Синтез системы автоматического регулирования массы
1.
Реферат
В данной работе производится расчет синтеза САУ
температуры бумажного полотна, т.е. выбор оптимальных настроек регулятора, и
соответственно их оценка. Для это в соответствии с заданием составляется
функциональная и алгоритмическая структуры, по которым определяются свойства
системы по каналам управления и возмущения по их математическим моделям в виде
передаточной функции, рассчитывается период дискретности. Составляется
замкнутая модель системы, и рассчитывается. Так же по ней рассчитывается и строится
область устойчивости, из которой выбираются коэффициенты. Дальше по выбранным
настройкам строятся графики переходных процессов, их оценивают и выбирают
оптимальные настройки. Дальше рассчитывают и стоят график переходного процесса
по возмущающему воздействию, по которому можно определить справляется ли
система при выбранных настройках с возмущениями.
2.
Описание технологического процесса и принцип работы системы регулирования
Цель создания автоматической системы - достичь
того, чтобы значение массы 1кв. метра бумажного полотна было равно заданному.
При этом требуется, чтобы точность регулирования, т.е. возможное отклонение,
находилось в определенных пределах. Поэтому, для синтеза системы выбран принцип
управления по отклонению регулируемой величины от задания.
Принципиальная схема АСР массы 1 м2.
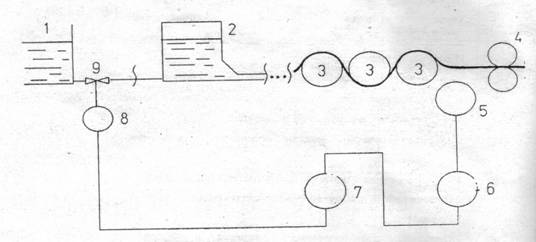
Обозначения в схеме:
бак массы
напорный ящик БДМ
сушильные группы
каландр
датчик массы 1 м2
преобразователь
регулятор
электродвигатель - исполнительный механизм
регулирующий орган - клапан
Текущее значение массы 1 м2 полотна фиксируется
датчиком. Через преобразователь на регулятор подается электрический сигнал. В
регуляторе происходит сравнение поступившего сигнала с заданным значением. В
результате сравнения полученное отклонение определяет величину управляющего
воздействия, которое должно нейтрализовать отклонение. В зависимости от
величины и знака управляющего воздействия, управляющий блок формирует
воздействие на электродвигатель (исполнительный механизм).
3.
Составление и описание функциональной структуры САР
Функциональная структура - это структура,
элементами которой являются функции, а связи отражают порядок их реализации в
системе. Функциональные схемы изображаются в виде прямоугольников, соединенных
линиями со стрелками, указывающими направление сигналов. Каждый отдельный
прямоугольник на функциональных схемах отображает элемент, играющий конкретную
роль в системе.
Рассмотренная функциональная структура приведена
:

Принцип действия состоит в следующем:
Если масса 1 м2 равна заданной, то ошибка
регулирования равна нулю и на вход регулятора сигнал не поступает. Система
находится в равновесии. При отклонении массы 1 м2 от заданной появляется ошибка
регулирования (как разность заданного воздействия и значения сигнала с датчика)
и, следовательно, равновесие системы нарушается. На вход регулятора поступает
сигнал, величина и знак, которого зависят от рассогласования. На регуляторе
формируется управляющее воздействие, оно подается на ИМ, которое изменяет
степень открытия клапана, тем самым, регулируя массу 1 м2.
4.
Исследование свойств объекта регулирования по каналам управления и возмущения
по его математической модели в виде передаточной функции
система регулирование управление
Рассмотрим объект регулирования в виде «черного
ящика». Входными воздействиями объекта будут: управляющее и возмущающее
воздействия, а выходной переменной - управляемая переменная объекта.
Объект регулирования представляет собой канал
“изменения расхода массы - изменения 1 м2 бумажного полотна”. Пусть
математическая модель объекта имеет вид:

где ко - коэффициент передачи объекта;
То - постоянная времени объекта;
τ о- запаздывание информации
по рассматриваемому каналу.
Дифференциальное уравнение, соответствующее
модели вида (1) будет представлено выражением:

где y(t) - изменение расхода массы, x(t) -
изменение массы 1 м2 бумажного полотна.
Численные значения параметров модели приводятся
в задании на курсовое проектирование, в рассматриваемом примере  ,
To=85 с, τo=20 с.
,
To=85 с, τo=20 с.
Тогда  и
соответствующее дифференциальное уравнение представлено выражением:
и
соответствующее дифференциальное уравнение представлено выражением:  .
.
Найдем статическую модель объекта по каналу
управления.
Статическая модель определяет соотношения между
входной и выходной величиной элемента системы регулирования в установившемся
режиме. Обычно эта зависимость выражается алгебраическим уравнением, которое
получается из дифференциального, приравниванием к нулю всех производных.
Проделав эти операции, получим:
Для рассматриваемого примера по каналу
управления статическая модель ОР будет описываться выражением
 .
.
Статическая характеристика изображена на рис.1.
Так как объект является линейным звеном, то его статическая характеристика
изображается в виде прямой линии с тангенсом угла наклона равным К0 =150 в
диапазоне изменения входного и выходного сигналов.
Найдем переходную и весовую функции объекта по
каналу управления.
Переходная функция h(t) определяется как переходный
процесс на выходе звена при подачи на него вход единичного ступенчатого
воздействия 1[t] при нулевых начальных условиях. Это воздействие имеет ту же
размерность, что и физическая величина на выходе звена. Поэтому, что бы
получить переходную функцию звена, нужно изменить его входной сигнала на одну
единицу.
Как известно из теоретической части курса,
переходная функция апериодического звена 1-го порядка с запаздыванием
определяется выражением:
размерность h(t) - размерность регулируемой
величины.
Время окончания переходного процесса бесконечно
большое. Поэтому для расчета переходной функции необходимо его приблизительно
оценить.
Примерное время окончания переходного процесса
можно найти из условия попадания кривой в 5-%-ную зону допустимой статической
ошибки для апериодического звена 1 порядка, тогда  .
Шаг расчета должен быть удобным, чтобы с одной стороны число точек было не
слишком большим и в тоже время по графику было удобно проследить характер
изменения выходного сигнала, особенно при наличии запаздывания.
.
Шаг расчета должен быть удобным, чтобы с одной стороны число точек было не
слишком большим и в тоже время по графику было удобно проследить характер
изменения выходного сигнала, особенно при наличии запаздывания.
Для рассматриваемого примера
 .
.
Время окончания переходного процесса  .
Шаг расчета выбираем равным величине запаздывания Δt=20
c.
.
Шаг расчета выбираем равным величине запаздывания Δt=20
c.
Весовая функция w(t) представляет собой
переходный процесс на выходе звена на единичную импульсную функцию d
[t]
при нулевых начальных условиях. Единичная импульсная функция является
производной от единичной ступенчатой функции  ,
поэтому размерность весовой функции равна размерности физической величины на
выходе звена, деленной на время. Весовая функция w(t) определяется
дифференцированием переходной функции 1-го порядка со звеном запаздывания.
,
поэтому размерность весовой функции равна размерности физической величины на
выходе звена, деленной на время. Весовая функция w(t) определяется
дифференцированием переходной функции 1-го порядка со звеном запаздывания.
Получаем:
 ,(4)
,(4)
ли для нашего примера

|
t
|
w(t)
|
t
|
w(t)
|
|
0
|
0
|
240
|
0,106098
|
|
20
|
1,411765
|
260
|
0,083853
|
|
40
|
1,115772
|
280
|
0,066272
|
|
60
|
0,881837
|
300
|
0,052378
|
|
80
|
0,69695
|
320
|
0,041396
|
|
100
|
0,550826
|
|
|
|
120
|
0,435339
|
|
|
|
140
|
0,344065
|
|
|
|
160
|
0,271928
|
|
|
|
180
|
0,214915
|
|
|
|
200
|
0,169856
|
|
|
|
220
|
0,134243
|
|
|
Выражения для частотных характеристик объекта по
каналу управления могут быть получены из выражения частотной передаточной
функции:

тогда АЧХ объекта определяется из выражения:
 ,
,
ФЧХ объекта определяется из выражения:

Частота wпр , определяющая
полосу частот пропускания объекта, находится из условия:  при
ω=0.
при
ω=0.
АЧХ покажет, как пропустит объект сигналы
входного воздействия различной частоты. Ордината графика АЧХ имеет размерность
коэффициента передачи по рассматриваемому каналу. ФЧХ покажет фазовые сдвиги,
вносимые звеном в выходной сигнал на различных частотах входного воздействия.
Подставив исходные данные получим следующие
выражения:


 .
.
Частотную характеристику построена в диапазоне
частот от 0 до 15wпр.
|
частота
w
|
ачх
|
фчх
|
частота
w
|
ачх
|
фчх
|
|
0
|
120
|
0
|
0,2574
|
5,478991
|
-2,90406
|
|
0,0117
|
85,08648
|
-1,0125
|
0,2691
|
5,241239
|
-2,91419
|
|
0,0234
|
53,90267
|
-1,54266
|
0,2808
|
5,023245
|
-2,9235
|
|
0,0351
|
38,13605
|
-1,85945
|
0,2925
|
4,822647
|
-2,93209
|
|
0,0468
|
29,25569
|
-2,07687
|
0,3042
|
4,637443
|
-2,94003
|
|
0,0585
|
23,65904
|
-2,23592
|
0,3159
|
4,465928
|
-2,94739
|
|
0,0702
|
19,83401
|
-2,35665
|
0,3276
|
4,30664
|
-2,95424
|
|
0,0819
|
17,06252
|
-2,45082
|
0,3393
|
4,158317
|
-2,96062
|
|
0,0936
|
14,96521
|
-2,52593
|
0,351
|
4,019864
|
-2,96659
|
|
0,1053
|
13,32417
|
-2,58702
|
0,3627
|
3,89033
|
-2,97218
|
|
0,117
|
12,00582
|
-2,63752
|
0,3744
|
3,768879
|
-2,97742
|
|
0,1287
|
10,92388
|
-2,67988
|
0,3861
|
3,654778
|
-2,98235
|
|
0,1404
|
10,02019
|
-2,71587
|
0,3978
|
3,54738
|
-2,98699
|
|
0,1521
|
9,254178
|
-2,7468
|
|
|
|
|
0,1638
|
8,596687
|
-2,77363
|
|
|
|
|
0,1755
|
8,02623
|
-2,79711
|
|
|
|
|
0,1872
|
7,526629
|
-2,81783
|
|
|
|
|
0,1989
|
7,085478
|
-2,83623
|
|
|
|
|
0,2106
|
6,693101
|
-2,85269
|
|
|
|
|
0,2223
|
6,341843
|
-2,86748
|
|
|
|
|
0,234
|
6,025572
|
-2,88085
|
|
|
|
|
0,2457
|
5,739313
|
-2,89299
|
|
|
|
АФЧХ можно построить по выражению частотных
характеристик, если его записать в виде:

 =
=

 =
=

|
АФЧХ
|
u(w)
вещ. часть
|
v(w)мнимая
ч.
|
АФЧХ
|
u(w)
вещ. часть
|
v(w)мнимая
ч.
|
|
0
|
120
|
0
|
0,187
|
3,867414085
|
6,457031564
|
|
0,0117
|
44,77468133
|
-72,35286318
|
0,199
|
4,969590423
|
5,050462325
|
|
0,0234
|
-0,115495648
|
-53,90254846
|
0,211
|
5,684254963
|
3,533672908
|
|
0,0351
|
-14,09553662
|
-35,43549636
|
0,222
|
6,021372468
|
1,99049052
|
|
0,0468
|
-18,61602801
|
-22,56853989
|
0,234
|
6,005016437
|
0,4972858
|
|
0,0585
|
-19,53659495
|
-13,34435336
|
0,246
|
5,67159675
|
-0,879032809
|
|
0,0702
|
-18,74547313
|
-6,480367437
|
0,257
|
5,067700314
|
-2,082729204
|
|
0,0819
|
-17,01395919
|
-1,286445065
|
0,269
|
4,247628188
|
-3,070544415
|
|
0,0936
|
-14,73358301
|
2,62277597
|
0,281
|
3,270730609
|
-3,812520639
|
|
0,1053
|
-12,14465429
|
5,480955791
|
0,293
|
2,198651924
|
-4,29230132
|
|
0,117
|
-9,417967907
|
7,445915663
|
0,304
|
1,092601304
|
-4,506894518
|
|
0,1287
|
-6,686830683
|
8,63813549
|
0,316
|
0,010762748
|
-4,465915157
|
|
0,1404
|
-4,060124769
|
9,160761119
|
|
|
|
|
0,1521
|
-1,627513741
|
9,109939761
|
|
|
|
|
0,1638
|
0,538718109
|
8,579790909
|
|
|
|
|
0,1755
|
2,383198387
|
7,664249996
|
|
|
|

Пусть математическая модель объекта по каналу
возмущения имеет вид:

Параметры модели:
 - коэффициент
передачи объекта,
- коэффициент
передачи объекта,
 - постоянная
времени ,
- постоянная
времени ,
 - запаздывание .
- запаздывание .
Дифференциальное уравнение, соответствующее
модели вида будет представлено выражением:
Численные значения параметров модели приводятся
в задании на курсовое проектирование:
 ,
=70(c)
, =20(c).
,
=70(c)
, =20(c).
Тогда математическая модель примет следующий
вид:
А дифференциальное уравнение:
Найдем статическую модель объекта по каналу
возмущения.
Статическая модель определяет соотношения между
входной и выходной величиной элемента системы регулирования в установившемся
режиме. Обычно эта зависимость выражается алгебраическим уравнением, которое
получается из дифференциального, приравниванием к нулю всех производных.
Проделав эти операции, получим:
где ∆y∞1 и ∆x∞ -
значения входного и выходного сигналов.
Для рассматриваемого примера по каналу
управления статическая модель ОР будет описываться выражением .
Статическая характеристика изображена на рисунке ниже. Так как объект является
линейным звеном, то его статическая характеристика изображается в виде прямой
линии с тангенсом угла наклона равным
.
Статическая характеристика изображена на рисунке ниже. Так как объект является
линейным звеном, то его статическая характеристика изображается в виде прямой
линии с тангенсом угла наклона равным  =1,1
в диапазоне изменения входного и выходного сигналов.
=1,1
в диапазоне изменения входного и выходного сигналов.
Найдем переходную и весовую функции объекта по
каналу возмущения.
Как известно из теоретической части курса,
переходная функция апериодического звена 1-го порядка с запаздыванием
определяется выражением:
 ,
,
Для рассматриваемого примера
 .
.
Весовая функция определяется выражением:
 ,
,
или для нашего примера
|
t
|
0
|
20
|
40
|
60
|
80
|
100
|
120
|
160
|
180
|
200
|
220
|
240
|
260
|
280
|
|
w(t)
|
0
|
0,0157
|
0,0118
|
0,0089
|
0,066
|
0,0050
|
0,004
|
0,0028
|
0,0021
|
0,0016
|
0,0012
|
0,0009
|
0,0006
|
0,0005
|
0,0003
|

Выражения для частотных характеристик объекта по
каналу возмущения могут быть получены из выражения частотной передаточной
функции:

АЧХ:
 ,
,
ФЧХ:
 .
.
Частотную характеристику построена в диапазоне
частот от 0 до 15wпр.
АФЧХ можно построить по выражению частотных
характеристик, если его записать в виде:
,
где
 =
=
 =
=

Результаты расчета и график изменения АФЧХ
приведены ниже.
|
w
|
u(w)
|
v(w)
|
w
|
u(w)
|
v(w)
|
|
0
|
1,1
|
0
|
0,126
|
-0,08305
|
-0,09197
|
|
0,014
|
0,387293
|
0,683539
|
0,14
|
-0,04789
|
-0,10087
|
|
0,028
|
-0,04405
|
0,497973
|
0,154
|
-0,01559
|
-0,1004
|
|
0,042
|
-0,17358
|
0,308773
|
0,168
|
0,012413
|
-0,09237
|
|
0,056
|
-0,20786
|
0,175284
|
0,182
|
0,035105
|
-0,07859
|
|
0,07
|
-0,2049
|
0,079973
|
|
|
|
|
0,084
|
-0,1841
|
0,010921
|
|
|
|
|
0,098
|
-0,15396
|
-0,0384
|
|
|
|
|
0,112
|
-0,11921
|
-0,07184
|
|
|
|
5.
Расчет периода дискретности в соответствии с требованиями к точности измерения
Пусть изменения массы, наблюдаемые в процессе
эксплуатации объекта, описываются корреляционной функцией вида:
 ,
,
где
 ,
,
 .
.
Ошибка ступенчатой экстраполяции этого сигнала
при разном периоде опроса может быть рассчитана по формуле:

где  -
дисперсия ошибки экстраполяции;(0) - значение корреляционной функции при
значении периода дискретности τ =0;
-
дисперсия ошибки экстраполяции;(0) - значение корреляционной функции при
значении периода дискретности τ =0;
R(τ) - значение
корреляционной функции при разных значениях периода опроса τ;
τ - значения периода
опроса сигнала датчиком.
Считаем, что допустимая ошибка экстраполяции
сигнала датчика должна быть не более ошибки измерения массы 1 м2. Если,
например, согласно заданию σдоп≤0,5
г/м2, то период опроса может быть взят равным 20сек. А так как технические
средства в данном случае не накладывают никаких дополнительных ограничений, то
период управления принимаем равным периоду опроса, т.е. τ
=20с.
|
Rti
значения К
|
Ti
переод опроса
|
sigma^2
дисперсия ошибки (г/m^2)^2
|
sigma
среднеквадратичная ошибка г/m^2
|
|
0,25
|
0
|
|
|
|
0,137202909
|
20
|
0,225594182
|
0,474967559
|
|
0,185204555
|
10
|
0,12959089
|
0,359987347
|
|
0,204682688
|
6,666666667
|
0,090634623
|
0,301055848
|
|
0,215176994
|
5
|
0,069646012
|
0,263905308
|
6.
Составление и описание алгоритмической структуры системы управления, получение
моделей замкнутой системы по каналам управления
Алгоритмическая структура - это структура,
элементами которой являются алгоритмы преобразования информации, а связи между
элементами отражают порядок реализации алгоритмов в системе. Алгоритм преобразования
информации звеньями можно описывать их передаточными функциями. Объект
управления можно характеризовать обычными передаточными функциями, которые в
соответствии с заданием, обозначаются через 
Программы первичной обработки совместно с
устройствами ввода информации обеспечивают периодический опрос выходного
сигнала измерительной системы и преобразование его в значение технологического
параметра. Если пренебречь запаздыванием в работе измерительного устройства, то
это преобразование алгоритмически эквивалентно импульсному элементу.
Дискретной передаточной функцией можно описывать
и алгоритм расчета управляющего воздействия, реализуемый с помощью программы
управления процессом  .
.
Достаточно часто встречающийся случай, когда
преобразование расчетной величины управляющего воздействия в командный сигнал,
поступающий на исполнительный механизм, и работа самого исполнительного механизма,
осуществляющего перемещение регулирующего органа, эквивалентно преобразованию,
выполняемому фиксатором нулевого порядка:
 ,
,
По приведенной алгоритмической структуре
получаем выражение для передаточной функции замкнутой системы по каналу
управления.
В общем виде выражение можно записать как:

7.
Построение области устойчивости замкнутой системы
Для построения границ области устойчивости для
дискретных систем, порядок характеристического полинома которых выше третьего,
рационально использовать критерий Михайлова. Для того, чтобы дискретная система
была устойчива, необходимо и достаточно, чтобы при возрастании относительной
частоты  от
0 до π
годограф
характеристического уравнения системы, начинаясь с положительной части
действительной оси, последовательно обходил 2n квадрантов против часовой
стрелки, нигде не обращаясь в нуль, где n- порядок характеристического
уравнения системы.
от
0 до π
годограф
характеристического уравнения системы, начинаясь с положительной части
действительной оси, последовательно обходил 2n квадрантов против часовой
стрелки, нигде не обращаясь в нуль, где n- порядок характеристического
уравнения системы.
Если характеристический полином замкнутой
системы имеет вид:

то апериодическая граница устойчивости системы
получается из уравнения  при z=1, что
соответствует
при z=1, что
соответствует  .
.
Условие нахождения системы на колебательной
границе устойчивости заключается в прохождении кривой Михайлова через начало
координат. Тогда уравнение колебательной границы устойчивости получаем из (13)
заменой переменной z с помощью формулы Эйлера  и
приравниванием к нулю вещественной и мнимой частей выражения. Для относительной
частоты
и
приравниванием к нулю вещественной и мнимой частей выражения. Для относительной
частоты  выражение
принимает вид:
выражение
принимает вид:  , а для старших
степеней переменной z -
, а для старших
степеней переменной z -  .
.
Например, характеристический полином, найденный
из выражения для передаточной функции замкнутой системы, имеет вид:
 .
.
Тогда выражения для границ области устойчивости
примут вид:
для апериодической границы
 или
или
 ;
;
для колебательной границы

Отсюда


|
относительная
частота
|
к1
|
к2
|
|
0,01
|
-0,00833
|
0,008332
|
|
0,157
|
-0,0075
|
0,008013
|
|
0,304
|
-0,00529
|
0,007139
|
|
0,451
|
-0,00198
|
0,005729
|
|
0,598
|
0,002029
|
0,003814
|
|
0,745
|
0,006224
|
0,001435
|
|
0,892
|
0,010038
|
-0,00136
|
|
1,039
|
0,0129
|
-0,0045
|
|
1,186
|
0,014289
|
-0,00793
|
|
1,333
|
0,013786
|
-0,01157
|
|
1,48
|
0,011116
|
-0,01535
|
|
1,627
|
0,006179
|
-0,01917
|
|
1,774
|
-0,00094
|
-0,02296
|
|
1,921
|
-0,00995
|
-0,02664
|
|
2,068
|
-0,02041
|
-0,03013
|
|
2,215
|
-0,03172
|
-0,03335
|
|
2,362
|
-0,0432
|
-0,03623
|
|
2,509
|
-0,05411
|
-0,03871
|
|
2,656
|
-0,06373
|
-0,04074
|
|
2,803
|
-0,07141
|
-0,04227
|
|
2,95
|
-0,07663
|
-0,04327
|
|
3,097
|
-0,07903
|
-0,04372
|
|
3,14
|
-0,07917
|
-0,04375
|
Изменяя  от
0 до π,
получим
область устойчивости в плоскости настроек регулятора k1 и k2 (рис.10). Из
рисунка видно, что начальное значение относительной частоты отлично от 0. Это
связано с тем, что при вычислении параметра k1 для рассматриваемого примера в
знаменателе содержится
от
0 до π,
получим
область устойчивости в плоскости настроек регулятора k1 и k2 (рис.10). Из
рисунка видно, что начальное значение относительной частоты отлично от 0. Это
связано с тем, что при вычислении параметра k1 для рассматриваемого примера в
знаменателе содержится  и при
и при  появляется
ошибка «Деление на 0».
появляется
ошибка «Деление на 0».

8.
Выбор настроек регулятора в соответствии с требованиями к качеству САР
Оценка качества производится традиционно по
графику переходного процесса. В этом случае определяют следующие показатели
качества:
точность характеризуется статической и
динамической ошибками;


быстродействие - временем чистого запаздывания и
временем регулирования;
запас устойчивости - перерегулированием,
затуханием и числом колебаний.

Выбранные настройки регулятора из области
устойчивости:
|
K1
|
K2
|
|
0,006
|
0,0015
|
|
0,008
|
0,003
|
|
0,005
|
0,0015
|
9.
Расчет переходного процесса с выбранными настройками регулятора при изменении
задающего и возмущающего воздействий
Расчет переходного процесса системы по каналу
управления.
Рассчитаем переходный процесс с выбранными
настройками регулятора при изменении задающего воздействия. Для этого запишем
передаточную функцию замкнутой системы согласно определению как отношение
изображения выходного сигнала (регулируемого параметра) к изображению входного
сигнала (задающего воздействия) при нулевых начальных условиях.
Тогда уравнение в изображениях примет вид:
 .
.
С использованием обратного преобразования
Лапласа можно перейти к разностному уравнению:

Рассчитаем переходный процесс с выбранными
настройками регулятора при изменении задающего воздействия  в
% концентрации.
в
% концентрации.
Передаточная функция замкнутой системы по
задающему воздействию определяется выражением (13), которое для рассматриваемого
примера можно записать в виде:
 ,
,
отсюда уравнение в изображениях примет вид:

Перейдем к разностному уравнению

Зная, что при нулевых начальных условиях  для
всех
для
всех  и
задающее воздействие
и
задающее воздействие  принимает следующие
значения.
принимает следующие
значения.
Выбираем коэффициенты K1 , K2:

Оценку качества сведем в таблицу
|
|
K1=0,006
K2=0,0015
|
K1=0,008K2=0,003
|
K1=0,005
K2=0,0015
|
|
Перерегулирование,
σ
|
35%
|
44%
|
17%
|
|
Время
регулирования, tрег мин
|
|
|
|
|
Затухание
ψ
|
90%
|
100%
|
100%
|
|
Статическая
ошибка
|
0
|
0
|
0
|
|
Данамическая
ошибка ْ С
|
|
|
|
|
Число
колебаний
|
1
|
1
|
0
|
Выбираем настройки регулятора K1=0,005 ;
K2=0,0015.
Подставляя выбранные значения настроек
регулятора  , уравнение можно
записать
, уравнение можно
записать

|
n
|
∆Cзад[Tn-3]
|
∆Cзад[Tn-2]
|
∆M[Tn-3]
|
∆M[Tn-2]
|
∆M[Tn-1]
|
∆M[Tn]
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
|
2
|
0
|
-3
|
0
|
0
|
0
|
-1,152
|
|
3
|
-3
|
-3
|
0
|
0
|
-1,152
|
-2,37312
|
|
4
|
-3
|
-3
|
0
|
-1,152
|
-2,37312
|
-3,17676
|
|
5
|
-3
|
-3
|
-1,152
|
-2,37312
|
-3,17676
|
-3,4939
|
|
6
|
-3
|
-3
|
-2,37312
|
-3,17676
|
-3,4939
|
-3,46798
|
|
7
|
-3
|
-3
|
-3,17676
|
-3,4939
|
-3,46798
|
-3,28935
|
-3
|
-3
|
-3,4939
|
-3,46798
|
-3,28935
|
-3,10224
|
|
9
|
-3
|
-3
|
-3,46798
|
-3,28935
|
-3,10224
|
-2,97768
|
|
10
|
-3
|
-3
|
-3,28935
|
-3,10224
|
-2,97768
|
-2,92691
|
|
11
|
-3
|
-3
|
-3,10224
|
-2,97768
|
-2,92691
|
-2,92898
|
|
12
|
-3
|
-3
|
-2,97768
|
-2,92691
|
-2,92898
|
-2,95522
|
|
13
|
-3
|
-3
|
-2,92691
|
-2,92898
|
-2,95522
|
-2,98352
|
|
14
|
-3
|
-3
|
-2,92898
|
-2,95522
|
-2,98352
|
-3,00272
|
|
15
|
-3
|
-3
|
-2,95522
|
-2,98352
|
-3,00272
|
-3,0108
|
|
16
|
-3
|
-3
|
-2,98352
|
-3,00272
|
-3,0108
|
-3,01077
|
|
17
|
-3
|
-3
|
-3,00272
|
-3,0108
|
-3,01077
|
-3,00692
|
|
18
|
-3
|
-3
|
-3,0108
|
-3,01077
|
-3,00692
|
-3,00265
|
|
19
|
-3
|
-3
|
-3,01077
|
-3,00692
|
-3,00265
|
-2,99969
|
|
20
|
-3
|
-3
|
-3,00692
|
-3,00265
|
-2,99969
|
-2,99841
|
|
21
|
-3
|
-3
|
-3,00265
|
-2,99969
|
-2,99841
|
-2,99837
|
|
22
|
-3
|
-3
|
-2,99969
|
-2,99841
|
-2,99837
|
-2,99893
|
|
23
|
-3
|
-3
|
-2,99841
|
-2,99837
|
-2,99893
|
-2,99958
|
|
24
|
-3
|
-3
|
-2,99837
|
-2,99893
|
-2,99958
|
-3,00003
|
|
25
|
-3
|
-3
|
-2,99893
|
-2,99958
|
-3,00003
|
-3,00023
|
|
26
|
-3
|
-3
|
-2,99958
|
-3,00003
|
-3,00023
|
-3,00025
|
|
27
|
-3
|
-3
|
-3,00003
|
-3,00023
|
-3,00025
|
-3,00016
|
|
28
|
-3
|
-3
|
-3,00023
|
-3,00025
|
-3,00016
|
-3,00007
|
|
29
|
-3
|
-3
|
-3,00025
|
-3,00016
|
-3,00007
|
-3
|
|
30
|
-3
|
-3
|
-3,00016
|
-3,00007
|
-3
|
-2,99997
|
|
31
|
-3
|
-3
|
-3,00007
|
-3
|
-2,99997
|
-2,99996
|
|
32
|
-3
|
-3
|
-3
|
-2,99997
|
-2,99996
|
-2,99997
|
|
33
|
-3
|
-3
|
-2,99997
|
-2,99996
|
-2,99997
|
-2,99999
|
|
34
|
-3
|
-3
|
-2,99996
|
-2,99997
|
-2,99999
|
-3
|
|
35
|
-3
|
-3
|
-2,99997
|
-2,99999
|
-3
|
-3,00001
|
Расчет переходного процесса при изменении
возмущающего воздействия.
Рассчитаем переходный процесс в исследуемой
системе при изменении возмущающего воздействия  .
.
Для расчета воспользуемся методом структурного
моделирования, который заключается в том, что исследуемая система описывается
системой разностных уравнений соответствующих звеньев.
Математическую модель рассматриваемой системы
управления можно представить через систему следующих математических моделей
элементов:
модель приведенной непрерывной части
(совокупность модели фиксатора и модели объекта регулирования по каналу
управления);
модели сумматоров;
модель регулятора;
модель объекта регулирования по каналу
возмущения.
Составим систему из 5 разностных уравнений,
которые принимают вид:
Возмущающее воздействие согласно заданию
задается выражением
 .
.
Математическая модель объекта регулирования по
каналу передачи возмущения соответствует математической модели апериодического
звена 1 порядка с запаздыванием. Реакция на ступенчатую функцию с амплитудой  является
типовой и описывается зависимостью:
является
типовой и описывается зависимостью:
Перейдем от непрерывной функции к решетчатой
путем формальной замены t на nT. Тогда получаем выражение
 ,
,
так как известно, что  ,
то
,
то


|
n
|
M1(n)
|
M1(n-1)
|
U(n-2)
|
U(n)
|
U(n-1)
|
E(n-1)
|
E(n)
|
M(n)
|
M2(n)
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
2
|
0
|
0
|
0
|
-0,0034
|
0
|
0
|
-0,6834
|
0,6834
|
0,6834
|
|
3
|
0
|
0
|
0
|
-0,0084
|
-0,003
|
-0,6834
|
-1,197
|
1,197
|
1,197
|
|
4
|
-0,2611
|
0
|
-0,0034
|
-0,0132
|
-0,008
|
-1,197
|
-1,3219
|
1,3219
|
1,583
|
|
5
|
-0,7391
|
-0,2611
|
-0,0084
|
-0,0169
|
-0,03
|
-1,3219
|
-1,1339
|
1,1339
|
1,873
|
|
6
|
-1,2798
|
-0,7391
|
-0,0132
|
-0,0193
|
-0,017
|
-1,1339
|
-0,8112
|
0,8112
|
2,091
|
|
7
|
-1,7586
|
-1,2798
|
-0,0169
|
-0,0206
|
-0,019
|
-0,8112
|
-0,4961
|
0,4961
|
2,2547
|
|
8
|
-2,1153
|
-1,7586
|
-0,0193
|
-0,0212
|
-0,021
|
-0,4961
|
-0,2625
|
0,2625
|
2,3778
|
|
9
|
-2,3436
|
-2,1153
|
-0,0206
|
-0,0214
|
-0,021
|
-0,2625
|
-0,1267
|
0,1267
|
2,4703
|
|
10
|
-2,4719
|
-2,3436
|
-0,0212
|
-0,0215
|
-0,021
|
-0,1267
|
-0,0679
|
0,0679
|
2,5398
|
|
11
|
-2,5334
|
-2,4719
|
-0,0214
|
-0,0217
|
-0,022
|
-0,0679
|
-0,0587
|
0,0587
|
2,5921
|
|
12
|
-2,5632
|
-2,5334
|
-0,0215
|
-0,022
|
-0,022
|
-0,0681
|
0,0681
|
2,6313
|
|
13
|
-2,5893
|
-2,5632
|
-0,0217
|
-0,0223
|
-0,022
|
-0,0681
|
-0,0715
|
0,0715
|
2,6608
|
|
14
|
-2,6217
|
-2,5893
|
-0,022
|
-0,0225
|
-0,022
|
-0,0715
|
-0,0613
|
0,0613
|
2,683
|
|
15
|
-2,6565
|
-2,6217
|
-0,0223
|
-0,0226
|
-0,023
|
-0,0613
|
-0,0431
|
0,0431
|
2,6996
|
|
16
|
-2,6843
|
-2,6565
|
-0,0225
|
-0,0227
|
-0,023
|
-0,0431
|
-0,0278
|
0,0278
|
2,7121
|
|
17
|
-2,702
|
-2,6843
|
-0,0226
|
-0,0228
|
-0,023
|
-0,028
|
-0,0196
|
0,0196
|
2,7216
|
|
18
|
-2,7161
|
-2,702
|
-0,0227
|
-0,0228
|
-0,023
|
-0,0196
|
-0,0125
|
0,0125
|
2,7286
|
|
19
|
-2,7288
|
-2,7161
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0125
|
-0,0051
|
0,0051
|
2,7339
|
|
20
|
-2,7334
|
-2,7288
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0051
|
-0,0045
|
0,005
|
2,7379
|
|
21
|
-2,7351
|
-2,7334
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0045
|
-0,0058
|
0,0058
|
2,7409
|
|
22
|
-2,7357
|
-2,7351
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0058
|
-0,0075
|
0,0075
|
2,7432
|
|
23
|
-2,7359
|
-2,7357
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0075
|
-0,009
|
0,009
|
2,7449
|
|
24
|
-2,736
|
-2,7359
|
-0,0228
|
-0,0228
|
-0,023
|
-0,009
|
-0,0102
|
0,0102
|
2,7462
|
|
25
|
-2,736
|
-2,736
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0102
|
-0,0111
|
0,0111
|
2,7471
|
|
26
|
-2,736
|
-2,736
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0111
|
-0,0118
|
0,0118
|
2,7478
|
|
27
|
-2,736
|
-2,736
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0118
|
-0,0124
|
0,0124
|
2,7484
|
|
28
|
-2,736
|
-2,736
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0124
|
-0,0128
|
0,0128
|
2,7488
|
|
29
|
-2,736
|
-2,736
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0128
|
-0,0131
|
0,0131
|
2,7491
|
|
30
|
-2,736
|
-2,736
|
-0,0228
|
-0,0228
|
-0,023
|
-0,0131
|
-0,0133
|
0,0133
|
2,7493
|

10.
Оценка качества АСР при действии возмущения
При оценке качества АСР по каналу возмущения
главным является ответ на вопрос: справляется ли система с возмущением или нет?
Поэтому здесь важным является определение таких
показателей, как статическая и динамическая ошибки (и их сравнение с требуемыми
значениями или оценка исходя из требований «здравого смысла»), а так же расчет
времени регулирования.


11.
Вывод
Оптимальный режим работы данной системы
достигнут при настройках регулятора K1=0,005, K2=0,0015. При таких настройках
САУ удовлетворяет всем требованиям показателей качества, следовательно, система
работает хорошо.