на
рисунке 2.

Рисунок 2 - Основные узлы СЗМ Solver HV 1 -
вакуумная камера: 2 - шкаф электроники; 3 - турбомолекулярный насос; 4 -
виброизолирующий стол; 5 - видеомикроскоп: 6 - форвакуумный насос; 7 - система
охлаждения
Вакуумная камера 1 (Рис. 2) установлена на
виброизолирующем столе. Откачка воздуха из камеры производится форвакуумным 6 и
турбомолекулярным 3 насосами. Контроль давления в камере осуществляется
форвакуумным и высоковакуумным вакуумметрами.На Рис. 3 представлена блок-схема
Solver HV. В камере на внутренней демпфирующей системе подвешена измерительная
головка 2. Измерительная головка через переходные вакуумные разъёмы подключена
к СЗМ контроллеру 5, который в свою очередь подключен к управляющему
компьютеру.
Рисунок 3 - Блок-схема Solver HV: 1 - вакуумная
камера, 2 - измерительная головка, 3 - турбомолекулярный, 4 - форвакуумным
насос, 5 - СЗМ контроллер, 6 - компьютер, 7 - виброизолирующий стол
2.4 Основные функциональные системы Solver
HV
Основными функциональными системами Solver HV
являются:
вакуумная система;
виброизолирующая система;
измерительная система;
система управления;
система термостатнрования образца.
.4.1 Вакуумная система
Вакуумная система содержит:
вакуумную камеру;
форвакуумный насос; турбомолекулярный насос
(ТМИ) с контроллером;
вакуумметры с блоком питания;
вакуумную арматуру (клапаны, трубопровод,
уплотнения и т.д.).
Откачка воздуха из камеры производится с помощью
двух насосов: форвакуумный насос осуществляет предварительную откачку воздуха,
турбомолекулярный обеспечивает получение высокого вакуума и поддержание уровня
вакуума во время работы зондового микроскопа.
Конструктивные особенности и технические
характеристики насосов приведены в технической документации на эти устройства.
.4.2 Виброизолирующая система
Одним нз основных факторов, определяющих
пространственное разрешение любого зондового микроскопа, является качественная
виброизоляция. В Solver HV использована комбинация активной и пассивной
виброизоляции.
Камера установлена на столе активной
виброизоляции. Стол состоит из системы активной виброзащиты и пассивной
виброзащиты находящейся внутри столешницы.
Внутри вакуумной камеры имеется устройство
пассивной виброизоляции в виде подвеса на пружинах с магнитным успокоителем
(Рис. 4). Резонансная частота пружинного подвеса составляет величину около 1
Гц.

Рисунок 4 - Пассивная виброизоляция 1 -
пружинный подвес, 2 - арретир. 3 - магнитный успокоитель. 4 - опорное кольцо
2.5 СЗМ измерительная система
В состав СЗМ измерительной системы входят: -
сканирующая измерительная головка; - платформа-позиционер.
.5.1 Сканирующая измерительная
головка
Общий вид сканирующей измерительной головки
представлен на Рис. 5.
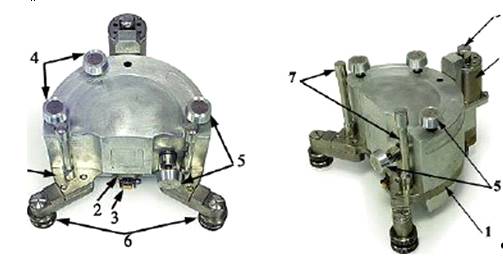
Рисунок 5 - Основные элементы сканирующей
измерительной головки 1 - основание: 2 - наконечник сканера: 3 - держатель
зонда; 4 - винты позиционирования лазера: 5 - винты позиционирования фотодиода;
6 - винтовые опоры: 7 -стойки: 8 - моторизованная опора с шаговым двигателем; 9
- микровинт
нанострутктурированный поверхность
исследование
Для наведения лазерного луча на кантилевер с
помощью винтов позиционирования лазера (см. поз. 4 на Рис. 5) подбирают такое
его положение, при котором лазерный луч будет попадать на кончик кантилевера.
Для установки и горизонтального выравнивания
измерительная головка снабжена регулируемыми по высоте винтовыми опорами (см.
поз. 6. 7 на Рис. 5). Две передние опоры с контргайками обеспечивают установку
измерительной головки по высоте над образцом. Моторизованная опора с шаговым
двигателем (см. поз. 8 на Рис. 5) используется для подвода зонда к образцу.
Сканирующая измерительная головка снабжена стопками (см. поз. 7 на Рис. 5),на
которые она устанавливается в перевернутом положении, например для замены
зонда.
.5.2 Автоматизированная
платформа-позиционер
Общим вид автоматизированной
платформы-позиционера представлен на Рис 6. Основными функциональными
элементами платформы являются:
позиционер:
термостатирусмый держатель образца:
криопансль:
магнитопроводы.
Позиционер образца (см. поз. 2 на Рис. 6 а)
обеспечивает автоматизированное перемещение образца в плоскости ХУ в диапазоне
4x4 мм. Посадочные гнезда (см.поз. 1 на Рис. 6 а) служат для установки
измерительной головки.
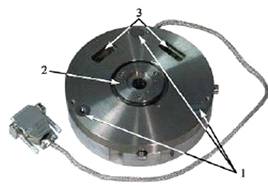
Рисунок 6 - Платформа-позиционер. а) 1 -
посадочные гнезда. 2 - позиционер образца, 3 - прорези для
креппениямагнитопроводов

Рисунок 7 - Платформа-позиционер. б) 4 - криопанель.
5 - держатель образца, отверстия для присоединения хладопровода. 7 -
магнитопроводы
Термостатируемый держатель образца (см. поз.5 на
Рис. 6) является частью системы термостатирования. В нем расположены
нагревательный и охлаждающий элементы, а также установлен терморезистор.
Криопанель 4 при помощи гибкогохладопровода
соединяется с емкостью, заполненной жидким азотом, установленной на один из
боковых фланцев камеры. Для охлаждения криопанели используется жидкий азот.
В платформе расположен электромагнит к которому
крепятся магнитопроводы(см. поз. 3, 7 на Рис. 6). Магнитопроводы служат для
создания в области образца магнитного поля, величиной до 1 кГаусс.направленного
в плоскости образца. Зазор между полюсными наконечниками магнитопроводов
составляет 12 мм. При необходимости (например, при исследовании образцов
больших размеров без приложения магнитного поля)магнитопроводы легко снимаются.
.6 Система управления
Система управления Solver HV включает:
СЗМ контроллер:
Компьютер с интерфейсной платой;
Контроллер позиционера;
Контроллер электромагнита:
Термоконтроллер.
Управление контроллерами осуществляется через
компьютер при помощи программы управления.
Контроллеры системы управления поставляются в
двух вариантах:
расположенными в специальной стойке - шкафу
электроники (см. Рис. 8);
в виде отдельных блоков.

Рисунок 8 - Шкаф электроники. 1 -
термоконтроллер: 2 - СЗМ контроллер: 3 - контроллер виброзащитного стола:4 -
контроллер генератора магнитного поля: 5 - компьютер; 6 - контроллер
турбомолекулярного насоса: 7 - блок питания вакуумметров
2.7 Система термостатирования
образца
Система термостатирования позволяет поддерживать
температуру образца с точностью ±O.l ºС.
при охлаждении до 110 К (азотное);
при нагреве до 150 С.
Устройство системы термостатирования схематично
показано на Рис. 9 а.

а) б)
Рисунок 9 - Система термостатирования 1 -
вакуумная камера. 2 - платформа-позиционер. 3 - основание держателя образца. 4
- предметный столик. 5 - магистраль охлаждения, б - нагревательный элемент. 7 -
терморезистор. 8 - сосуд Дьюара. 9 - транспортная линия. 10 - образец. 11 -
охлаждающим элемент. 12 - фланец. 13 - разъем для подключения терм резистора.
14 - разъем для подключения нагревательного элемента
Охлаждение (нагрев) и поддержание необходимой
температуры образца осуществляется при помощи термостабилизируемого держателя
обрата (см. поз. 3, 4 на Рис. 8) расположенного в платформе-позиционере. На
основании держателя образца закреплены нагревательный 6 и охлаждающий 11
элементы. Па фланце 12 расположены вход и выход магистрали охлаждения 5. а
также разъемы(см. поз. 13. 14 на Рис. 8.б) к которым подключены терморезистор и
нагревательный элемент.
В качестве хладагента системы термостатирования
используются жидкий азот или гелий. Хладагент подастся в охлаждающий элемент по
магистрали охлаждения 5 и соединенной с ее входом транспортной линии 9.
ГЛАВА 3. ИССЛЕДОВАНИЯ
НАНОСТРУКТУРИРОВАННОЙ ПОВЕРХНОСТИ НА АСМ SOLVERHV
.1 Подготовка к работе
Подготовка Solver 1IV к работе с использованием
атомно-силовой микроскопии в условиях вакуума состоит из следующих основных
процедур:
.Установка образца.
.Подготовка и настройка измерительной головки.
.Установка измерительной головки в вакуумную
камеру.
.Откачка рабочей камеры.
.Подготовка системы термостатирования образца.
Ниже приводится более подробное описание
перечисленных выше процедур.
.2 Установка образца
Для установки образца в вакуумную камеру
выполните следующие действия: 1. Приклейте образец на предметный столик
проводящим клеем.
. Пинцетом перенесите предметный столик в
камеру.
. Ввинтите предметный столик в основание
держателя образца.
Установка образца завершена.
.3 Подготовка измерительной головки
.3.1 Установка зондового датчика
Для установки зондового датчика или его замены
выполните следующие операции:
.Возьмите сканирующую измерительную головку,
переверните ее и поставьте в перевернутом положении на лабораторный стол.
. Поднимите прижимную пружину держателя зондового
датчика. Для этого поверните вниз поворотный рычажок в открытое состояние при
помощи пинцета. Рычажок имеет трапециевидную форму и расположен сбоку на
корпусе держателя зонда.
. Возьмите зондовый датчик из коробочки пинцетом
с учётом того, что рабочая грань чипа с кантнлеверамн при установке будет
обращена к Вам. Не переворачивайте чип, т. к. в коробочке зондовые датчики
лежат остриями вверх.
.Перенесите зондовый датчик на полочку держателя
и поместите его слева от рабочего места. Рабочее место находится в углу полочки
под прижимом держателя.
. Передвиньте зондовый датчик на рабочее место
пинцетом.
. После установки зондового датчика на рабочее
место опустите прижимную пружину держателя для его фиксации. Для этого при
помощи пинцета поверните рычажок в фиксирующее положение.
.3.2 Установка измерительной головки
Для установки измерительной головки в вакуумную
камеру выполните следующие действия:
. Установите измерительную головку в посадочные
гнезда на платформе- позиционере.

Рисунок 10 - Установка и подключение
измерительном голоски: 1- подключение измерительной головки, 2- подключение
платформы-позиционера
4. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
РЕЖИМОВ РАБОТЫ АСМ SOLVERHV ДЛЯ ИССЛЕДОВАНИЯ НАНОСТРУКТУРИРОВАННОЙ ПОВЕРХНОСТИ
С помощью АСМ SOLVERHV было проведено
исследование калибровочной решетки TGZ2. Ниже представлены изображения,
полученные при сканировании образца в различных видах в контактном режиме.
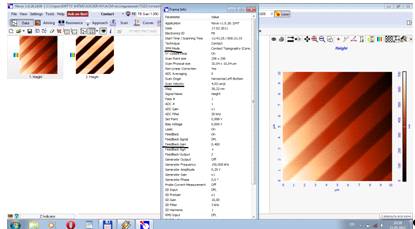
Рис. 11
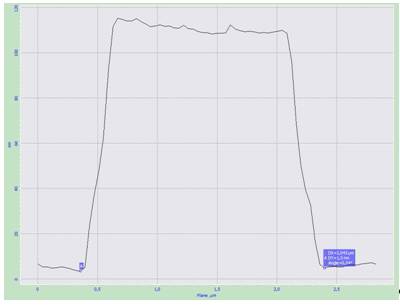
Рис. 12 - Профиль калибровочной решетки TGZ2
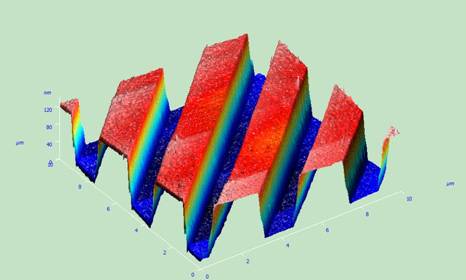
Рис. 13 - 3D изображениеTGZ2

Рис. 14 - 2D изображениеTGZ2
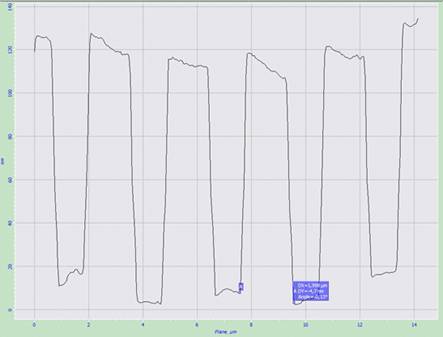
Рис. 15 - Профиль калибровочной решетки TGZ2
Далее получены изображения той же калибровочной
решетки TGZ2 в контактном режиме при более высокой скорости 2.08 Hz FB Gain
0.100.

Рис. 16 - Профиль калибровочной решетки
TGZ2(2.08 Hz FB Gain 0.100)
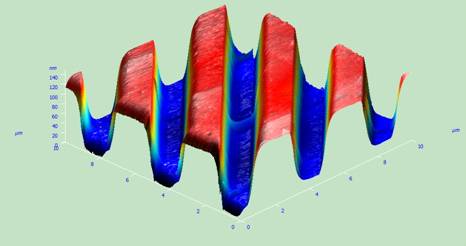
Рис. 17 - 3D изображение калибровочной решетки
TGZ2(2.08 Hz FB Gain 0.100)
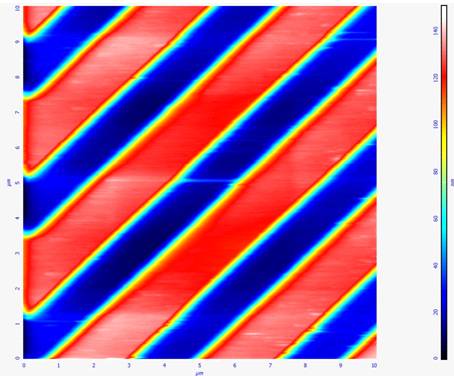
Рис. 18 - 2D изображение калибровочной решетки
TGZ2(2.08 Hz FB Gain 0.100)
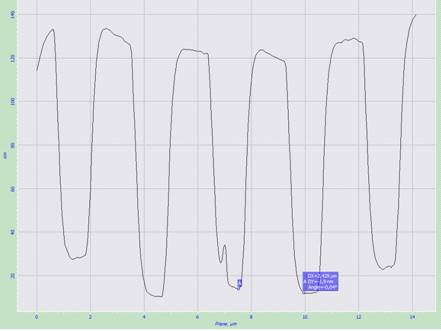
Рис. 19 - Профиль калибровочной решетки
TGZ2(2.08 Hz FB Gain 0.100)
При сравнении исследований, было выявлено, что
режим работы, при более низкой скорости сканирования давал более чёткие
изображения решетки, так как зонд успевал охватить все неровности и
шероховатости наноструктурной поверхности.
ЗАКЛЮЧЕНИЕ
В ходе курсовой работы были изучены принципы
сканирующей зондовой микроскопии, получены навыки работы на АСМ SOLVER HV.
Задачами курсовой работы являлись:
экспериментальное определение режимов работы АСМ SOLVER HV для исследования
наноструктурированной поверхности, также выявлен режим работы, дающий наилучший
результат исследования.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Быков
А.В. Физические методы исследования.
. Д.
Брандон, У. Каплан. Микроструктура материалов. Методы исследования и контроля.
. Неволин
В. Зондовые нанотехнологии в электронике.