Электрификация птичника с разработкой САР освещения в условиях ООО 'Колмогоровский бройлер'
Введение
Электроэнергия является одним из стержней
строительства экономики общества. Она играет важную роль в развитии и
осуществлении современного технического процесса всех отраслей, как
промышленности, так и сельского хозяйства.
В сельском хозяйстве, с каждым годом,
активизируется процесс замены ручного труда на механизированный с
использованием электроэнергии. При этом электрооборудование и автоматизация
производственных процессов позволяет высвободить большое число работников,
занятых в сельском хозяйстве, при одновременном повышении качества продукции,
экономичности, надёжности и бесперебойности работы агрегатов и установок.
Благодаря электромеханизации и автоматизации производственных процессов
электровооружённость труда в сельском хозяйстве на одного работника примерно
достигла 1,5…2,3 тыс. кВт/ч в год и даже выше.
Электрификация сельского хозяйства является
одним из основных направлений аграрной политики на современном этапе развития
сельского хозяйства. При высокой электровооруженности сельскохозяйственного
производства особую зависимость приобретают вопросы эффективного использования
электроэнергии, ее экономии, рациональной эксплуатации и ремонта
электрооборудования и их организации.
Чтобы обеспечить эффективное использование
электрооборудования и рационального применения электрической энергии,
необходимо правильно использовать методы технических расчетов в планировании,
управлении и анализе хозяйственной деятельности предприятия в целом и его
отдельных звеньев.
В условиях интенсивного развития энергетической
базы предприятий агропромышленного производства наибольшее значение приобретают
надежность электроснабжения и безаварийность работы электроустановок. Поэтому
требуется квалифицированное техническое обслуживание и ремонт оборудования.
Большое значение имеет автоматизация производственных процессов, которая
становится одним из факторов роста производительности труда, увеличение
количества продукции, повышения ее качества, снижение себестоимости и улучшение
условий труда.
В сельском хозяйстве наиболее значимыми являются
две крупные отрасли: растениеводство и животноводство. Деление различных видов
производств, в данном случае осуществлено по признаку предмета и объекта труда
- растения либо животные.
Птицеводство - одна из важнейших отраслей
сельского хозяйства, обеспечивающая население ценными продуктами питания. Оно
является одной из наиболее интенсивных и динамичных отраслей агропромышленного
комплекса страны.
Яйцо, мясо молодняка и взрослой птицы кур, уток,
гусей, индеек, а также продукты переработки: яичный порошок, паштет из печени,
суповые наборы, субпродукты, консервы - это далеко не полный перечень
продуктов, которые даёт птицеводство.
Развитие птицеводства во многом зависит от
селекционной работы, направленной на совершенствование продуктивных и племенных
качеств, создание новых пород, линий и кроссов всех видов сельскохозяйственной
птицы, а также полноценного и сбалансированного кормления и внедрения новой
высокоэффективной технологии. Ведение птицеводства на промышленной основе дает
возможность получать высококачественную продукцию с высокой эффективностью
оплаты корма.
Промышленность выпускает ряд комплексов
оборудования с различными типами клеточных батарей, в которых механизированы и
в значительной степени автоматизированы основные производственные процессы (до
95%).
В технологиях птицеводства освещение и
вентиляция играют весьма существенную роль. Имитация заката и рассвета,
воздухообмен в помещении способствует улучшению развития птицы, и благотворно
воздействует на их психику, не нарушая её, оказывает заметное стимулирующее
воздействие.
Целью дипломного проекта является электрификация
птичника с разработкой САР в условиях ООО «Птицефабрика «Колмогоровский
бройлер».
1. Экономическо-производственная
характеристика хозяйства ООО "Птицефабрика "Колмогоровский
бройлер" и состояние его электрификации
В качестве исходных данных для объекта
проектирования было выбрано сельскохозяйственное предприятие ООО «Птицефабрика
«Колмогоровский бройлер», расположенное в селе Колмогорово Яшкинского района
Кемеровской области, находящееся в 30 км от районного центра (р.п. Яшкино).
ООО «Птицефабрика «Колмогоровкий бройлер»
зарегистрировано по юридическому адресу: 652038, Кемеровская область, Яшкинский
район, село Колмогорово, микрорайон Молодежный 6. ООО «Птицефабрика
«Колмогоровкий бройлер» находится в северо-восточной зоне Кемеровской области.
Направление деятельности предприятия -
производство и реализация куриных яиц, мяса бройлеров, продуктов разделки тушки
бройлеров, субпродуктов птичьих, колбасных изделий, деликатесных продуктов из
мяса птицы (рулет, куры копченые, ветчина), замороженных полуфабрикатов
(котлеты, фарш, шашлык и др.). Также предприятие занимается выращиванием
зерновых культур для переработки на корм птице.
Все земли ООО «Птицефабрика «Колмогоровкий
бройлер» имеют площадь 4456 га. Территория, занимаемая корпусами, составляет 98
га земли, а под посевными площадями находятся собственный земельный участок
4358 га. На базе ООО «Птицефабрика «Колмогоровкий бройлер» основан ряд
обслуживающих цехов, инкубаторий, транспортный цех, РТМ, убойно-колбасный,
яйцесклад, кормоцех, электроцех, коптильный цех, котельная, медпункт и
столовая.
На 2010 год в ООО «Птицефабрика «Колмогоровкий
бройлер» имеется 340 545 голов птицы, в том числе взрослое поголовье - 180 152
голов, молодняк - 112 384, бройлеры - 48 009 головы.
Транспортный цех имеет 15 единиц автомобилей, 7
единиц комбайнов и 15 единиц тракторной техники. Транспортный цех обеспечивает
внутрихозяйственные транспортные работы, транспортировку продукции до пунктов
сбыта. На предприятии имеется машинно-тракторный парк, представленный в таблице
1.1.
Таблица 1.1 -
Состав машинно-тракторного парка ООО «Птицефабрика «Колмогоровский бройлер»
|
Наименование
|
Марка
|
Количество
|
|
Трактора
|
МТЗ-80
|
10
|
|
К-700
|
3
|
|
ДТ-75
|
2
|
|
Комбайны
|
«Енисей»
|
2
|
|
«Linguini»
|
3
|
|
«Class»
|
2
|
|
Автомобили
|
|
|
|
Грузовые
|
ГАЗ-31105
|
4
|
|
КамаЗ-5511
|
4
|
|
КамаЗ-5410
|
2
|
|
КамаЗ-5320
|
2
|
|
Легковые
|
ГаЗ-3110
|
1
|
|
УАЗ-469
|
2
|
За 12 месяцев 2009 года получено 34 038 тысяч
куриных яиц, из общего количества яиц реализовано 28 550 тыс. штук на общую
сумму 42 825 тыс. рублей, при фактической себестоимости 42 823 тыс. рублей.
Произведено мяса птицы 152 центнера, из них реализовано 131 центнер на общую
сумму 314,4 тысяч рублей, фактическая себестоимость составила 300 тыс. рублей.
От уборки урожая оприходовано зерно в количестве
24 162 ц. Все полученное зерно сдано в переработку для приготовления
комбикормов для птицы.
Основной сбыт яйца и мяса птицы производится
через покупателей за поставленный товар: корма, кормодобавки, а также через
рынки городов Кемеровской области.
Хозяйство полностью электрифицировано,
электроэнергию получает от внутренних электрических сетей ПЭС «Энергетик» по
линиям электропередач 10 кВ от подстанции 110/35/10 кВ. Протяженность ЛЭП 10 кВ
- 3 километра, 0,4 кВ - 5 км и кабельные линии 2 километра.
В ООО «Птицефабрика «Колмогоровкий бройлер»
резервных источников электроснабжения нет. На территории предприятия находится
14 подстанций. Это двухтрансформаторные подстанции типа КТПП - мощностью 2 ×
160, 2 × 150, 2 × 400 и
2 × 630 кВА, предназначенные для электроснабжения
потребителей первой категории. Конструктивно такие подстанции состоят из двух
блоков однотрансформаторных подстанций, соединенных между собой шинными
коробами. Общая мощность всех подстанций 15 970 кВА.
Наиболее энергоемкие потребители на данном
предприятии являются, в первую очередь, акклиматизаторы для 1 содержания
молодняка, где используются мощные калориферы и лампы инфракрасного излучения,
применяются 11 акклиматизаторов, также к энергоемким потребителям относятся
кормоцех с мощными дробилками кормов и убойный цех.
На предприятии работают 129 транспортеров
различного назначения и мощности. В кормоцехах под содержание кур-несушек
используют 48 транспортеров. В акклиматизаторах - 56 транспортеров и 25 в
кормоцехе.
Количество электродвигателей используемых в
электроустановках - около 1300 штук. Их мощность от 0,25 до 55 кВт.
Электродвигатели в основном типов 4А, АИР и АО, которые используются в
технологическом процессе для привода транспортеров, вентиляторов, насосов,
дробилок и вспомогательных механизмов.
На 2009 год установленная договорная величина
потребления активной электрической энергии с учетом субабонентов составляет
7530 тыс. кВтч. Фактически потребленная электроэнергия 7132 тыс. кВтч. На 2008
год договорная величина снижена до 5,5 млн. кВтч.
Потребление электроэнергии предприятием с каждым
годом снижается из-за уменьшения производственных мощностей.
Техническое состояние установок, применяемых в
хозяйстве, оценивается как удовлетворительное. Некоторые установки требуют
капитального ремонта, даже замену, что невозможно сделать своевременно из-за
тяжелого финансового положения предприятия.
Автоматизация объектов на предприятии достигла
90%. Такие важные и трудоемкие процессы как микроклимат, кормораздача,
пометоуборка, сбор яиц, инкубаторий полностью автоматизированы.
В состав электротехнической службы предприятия
входят: главный энергетик, инженер-электрик, шесть электромонтеров в
электроцехе, три дежурных электрика в инкубатории, две обмотчицы и
электрослесарь на мойке.
В должностные обязанности главного энергетика
входят организация работ по энергетическому обслуживанию производственных
объектов, надежное снабжение и эффективное применение всех видов энергии.
Анализирует выполнение графика ремонта и технического обслуживания
энергетического оборудования, ведет техническую документацию. Организует работу
работников энергетической службы, изготовление несерийного оборудования.
Инженер-электрик обязан замещать энергетика, во
время его отсутствия, отвечать за нормальное техническое состояние
электроустановок и электрооборудования, а также за электробезопасность при
выполнении всех работ. Инженер-электрик руководит электромонтажными работами,
контролирует качество ремонта электрооборудования, разрабатывает графики
проведения планово-предупредительных ремонтов и профилактических осмотров
электрооборудования, проводит своевременный инструктаж и проверку знаний по
электробезопасности у всего персонала хозяйства.
В обязанности электромонтеров входит
обслуживание электроустановок на закрепленном за ним участке, слежение за
техническим состоянием электрооборудования, своевременное устранение
неисправностей, слежение за выполнением ПТБ, ПТЭ, ПУЭ на закрепленном участке,
проведение обходов и осмотров оборудования, при этом слежение за режимами
работы, состоянием оборудования и чистоте рабочих мест, состоянием защитных
средств и противопожарного состояния. Результаты осмотров фиксируются в
оперативном журнале.
ООО «Птицефабрика «Колмогоровкий бройлер» в перспективе
намерено увеличить поголовье птицы до 360 тысяч голов, а, значит, увеличится и
производство яйца и мяса птицы и другой продукции птицеводства.
2. Обзор и анализ конструкций и
процессов работы в птичнике
Оборудование, которое используют в сельском
хозяйстве, представляет собой значительную часть основных фондов совхозов,
колхозов и других сельскохозяйственных предприятий.
Техническое состояние оборудования влияет на
условие труда и повышает его производительность. От бесперебойной работы оборудования
в большей степени зависит выполнение плана производства и повышает качество
продукции.
Птицеводство - сложная высокомеханизированная и
высокоэффективная отрасль сельскохозяйственного производства развивающееся
преимущественно на промышленной основе, в связи с наличием птицы нескольких
видов направлений продуктивности, раздробленности операций, специфичности
средств производства, технологий, кадрового состава рабочих и специалистов,
разнообразной промежуточной и конечной продукции. Углубление отраслевой и
внутриотраслевой специализации обусловлено состоянием материально-технической
базы не только птицеводства, но и отраслей, выпускающих средства производства,
уровнем развития науки.
При разработке генеральных планов птицефабрик
применяют принцип функционального деления территории на зоны, учитывающий
биологические особенности птицы на разных фазах развития. Предусматривают
отдельные зоны: моточного стада, промышленного стада, выращивания ремонтного
молодняка, подсобных производств и служб. Каждую зону изолируют санитарными
разрывами и насаждениями.
В одном птичнике содержат птицу одного возраста,
комплектование производят циклично.
В специализированных птицесовхозах объём
производства меньше(50 - 200 тыс. кур - несушек или до 1 млн. бройлеров в год).
Они не всегда имеют все подразделения для законченного цикла производства, но
располагают своей собственной кормовой базой, и частично комбикормами их
обеспечивает государство.
Для акционерных обществ (АО) и обществ с
ограниченной ответственностью (ООО), специализирующихся на выращивании птицы,
характерен ещё меньший объём производства(16, 20, 50 тыс. кур - несушек или
выращивание до 500 тыс. бройлеров в год). Они используют дешёвые корма
собственного производства и не рассчитаны на полный производственный цикл.
В птицеводстве различают: системы содержания
птиц - интенсивную, выгульную и комбинированную; способы содержания - клеточное
и напольное. На птицефабриках и в специализированных хозяйствах применяют
интенсивную систему, в племенных хозяйствах и в цехах маточного стада
(репродукторах), на птицефабриках - выгульную. Комбинированная система
предусматривает выращивание в клетках, а за тем в лагерях или птичниках с
выгулами (акклиматизаторах). Интенсификация птицеводства способствовала
усовершенствованию технологии выращивания.
Птицефабрики и птицефермы специализированы по
видам птицы (куры, утки, индейки) и направлениям (яичное и мясное). Кроме того,
их подразделяют по системам содержания птицы (напольная и клеточная) и по
назначению (товарные и племенные).
Основная продукция в товарных хозяйствах яичного
направления - яйца, сопутствующая - мясо, а в хозяйствах мясного направления
основная продукция - мясо, сопутствующая - яйца.
В хозяйствах по выращиванию ремонтного молодняка
основная продукция - ремонтный молодняк кур и суточные цыплята. В племенных
хозяйствах основная продукция - племенные яйца и племенная птица, сопутствующая
- пищевые яйца и мясо.
Уровень основных технологических процессов
птицеводства сравнительно высок. Птиц содержат в изолированных от внешней среды
безоконных птичниках с искусственными микроклиматом и освещением. Предпочтение
отдают клеточному содержанию, но применяют также и напольное содержание на
глубокой подстилке.
Побочная продукция во всех хозяйствах: пух,
перо, помет и другие утилизируемые отходы основного производства.
На всех птицефабриках обеспечивается законченный
оборот стада. Для этого предусмотрено содержание маточного и промышленного
стада кур-несушек, а также вывод цыплят и выращивание молодняка для обновления
(ремонта) стада кур.
При организации производственных процессов на
птицефабрике яичного направления предусматривают следующие возрастные периоды:
-140 дней - выращивание ремонтного молодняка для
комплектования промышленного стада в птичниках с клеточным содержанием;
-150 дней - выращивание ремонтного молодняка для
комплектования родительского стада в птичниках на глубокой подстилке;
-180 - доращивание ремонтного молодняка, и 510
дней содержание кур промышленного стада в птичниках с клеточным содержанием;
-180-510 - доращивание ремонтного молодняка, и
510 дней содержание кур родительского стада.
При организации производственных процессов на
птицефабрике мясного направления выделяют следующие возрастные периоды:
-63 дней - выращивание цыплят-бройлеров на мясо
на глубокой подстилке;
-150 дней - выращивание ремонтного молодняка на
глубокой подстилке;
-210 - доращивание ремонтного молодняка, и 480
дней содержание родительского стада на глубокой подстилке.
В технологию производства бройлеров входят:
содержание маточного стада в птичниках на глубокой подстилке, инкубация яиц в
инкубатории и выращивание цыплят в широкогабаритных птичниках с напольным или
клеточным содержанием. За 60-70 суток бройлеры достигают живой массы 1,2-1,5
кг.
В промышленном птицеводстве используются исключительно
групповое кормление с помощью желобковых и бункерных кормушек, причем измерение
количества корма базируется на изменении продолжительности его раздачи, что
возможно, только в том случае, если поток корма постоянен.
Кормление птицы зависит от её вида, возраста,
способа содержания и свойств корма, прежде всего от его влажности. При
групповом способе содержания продуктивной птицы применяют групповое (стадное)
кормление, регламент которого устанавливают исходя из зоотехнических
требований.
В основном для кормления применяют
сбалансированные по содержанию питательных веществ гранулированные или
рассыпные комбикорма, производимые на государственных или межколхозных
комбикормовых заводах, так же в хозяйствах практикуется кормление с колес, а
также после некоторой доработки комбикормов путем внесения определенных
премиксов и смешивания.
Птичники, как правило, комплектуют
одновозрастной и равнозначной по продуктивным свойствам птицей, которую
используют только в период достаточно высокой продуктивности. Выращивание
молодняка стремятся вести беспересадочно.
Птицеводство является высокоэффективной отраслью
сельскохозяйственного производства в которой применяются множество
разнообразных технологических процессов способствующих улучшению качества
товарной продукции высвобождению ручного труда. Промышленностью выпускается
различные комплекты оборудования для механизации и автоматизации основных
производственных процессов при клеточном и напольном выращивании бройлеров,
таких как кормление, поение, удаление навоза, регулирование микроклимата,
отопление, освещение.
Комплект Л-121
(рис. 2.1) поставляется из Германии. В комплект Л-121 входят следующие
сборочные единицы и агрегаты: бункеры хранения сухих кормов с выгрузным
шнековым транспортером; бункер-дозатор; система распределения корма, включающая
трубчатый кормораздатчик с цепно-дисковым тяговым рабочим органом, поворотные
блоки, спускные трубы и бункерные кормушки; одноярусные клеточные батареи;
система поения, включающая уравнительные бачки, трубы с ниппелями; система
уборки помета из-под батарей, включающая приводную станцию механизма продольной
системы, скрепер, ролики для тягового каната, поперечные транспортеры для
уборки помета из птичника; шкаф электрический распределительный и регулятор
вентиляции автоматический.
Комплект поставляют для птичников шириной 12 и
18 м. Для зданий шириной 12 м поставляются четыре батареи, а для зданий шириной
18 м - шесть батарей. Батареи комплекта состоят из секций, которые можно
составить в ряды длинной 88 м (в зависимости от длинны птичника). Каждая
клеточная секция состоит из двух индивидуальных клеток размером 2080×993×400
мм.
Размер ячейки подножной решетки (16×25
мм) и диаметр прудка (2 мм) обеспечивают свободное передвижение бройлеров по
ней и проваливание помета в пометную траншею.
В верхней решетке клетки имеются два проема,
перекрываемыми дверками, для посадки и выемки цыплят. В каждую клетку
устанавливают бункерную кормушку, диаметр поддона которой равен 400 мм, фронт
кормления - 1256 мм.

Рис. 2.1 - Схема
комплекта Л-121: I - помещение распределительного устройства; II - помещение
для выращивания птицы; 1 - транспортер поперечный для удаления помета; 2 -
транспортер продольный для удаления помета; 3 - клеточная секция; 4 - система
поения; 5 - автокормушка; 6 - система подачи корма с нисходящими трубами; 7 -
бункер-дозатор; 8 - транспортер шнековый; 9 - бункер хранения сухих кормов
Таблица 2.1 -
Техническая характеристика комплекта Л-121
|
Показатели
|
Для
зданий размером, м
|
|
18×95
|
18×84
|
18×72
|
12×84
|
12×94
|
|
Вместимость,
тыс. гол.
|
30…35
|
28…29,6
|
25…26
|
18…20
|
28,3…29,8
|
|
Установленная
мощность, кВт
|
19,2
|
19,2
|
19,2
|
14,2
|
14,2
|
|
Плотность
посадки, гол/м2 Птичника
|
21…21,3
|
20,3…20,6
|
19,8…20,1
|
18,1
|
21…21,3
|
|
Удельная
материалоемкость, кг/птице-место
|
1,08
|
1,1
|
1,15
|
1,1
|
1,05
|
|
Обслуживающий
персонал
|
|
Птичница
|
1
|
1
|
1
|
1
|
1
|
|
Слесарь
|
1
слесарь на 2 птичника
|
Транспортер универсальный
унифицированный ТУУ-2А (рис. 2.2) предназначен для
приема, горизонтального транспортирования и раздачи сухих кормов в бункера
раздатчиков кормов, расположенных внутри птичника, клеточного оборудования, для
содержания и выращивания птицы в птицеводческих хозяйствах во всех зонах
страны.
Транспортер ТУУ-2А выпускается в модификациях и
исполнениях для различного оборудования с числом линий клеток 4; 5; 6; 7; 8; и
шириной птичников 12 и 18 м.
В загруженном в транспортер ТУУ-2А корме не
допускается наличие посторонних предметов.
Транспортер ТУУ-2А работает в комплекте с
оборудованием птичника: наклонным транспортером наружного бункера (БСК-10 или
БСК-25); бункерными и цепными раздатчиками кормов клеточных батарей;
электрооборудованием.
Таблица 2.2 -
Техническая характеристика транспортера ТУУ-2А
|
Тип
транспортера (конвейера)
|
Станционный,
шнековый горизонтальный, секционный
|
|
Производительность
|
Не
менее 6,5 т/ч
|
|
Диаметр
шнека
|
100±4мм
|
|
Шаг
навивки шнека
|
125(+25мм....-15мм)
|
|
Частота
вращения шнека
|
296мин-1
|
|
Число
ступеней регулирования
|
1
|
|
Привод
|
Клиноременный
|
|
Установленная
мощность электродвигателя
|
1,1кВт
|
|
Частота
вращения электродвигателя
|
920мин-1
|
|
Диаметр
шкива ведущего
|
90мм
|
|
Диаметр
шкива ведомого
|
280мм
|
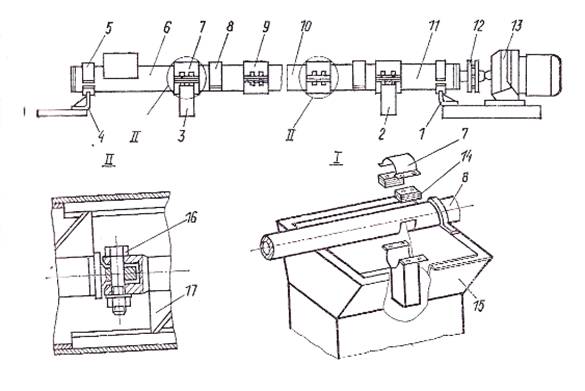
Рис. 2.2 - Схема
транспортера универсального унифицированного ТУУ-2А: 1, 4 - опоры; 2, 3 -
горловины; 5 - полухомут; 6 - секция приемная; 7 - скоба; 8, 9 - хомуты; 10 -
секция промежуточная; 11 - секция концевая; 12 - муфта;13 - привод; 14 -
прокладка; 15 - бункер; 16 - болт; 17 - шнек
Клеточная батарея КБУ-3
предназначена для выращивания цыплят бройлеров.
Таблица 2.3 -
Техническая характеристика батареи КБУ-3
|
Число
ярусов
|
3
|
|
Поголовье
молодняка в клетке:
|
|
В
1-й период (1…20…25дней)
|
30
|
|
Во
2 - ой период (20…25…40дней)
|
12…13
|
|
Габариты
батареи:
|
|
Длинна
|
От
28600 до 40900мм
|
|
Ширина
|
1320мм
|
|
Высота
|
2010мм
|
|
Масса
батареи
|
До
5300кг
|
Основу батареи составляет металлический каркас 5
(рис. 2.3), разделенный по вертикали на три яруса, а по горизонтали - на клетки
промежуточными стойками 3. На каркас навешен кормораздатчик 8, включающий
навесную тележку, бункера-дозаторы, круглозвенную цепь. Бункера кормораздатчика
сообщаются между собой рукавами для последовательного их заполнения кормом. В
боковых стенках бункеров имеются отверстия для прохода сварной калиброванной
цепи, которая закреплена с обеих торцевых сторон кормового желоба 10. Кормовые
желоба 10 снабжены вкладышами, на которые вручную насыпают корм в начальный
период выращивания.
Каждый ярус внизу имеет настил 17 из
конструкционного шифера (асбоцементных плит) или армированного стекла для сбора
помета. Клетки оборудованы сетчатыми подножными решетками 15 с размером ячеек
12,5×50
мм. Между поилками и настилом 17 имеется пометное пространство, в которое
помещается скрепер-скребок 16, отчищающий ярус от помета. Удаляют помет
одновременно с кормораздачей, но не менее четырех раз в сутки.
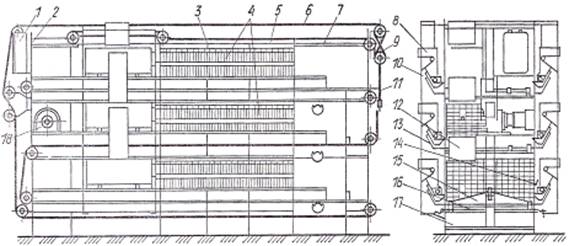
Рис. 2.3 - Схема
клеточной батареи КБУ-3: 1 - шкаф управления; 2 - передняя стойка; 3 -
промежуточная вертикальная стойка; 4 - дверка; 5 - каркас; 6 - канат; 7 -
проволока; 8 - кормораздатчик; 9 - задняя стойка; 10 -кормовой желоб; 11 -
натяжной винт; 12 - напорный бачок; 13 - кронштейн; 14 - поилка желобковая; 15
- подножная решетка; 16 - скрепер; 17 - пометный настил; 18 - электропривод
Комплект оборудования 2Б-3
(рис. 2.4) предназначен для выращивания бройлеров с 1 - ого дня до убоя.
Батарея 2Б-3 (рис. 2.5) включает каркас, состоящий из набора щитов 7,
соединенных между собой поясами 10 и уголками 8. По всей длине каркаса
протянуты десять проволок для навески боковых шторок 9, верхних сеток и сеток
пола 12. Торцевые части каркаса заканчиваются передней 1 и задней стойками. На
задней стойке смонтированы два блока, через которые пропущен канат, соединяющий
скребки первого и второго ярусов. Задняя стойка является несущей для установки
и крепления вертикальной трубы и двух обводных блоков кормораздатчика.
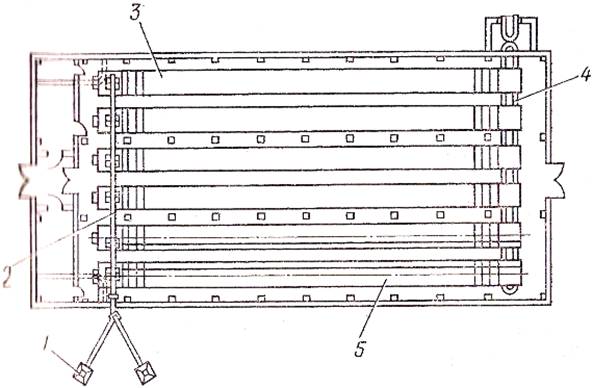
Рис. 2.4 - Схема
комплекта оборудования 2Б-3 в птичнике шириной 18м: 1 - бункер БСК-10; 2 -
транспортер; 3 - клеточная батарея; 4 - транспортер для уборки помета НКЦ 7 -
18; 5 - транспортер для распределения кормов канатно-дисковый
На передней стойке 1 установлен ведомый барабан
21, натяжной винт 22 с тремя блоками и тяги 20 с роликами. Натяжной винт 22
установлен так, чтобы он свободно перемещался по вертикали вместе с блоками и
обеспечивал требуемое натяжение каната пометоуборщика.
Тяги 20 с роликами соединены между собой
пружиной, служат для натяжения цепи, соединяющей ведущий и ведомый 21 барабаны,
и обеспечивают синхронное вращение фрикционных барабанов.

Рис. 2.5 - Схема
клеточной батареи 2Б-3: 1 - стойка передняя; 2 - поворотное устройство; 3 -
бункер-питатель; 4 - тяговый элемент; 5 - приводная станция; 6 - звездочка; 7 -
щит; 8 - уголок; 9 - шторка;10 - пометный пояс; 11 - кормушка бункерная; 12 -
сетка пола; 13 - ограждающая сетка; 14 - скребок; 15 - козырек; 16 - поилка
желобковая; 17 - труба; 18 - кран; 19 - выключатель конечный; 20 - тяги с
роликами; 21 - барабан ведомый; 22 - винт натяжной
Таблица 2.4 -
Техническая характеристика комплекта 2Б-3
|
Показатели
|
Для
зданий размером, м
|
|
18×72
|
18×84
|
18×96
|
|
Вместимость,
гол.
|
45360
|
54720
|
63660
|
|
Установленная
мощность, кВт
|
28,7
|
28,7
|
28,7
|
|
Плотность
посадки, гол/м2 птичника
|
31,3
|
32,5
|
33,3
|
|
Показатели
|
Для
зданий размером, м
|
|
18×72
|
18×84
|
18×96
|
|
Обслуживающий
персонал: Птичница Слесарь
|
1
1
|
1
1
|
1
1
|
Таблица 2.5 -
Техническая характеристика составных частей комплекта 2Б-3
|
Наименование
|
Для
зданий размером, м
|
|
18×72
|
18×84
|
18×96
|
|
Бункер
наружный БСК-10 со шнековым транспортером:
|
|
Число
на комплект
|
2
|
2
|
2
|
|
Вместимость
бункера, м3
|
9
|
9
|
9
|
|
Мощность
привода транспортера, кВт
|
0,5
|
0,5
|
0,5
|
|
Транспортер
универсальный унифицированный ТУУ-2:
|
|
Число
на комплект
|
1
|
1
|
1
|
|
Транспортер
поперечный:
|
|
Марка
|
НКЦ-7
- 18
|
НКЦ-7
- 18
|
НКЦ-7
- 18
|
|
Кормораздатчик
канатно-дисковый 2Б-3 - 05
|
|
Число
на комплект
|
6
|
6
|
6
|
|
Кормушка
бункерная:
|
|
Число
на комплект
|
756
|
912
|
1056
|
|
Наименование
|
Для
зданий размером, м
|
|
18×72
|
18×84
|
18×96
|
|
Установка
штанговая скреперная 2Б-03:
|
|
Число
на комплект
|
3
|
48
|
48
|
|
Батарея
2 - ярусная шириной 1870мм:
|
|
Число
на комплект
|
6
|
6
|
6
|
|
Длинна
батареи, м
|
65,5
|
78,24
|
90,0
|
Для дополнительного освещения нижнего яруса в
батарее установлено дополнительное низковольтное (36В) освещение, которое
включается в первые дни для создания необходимой освещенности в зоне кормушек.
Транспортируют птицу из цеха в контейнерах.
Технологический процесс поения
сельскохозяйственной птицы имеет свои специфические
особенности, которые обусловлены, с одной стороны, свойствами организма птицы
и, с другой - техническими данными оборудования.
Поилки должны обеспечивать птицу водой в
автоматическом режиме. Число поилок и их длину определяют по зоотехническим
нормам. Поилки рассчитывают на питание от водопроводной сети давлением до 0,5
МПа. Клапанные полки при этом работают через промежуточные ёмкости, снижающие
давление до 0,3…30кПа, в которых воду подогревают до температуры воздуха в
птичнике.
Применяют вакуумные, желобковые, чашечные,
микрочашечные и ниппельные поилки.
Вакуумная поилка
рассчитана на поение 100 цыплят с суточного до 10 - дневного возраста. Поилка
состоит из стеклянного баллона вместимостью 3 литра и круглого пластмассового
поддона. Баллон наполняют водой вручную, затем на него ставят поддон,
переворачивают и устанавливают поилку на пол. Вода из баллона через канал
самотеком поступает в желоб поддона. Такими поилками комплектуют оборудование
типа ЦБК для выращивания бройлеров на подстилке и типа КРМ для выращивания
ремонтного молодняка.
Желобковые поилки подразделяют
на проточные (рис.2.6, а, б, в) и с постоянным уровнем воды (рис. 2.6, г).
Проточную поилку (см. рис. 2.6, а) устанавливают
в клеточных батареях КБУ-3 и 2Б-3. В клеточной батарее 2Б-3 по две поилки
расположено на каждом ярусе внутри клеток, они рассчитаны на поение птицы с
суточного возраста до конца выращивания. Желобок поилки изготовлен из оцинкованной
стали.
V-образные проточные поилки (см.
рис. 2.6, б) устанавливают в клеточных батареях оборудования КОН по
внутренней оси. Такое расположение позволяет иметь достаточный фронт поения и
исключить попадание воды в корм, однако сильно затрудняет обслуживание поилок.
Уровень воды в поилке по всей длине должен быть 25...30 мм. Неравномерность
уровня не должна превышать 10 мм.
Полузакрытая проточная поилка
показана на рисунке 2.6, в. Такие поилки выполняют из пластмассовых труб
диаметром 40…100 мм и используют взамен вышедших из строя поилок из
оцинкованной стали.
Подвесная автопоилка АП-2А
(см. рис. 2.6, г) постоянного уровня состоит из поплавковой камеры и желоба 1
V-образной формы с силикатным эмалированным покрытием, свободно вращающейся
четырехлопастной вертушки 2 и подвески 3. Металлические вертушки, установленные
над желобом, не позволяют цыплятам влезать в него и загрязнять воду.
Воду в поилку подают из промежуточного бака под
давлением не более 50 кПа. Для чистки и мойки поилки воду сливают через отверстие
в конце желоба.

Рис. 2.6 -
Желобковые поилки: для батарей КБУ-3 и 2Б-3: 1 - кронштейн; 2 - желоб; 3 -
прижим; 4 - болт; 5 - стойка; б - для батарей типа КОН и КБР: 1 - желоб; 2 -
соединительное звено; в - полузакрытая: 1 - съемная пробка; 2 - трос; 3 - ввод
водопроводной воды; 4 - чистик; 5 - труба; б - сливная пробка; г - АП-2А: 1 -
желоб; 2 - вертушка; 3 - подвеска; д - поплавковая камера поилки АП-2А: 1 -
штуцер; 2 - корпус клапана; 3 - гайка; 4 - клапан; 5 - козырек; 6 - стопор; 7 -
крышка поплавковой камеры; 8 - регулировочная гайка; 9 - козырек; 10 -
поплавок; 11 - корпус поплавковой камеры;12 - рычаг клапана; 13 - пробка
Цепочно-тросовая подвеска служит не только для
подъема и опускания поилок с помощью лебедки, но и для регулировки
горизонтальности желоба. Предварительно горизонтальность желоба регулируют
подбором звена цепочки, а затем стяжками.
Постоянный уровень воды в желобе поддерживают
поплавком 10 (рис. 2.6, д). При заполнении камеры водой поплавок 10 всплывает
и, поворачивая во круг шарнира рычаг 12, закрывает отверстия в корпусе 2,
прекращая подачу воды в поилку. Уровень воды в желобе устанавливают и
регулируют подъемом или опусканием поплавка 10 в рычаге клапана с помощью
регулировочной гайки.
Микроклимат:
Для обеспечения высокой продуктивности птицы в птицеводческих помещениях
необходимо поддерживать неопределенные параметры микроклимата. Под
микроклиматом понимают основные физические и химические факторы воздушной
среды, которые комплексно влияют на организм птицы (температура, влажность,
химический состав воздуха, скорость его движения, запыленность, ионизация и
др.)
В создании оптимального микроклимата наиболее
важную роль играют вентиляция и отопление помещений.
Отопление
птицеводческих помещений. В холодный и переходные периоды года практически
невозможно поддерживать оптимальные параметры микроклимата без подогрева
воздуха. Для обогрева птичников применяют в основном воздушное отопление,
совмещенное с вентиляцией. Приточный воздух нагревается различными воздухонагревательными
устройствами (водяные и паровые калориферы, электрокалориферы,
тепловентиляторы, теплогенераторы). Выбирают воздухонагреватели в зависимости
от конкретных условий хозяйства. В условиях птицефабрик, когда на малой площади
сосредоточено большое количество зданий, сооружают общую котельную. В этом
случае экономически оправданно использование водяного отопления, водяных или
паровых калориферов и тепловентиляторов. Если имеются большие запасы
электроэнергии, которую можно использовать на отопление, то рационально
применять электрокалориферы. В зонах с непродолжительным отопительным периодом,
на малых фермах, когда отапливаемых птичников мало или они находятся на
значительном расстоянии один от другого, используют теплогенераторы.
Системы отопления подразделяют на центральные и
местные. Центральная система включает в себя один источник теплоты (центральная
котельная), связанный трубопроводами (тепловые сети), передающими
теплоноситель, с нагревательными приборами.
В местной системе отопления источник теплоты
устанавливают в птичнике или пристройке.
В качестве отопительных приборов используют
чугунные радиаторы, стальные панели, конвекторы, чугунные или сталечугунные
ребристые трубы, гладкотрубные приборы, которые изготавливают в виде змеевиков
или регистров из стальных труб.
Вентиляция.
Существуют системы естественной и принудительной вентиляции. При естественной
вентиляции воздухообмен происходит за счет ветра и благодаря разности давлений
внутри и вне здания, обусловленной разностью температур.
Системы естественной вентиляции работают
нормально при температуре наружного воздуха до -10 0С. При более
низких температурах теплоты, выделяемой птицей, не хватает для поддержания
нормальной температуры помещения, тогда объем вентиляции уменьшают, прикрывая
воздухоподводящие каналы. Вследствие этого повышается влажность и ухудшается
состав воздуха. При одинаковой температуре снаружи и внутри здания воздухообмен
прекращается. Системы принудительной вентиляции лишены этого недостатка.
Различают вытяжную, приточную и приточно-вытяжную
схемы вентиляции.
Наибольшее распространение, особенно в нашей
стране, получила схема вентиляции, в которой вытяжные вентиляторы устанавливают
в обеих продольных стенах, а приток осуществляется через шахты в крыше. Воздух
в помещении движется сверху вниз против действия теплового и ветрового напоров.
По такой схеме работает вентиляция большинства птичников.
Для создания и поддержания микроклимата в
птицеводческих помещения используют комплекты оборудования типа «Климат» они
поддерживают нормативные параметры воздушной среды за счет изменения
воздухообмена, обеспечиваемого автоматическим регулированием скорости вращения
вытяжных вентиляторов при отклонении температуры воздуха в птичнике от
заданного значения.
3. Технологическая характеристика
птичника для содержания кур-бройлеров
Птичник представляет собой кирпичное здание,
габаритные размеры которого составляют 105×18×3. Схема
птичника показана на рисунке 3.1.

Рис. 3.1 - Схема
птичника для содержания кур-бройлеров: 1 - коридор, 2 - операторская, 3 -
батарея каскадная трехъярусная, 4 - механизм скребковый пометный, 5 -
вентиляционная камера, 6 - инвентарная, 7 - транспортер скребковый, 8 -
помещение для птиц, 9 - транспортер кормозагрузки, 10 - уборная
.1 Выбор оборудования птичника
Для содержания кур-бройлеров в птичнике размером
96×18×3
выбираем
клеточную батарею БКМ-3Б. Поэтому в дальнейшем мы будем рассматривать
оборудование, входящее в состав батареи БКМ-3Б.
Комплект оборудования БКМ-3Б предназначен для
выращивания бройлеров от 1 до 140 дней, за исключением рода антикоррозионного
покрытия подножной решетки клеточной батареи. В батареях для выращивания
бройлеров она имеет полиэтиленовое покрытие зеленого цвета, а в батареях для
ремонтного молодняка покрытие выполнено методом горячего цинкования.
Комплекты оборудования представляют систему
механизмов и устройств, обеспечивающих подачу корма птице, снабжение птицы
водой, регулярную уборку и удаление помета из птичника. Управляют механизмами
от шкафов управления, как в ручном, так и в автоматическом режиме.
Корм из бункера 1 (рис. 3.2) подается наклонным
транспортером в приемник горизонтального транспортера 2, который последовательно
загружает бункера, каскадных батарей 3.
При заполнении бункера последней батареи
срабатывает выключатель подачи корма, установленный на стенке горловины, и
двигатели линии кормоподачи (БСК-10, ТУУ-2А) отключаются. При понижении уровня
корма в бункерах клеточных батарей и освобождении выключателя подачи корма
снова включаются двигатели линии кормораздачи.
Двигатели кормораздачи на клеточных батареях
включаются от реле времени.
Корм на каждом ярусе раздается кормораздатчиком
цепного типа, питание всех линий кормораздачи происходит от единого бункера. На
входе в кормушку вставлены сетчатые вкладыши, предохраняющие птицу от попадания
носами на цепь кормораздатчика. На протяжении всего периода выращивания птицы в
клетках сетчатые вкладыши должны находиться в кормушках.
В данном птичнике используются капельные
автопоилки, питаемые через разделительный бак с автоматическим поддержанием
уровня. Подача воды из водопроводной сети к поилкам осуществляется через
индивидуальные бачки постоянного уровня (путем отгиба рычага поплавка уровень
воды должен находиться на 10…15мм ниже переливного отверстия), установленные с
двух концов батареи на каждом ярусе, и водоводные трубы. В бачках установлены
фильтры для отчистки воды от механических включений.
Для поения птицы внутри клеток на водоводных
трубах устанавливают микрочашечные (клапанные) поилки. В зависимости от
возраста птицы высоту поилок можно регулировать при помощи лебедок.
Периодичность уборки помета зависит от способа
содержания птицы. При клеточном содержании помет убирается ежедневно. С настила
второго и третьего ярусов убирают скребками в зазор между настилами, имеющийся
по всей длине батареи. Из траншей под клетками на поперечный транспортер помет
удаляют установками МПС-2М. Поперечный транспортер НКЦ подает помет за пределы
здания птичника в транспортные средства.
Рис. 3.2 - Схема
комплекта оборудования БКМ-3Б в птичнике размером 18×96м:
1 - бункер сухих кормов БСК-10; 2 - транспортер ТУУ-2А; 3 - каскадная батарея;
4 - установка для уборки помета МПС-2М
Особенностью клеточных батарей БКМ-3Б является
каскадное расположение блоков клеток (рис. 3.3), обеспечивающее хороший
воздухообмен, освещенность гнезд и удобство обслуживания птицы. Блок выполнен
из сетчатых деталей, скрепленных между собой скобами. Под третьим и вторым
рядами блоков гнезд крепят оцинкованные металлические пометные настилы 8, на
которых располагают скребки 7, для сброса помета в зазор между настилами в
пометную траншею 12 под батареей. В передней части клеток находится кормушка 9,
зафиксированная в кронштейнах 10 рам каркаса. На передней стенке каждой клетки
имеется дверка 1 для посадки и высадки птицы. Дверка в закрытом состоянии
фиксируется крючком. Поперечные перегородки клеток в передней части заканчиваются
сплошной частью перегородки, в которой имеется паз для прохода водоводной трубы
и её подъема и отверстие для проволоки и каната регулировки уровня водоводных
труб. Каркас блоков - клеток соединяется стяжками (на втором и третьем ярусах)
с передней и задней стойками батареи. Каскадное расположение клеток батареи
создает благоприятные условия для работы механизма уборки помета на батарее. С
наклонных настилов помет счищают скребками 7 облегченной конструкции. Два
скребка закреплены на тяговом канате и приводится в движение от одного
двигателя.
Из птичника помет удаляют установками МПС-2М и
НКЦ-7 (типа ТСН-3,0Б).

Рис. 3.3 - Схема
клеточной батареи БКМ-3Б: 1 - дверка; 2 - крышка; 3 - подножная решетка; 4 -
решетчатая крышка кормушки; 5 - фигурная пластина; 6 - поилка; 7 - пометный
скребок; 8 - пометный настил; 9 - кормушка; 10 - кронштейн; 11 - стойка; 12 -
пометная траншея
Для данного птичника регулирование микроклимата
осуществляется с использованием комплекса оборудования «Климат-4», которое
обеспечивает регулирование подачи воздуха вентиляторами вручную, либо
автоматически в зависимости от температуры воздуха внутри помещения.
Подача воздуха регулируется ступенчато путем
подачи одной из трех ступеней питания на зажимы электродвигателей и изменение
числа подключенных вентиляторов.
Для поддержания допустимых пределов температуры
используют электрокалориферные установки типа СФОЦ. Преимущества их состоит в
том, что в данном агрегате сочетается отопительный прибор и приточная
вентиляция. Приток подогретого воздуха обеспечивает оптимальные параметры
воздушной среды помещения по температуре, влажности и газовому составу в
соответствии с требованиями санитарно - гигиенических норм. Единовременные
затраты на калориферное отопление на 50…70% меньше, чем при электрокотельном
отоплении.
Освещение выполнено светильниками типа НСП-02.
4. Расчет электропривода
Под электроприводом понимают электромеханическую
систему, состоящую в своем наиболее развитом виде из преобразовательного, электродвигательного,
передаточного и управляющего устройств. Иногда преобразовательное и
передаточное устройства отсутствуют.
Электропривод должен качественно обеспечивать
нормальное протекание технологического процесса при расчетной
производительности рабочей машины и высокой экономической эффективности. При
выборе рационального электропривода необходимо соблюдать следующие условия:
· наиболее полное соответствие электропривода
приводным характеристикам рабочей машины (технологическим, кинематическим,
механическим, нагрузочным и инерционным);
· максимальное использование мощности
электродвигателя в процессе работы;
· соответствие электропривода
параметрам питающей его сети;
· приемлемый внешний вид, удобство и
безопасность эксплуатации.
В основном задача выбора сводится к оценке
соответствия электропривода рабочей машины.
В большинстве случаев в качестве электропривода
используют коротко замкнутые асинхронные двигатели, так как они наиболее
дешевы, просты по конструкции и надежны в эксплуатации.
Для цепного транспортера двигатель выбирают по
формуле:
расч.
= Q/(367·ηн)
· (Lf+(h/ηт)),
[9, 12.4]
где Q - подача транспортера, Q = 2,0 т/ч; ηн
- КПД передачи движения от электродвигателя к транспортеру, ηп
= 0,75; L - горизонтальная составляющая пути передвижения груза, L = 174 м; f -
коэффициент сопротивления движения; f = 2,25; h - высота подъема, h = 0; ηт
- КПД транспортера, ηт
= 0,6.
Ррасч. = 2/(367·0,75) ·
(178·2,25+(0/0,6)) = 2,7 кВт.
Выбираем электродвигатель серии 4А100S4У3; Рн
= 3 кВт; Iн = 7,3 А; n = 1430 мин-1; ki
= 6,0; η = 0,82; cosφ = 0,83; λmax.
= 2,4; λп
= 1,2; λmin.
= 1,6.
Проверяем двигатель на перегрузочную
способность:
Рн ≥ Рпер = 1,33Рmax./
λmax.
,33·3 / 2,4 = 1,7 кВт.
кВт > 1,7 кВт.
Проверяем двигатель на возможность пуска:
Угловая скорость двигателя: ωн
= 3,14 · 1430/30 = 149,6 рад/с-1.
Угловая скорость машины: ωм
= 3,14·28,60/30 = 2,9 рад/с-1.
Номинальный момент двигателя: Мн =
3000/149,6 = 20,1 Н·м.
Момент сопротивления машины приведенный к валу
электродвигателя:
Мспр = Мсωм/ωн;
Мн ≥ Мнп = 1,25Мспр/(λmin.u2).
Мспр = 603 · 2,9/149,6 = 11,6 Н·м.
Мн = 1,25·11,6/(1,6·0,9252)
= 10,59 Н·м.
Так как Мн = 20,1 Н·м > Мнп
= 10,59 Н·м, пуск двигателя при максимальной нагрузке 3 кВт обеспечивается.
Для кормозагрузочного транспортера двигатель
выбирается аналогично.
Выбираем двигатель 4А90L6У3; Рн = 1,5
кВт; Iн = 4,1; η = 0,75; cosφ=0,74; ki
= 5,5; λmax.=
2,2; λп=
2,0; λmin.=
1,6.
Выбираем двигатель для шнекового транспортера,
подающего корм из бункера на кормозагрузочный транспортер.
Мощность шнекового транспортера находится по
формуле:
Рн= Q/367ηн·(Lf
+ (h/ηт))k,
где k - поправочный коэффициент, зависящий от
угла наклона транспортера.
Рн= 20/(367·0,6)·(4·1,2 +
(2,5/0,6))·1,4= 1,15 кВт.
Выбираем двигатель 4А90L6У3; Рн = 1,5
кВт; Iн = 4,1 А; η = 0,75; cosφ=0,74;
ki = 5,5; λmax.
= 2,2; λп
= 2,0;
λmin. = 1,6.
Проверка осуществляется аналогично проверке
цепного транспортера.
Параметры всех электродвигателей приведены в
таблице 4.1.
Таблица 4.1 - Параметры
выбранных электродвигателей
|
Тип
двигателя
|
Кол-во
|
Iн,А
|
Рн,кВт
|
nн,
мин-1
|
Cosφ
|
λmax
|
λmin
|
λп
|
ki
|
η, %
|
|
Цепной
тр-р. 4А100S4У3
|
6
|
7,3
|
3
|
1430
|
0,83
|
2,4
|
1,6
|
1,2
|
6,0
|
82
|
|
Кормозагр.
тр-р. 4А90L6У3
|
1
|
4,1
|
1,5
|
1000
|
0,74
|
2,2
|
1,6
|
2,0
|
5,5
|
75
|
|
Шнековый
тр-р. 4А90L6У3
|
1
|
4,1
|
1,5
|
1000
|
0,74
|
2,2
|
1,6
|
2,0
|
5,5
|
75
|
|
Тросошайбовый
тр-р. 4100S4У3
|
3
|
7,3
|
3
|
1430
|
0,83
|
2,4
|
1,6
|
1,2
|
6,0
|
82
|
|
Горизонтальный
тр-р. 4А90L6У3
|
1
|
4,1
|
1,5
|
1000
|
0,74
|
2,2
|
1,6
|
2,0
|
5,5
|
75
|
|
Наклонный
тр-р. 4А90L6У3
|
1
|
4,1
|
1,5
|
1000
|
0,74
|
2,2
|
1,6
|
2,0
|
5,5
|
75
|
|
Тр-р.
уборки помета из клеток 4А100S4У3
|
6
|
7,3
|
3
|
1430
|
0,83
|
2,4
|
1,6
|
1,2
|
6,0
|
82
|
5. Расчет вентиляции и отопления
Для создания оптимального микроклимата в
птицеводческих помещениях и его автоматического регулирования применяют серийно
выпускаемые комплексы вентиляционно-отопительного оборудования. Применение этих
комплексов позволяет создавать равномерное распределение приточно-вытяжных
струй, смещение приточного и внутреннего воздуха, а так же обеспечить
равномерную температуру во всем помещении.
.1 Расчет вентиляции
Для вентиляции птицеводческих помещений
используются оборудование «Климат - 4». Вентиляция птицеводческих помещений
применяется для поддержания в допустимых нормами пределах влажности,
температуры и содержание вредных газов.
Для вентиляции используют центробежные и осевые
вентиляторы, которые, как правило, соединяются с электродвигателем
непосредственно.
Для расчета вентиляции определяют количество
углекислоты выделяемой птицами в течении часа:= 1,7 · 30000 = 51000 л/ч,
где 1,7 л/ч - количество углекислоты выделяемой
одной птицей [9, табл. 10.1]; 30000 - количество кур-бройлеров в птичнике.
Количество углекислого газа, содержащегося в 1м3
наружного воздуха, принимаем С1 = 0,3 л/м3, а допустимое
его количество в 1м3 воздуха внутри птичника [9, табл. 10.2] C2
= 2,5 л/м3.
Требуемый часовой воздухообмен по условию
удаления CO2:
= 1,2С / (С2 - С1).
L = 1,2 · 51000/(2,5 - 0,3) = 27818 м3/ч
Количество влаги, выделяемое птицей в течение
часа, с учетом норм таблицы [9, 10.1] и поголовья птицы:
W1 = 3 · 30000 = 90000 г/ч.
Количество
влаги, содержащееся в 1м3 наружного воздуха при температуре - 3°С (d1нас
= 3,81 г/м3, табл. [9, 10.3]) и относительной влажности φ1 = 0,9:1
= 3,81 · 0,9 = 3,43 г/м3.
Допустимое
количество влаги в 1м3 воздуха внутри помещения определяется при
минимальной температуре 7°С (d2нас = 7,8 г/м3, [9, табл.
10.3]) и допустимой относительной влажности φ2 = 0,75 [9,
табл.10.2], так как расчеты показывают, что с уменьшением температуры внутри
помещения требуемый часовой воздухообмен увеличивается:2 = 7,8 ·
0,75 = 5,85 г/м3.
Требуемый
часовой воздухообмен по условиям удаления влаги:
=
1,1W1/(d2 - d1).
=
1,1· 90000/(5,85 - 3,43) = 41000 м3/ч.
Берут
наибольшее значение требуемого часового воздухообмена L = 41000 м3/ч,
с учетом равномерного распределения вентиляторов в птичнике выбирают
вентиляторы ВО5 с подачей L1 = 6000 м3/ч при давлении
19,6 Па. Число вентиляторов n = L/L1 = 41000/6000 = 6,83. Принимают
n = 7.
Вентиляторы
ВО5 комплектуются электродвигателями с повышенным скольжением мощностью 0.37
кВт.
.2
Расчет отопления
Одни
и те же условия микроклимата могут быть созданы различными системами отопления
и видами оборудования, поэтому их выбор проводят на основе
технико-экономических расчетов.
Электрические
калориферы - это приборы для нагрева воздуха при помощи ТЭНов или открытых
нагревателей. Электрокалориферные установки оснащаются центробежными или
осевыми вентиляторами, устройствами регулирования мощности, подачи воздуха,
управления сигнализации и другими элементами.
Расчетная
температура наружного воздуха - 25°С, но по многолетним наблюдениям возможно
снижение температуры до - 35°С.
Исходные
данные: Птичник на 30000 кур-бройлеров, размеры птичника: 96×18×3м, здание
птичника кирпичное, толщина стен 395 мм., окна и ворота двойные, калорифер
устанавливают в здании птичника. Температура в птичнике согласно нормам должна
поддерживаться 18°С. Расчетная температура воздуха - 35°С. Калорифер питается
от сети 380/220 В, кратность воздухообмена kв = 5.
Теплота,
выделяемая птицами на 1 кг массы согласно НТП - СХ - 4 - 72 составляет 11 Вт.
Принимая массу одного бройлера 1,3 кг, определяют общее количество теплоты,
выделяемое птицами в помещении:n = 1,3 · 11 · 30000 = 429000 Вт =
429 кВт.
Площадь
перекрытия: Fпер = 96 · 18 = 1728 м2.
Площадь
стен: Fст = 2 · 96 · 3 + 2 · 18 · 3 = 684 м2.
Площадь
ворот Fв и окон Fок принимаем 5% от площади стен:в
= Fок = 0,05 · 685 = 34,25 м2  34 м2.
34 м2.
Потеря
теплоты через ограждения:
Pо = ΣkF(υп
- υн) · 10 - 3,
[7, 9.7]
где k - коэффициент теплопередачи ограждений,
Вт/(м2·°С) (значение k [7,стр.85]); F - площадь ограждения, м2;
υп
- температура воздуха внутри помещения, °С; υн
- расчетная температура наружного воздуха, °С.
Pо = (1,17 · 1728 + 1,54 · 684 + 2,33
· 34 + 2,68 · 34) · (18 - (- 35) · 10 - 3 = (1729,17 + 1053,36 +
79,22 + 91,12) · 53 · 10 - 3 = 157 кВт.
Теплота, уносимая с вентилируемым воздухом:
в
= СγQ(υп
- υн)kв · 10
- 3, [7, 9.8]
где С - удельная теплоемкость воздуха, С = 0,28
Вт·ч/(кг·°С); γ - плотность наружного
воздуха, кг/м3; Q - объем помещения, Q = 96 · 18 · 3 = 5184 м3;
kв - часовая кратность воздухообмена, kв = 5.в
= 0,28 · 1,342 · 5184 · (18 + 35)· 5 · 10 - 3 = 516 кВт.
Расчетная теплота калорифера:
т
= Pо + Pв - Pп.
т
= 157 +516 - 429 = 244 кВт.
Мощность калорифера:
к
= Pт/ŋк.
к
= 244/1 = 244 кВт.
Выбираем две калориферных установки СФОЦ -
100/0.5Т. Общая мощность каждой Pо = 94 кВт, мощность
электрокалорифера Pк = 90 кВт, число секций - 3, 36 нагревателей.
Подача вентилятора при температурном перепаде 51…30 °С 1,25…2,5 м2/с
двигатель Да112М4С.
Третью установку СФОЦ - 60/0.5Т, общая мощность
Pо = 69 кВт, мощность калорифера Pк = 67,5 кВт, 3 секции,
27 нагревателей, при температурном перепаде 50…30°С подача вентилятора 0,9…1,6
м2/с, тип двигателя Да9014С. Калориферные установки размещают в
специальных помещениях с торцов здания. С одной стороны устанавливают одну
установку СФОЦ - 100/0.5Т, с другой две другие.
6. Расчет освещения
Электрическое освещение - важный фактор, от
которого в значительной мере зависит комфортность пребывания и работы людей,
продуктивность птицы.
Основные показатели искусственного освещения
должны обеспечить нормальные и безопасные условия труда людей и содержания
птицы, способствовать повышению производительности труда и качества продукции.
В качестве источников света обычно применяют
лампы накаливания и люминесцентные лампы.
Основное достоинство ламп накаливания простая
конструкция, сравнительно невысокая стоимость, надежность.
В зависимости от конкретных условий для расчета
освещения может быть применен один из методов: точечный, коэффициент
использования светового потока, удельной мощности. Выбираем метод коэффициента
использования светового потока, этот метод применяют при расчете общего
равномерного освещения закрытых помещений при отсутствии существенных
затенений.
Размер помещения для птиц 96 ×
18 × 3м, в котором содержится 30000 птиц.
Минимальная освещенность в птичнике Εmjn
= 30 лк [7 табл. 10.1], для общего освещения выбирают светильники НСП - 02 с
высотой подвеса hр=2,5м.
Определяют общее количество светильников:
Высота установки светильника hр=2,5м.
Рекомендуемое расстояние между светильниками
находят из формулы:
ab
= λ с · hр,
где λс
- светотехнически наивыгоднейшее относительное расстояние между светильниками (λс
= 1,0…1,5), λс
= 1.ab = 1 · 2,5 = 2,5 м.
Расстояние от стены до ближайшего ряда lb
или до ближайшего светильника в ряду la принимают в пределах
(0,3…0,5):a = lb = 0,4Lab = 0,4 · 2,5 = 1 м.
Определяют число рядов светильников:
2
= ((B - 2 · 1b)/Lb) + 1.
2
= ((18 - 2)/2,5) + 1 = 7,4 - принимают N2 = 7 рядов.
Определяют число светильников в одном ряду:
1
= ((A - 2 · 1a)/La) + 1.
1
= ((96 - 2)/2,5) + 1 = 38,6 - принимают N1= 39 светильников в ряду.
Общее число светильников:
= N1 · N2.
= 7 · 39 = 273 светильника.
Определяют световой поток лампы по формуле:
ФР
= (Eн · kз
· S · z)/(N · η), [7, 10.1]
где Eн - нормируемая освещенность Eн
= 30лк; kз - коэффициент запаса kз = 1,15 [7, таб. 10.4];
S - площадь птичника, S = 96 · 18 = 1728м2; z - коэффициент
минимальной освещенности z = 1,15 [7, табл. 10.5]; N - число светильников; η
- коэффициент
использования светового потока, который определяют по таблице в зависимости от
индекса помещения.
Коэффициент отражения света от потолка ρп
= 50%, от стен ρс
= 30%, от рабочей поверхности ρр
= 10%.
Индекс (i) помещения находим по формуле:
i = S/(h(A + B)), [7,10.2]
= 1728 / (2,5 · (96 - 18)) = 6.
По таблице
η
= 0,69.
Фр = 30 · 1,15 · 1728 · 1,15 / (273 ·
0,69) = 364 лм.
Выбирают лампу БК - 220 - 230 - 40 с номинальным
световым потоком 415 лм.
Для освещения птичника берут 273 светильника
типа НСП - 02 - 100 с лампами накаливания БК - 220 - 230 - 40.
Проводим поверочный расчет:
= Фл Nη/(kSz).
= 364 · 273 · 0,69 / (1,15 · 1728 · 1,15) = 30
лк.
Разница между фактической о нормированной
освещенностью отсутствует.
Мощность одного ряда: Рр = 39 · 40 =
1560 Вт = 1,56 кВт.
Проводим расчет освещения в подсобных
помещениях. Расчет ведем методом коэффициента использования светового потока.
Проводим расчет освещения в коридоре размером 3 ×
4 × 3 м.
Коридор относится к помещениям с малым
выделением пыли. Коэффициенты отражения: стен ρс
= 0,3; потолка ρп
= 0,5; рабочей поверхности ρр
= 0,1. Освещение выполняют светильниками с лампами накаливания Emin
= 20 лк. Выбираем к установке светильники типа НСП - 02 с высотой подвеса над
рабочей поверхностью h = 2,5м. определяем оптимальное расстояние между светильниками
в ряд (λ
= 1,6…1,8), λ = 1,6.
La = 1,6 · 2,5 = 4 м.
Число светильников в ряду:
N1 = A/La.
1
= 3 / 4 = 0,75; принимаем
na = 1.
Определяем число рядов:
2
= B/La.
2
= 4 / 4 = 1.
Общее число ламп N = 1 · 1 = 1.
Определяем индекс помещения i:= 12 / (2,5 · (3 +
4)) = 0,69.
По значениям ρс
= 0,3; ρп
= 0,5; ρр
= 0,1 и i = 0,69 в таблице [9, 26.3] находим коэффициент использования
светового потока η = 0,27. По
таблице [7, 10.4] принимаем коэффициент запаса k = 1,3, коэффициент минимальной
освещенности z = 1,2 [7, 10.5].
Определяем расчетный световой поток Фр:
Фр = 20 · 1,3 · 12 · 1,2 / (1 · 0,27)
= 1387 лм.
По справочной таблице [5, 7] выбираем лампу
накаливания типа Б215 - 225 - 100 на напряжение 215 - 225В мощностью 100Вт.
Световой поток лампы Фл = 1350 лм.
Проводим поверочный расчет: Е=1350·1·0,27 /
(1,3·12·1,2)=19,4 лк
Разница между фактической и нормированной
освещенностью составляет 0,6 лк, или -3%, что не выходит за пределы допустимых
отклонений 20 и -10%.
Так как оба коридора, инвентарная и уборная
одинаковы то расчет и аппаратура идентичны.
Проводим расчет освещения в операторской
размером 6 × 4 × 3 м. расчет
проводим методом коэффициента использования светового потока. Операторская
относится к помещениям с малым выделением пыли. Коэффициенты отражения
идентичны коэффициентам отражения, используемым при расчете освещения коридора.
Освещение выполняют светильниками с лампами накаливания Еmin = 20
лк.
Выбираем светильники типа НСП - 02 с высотой
подвеса над рабочей поверхностью h = 2,5 м.
Принимаем λ = 1,6.
La = 1,6 · 2,5 = 4м.1 = 6
/ 4 = 1,5 принимаем N1 = 2.2 = 4 / 4 = 1.= 2 · 1 = 2.
Определяем индекс помещения: i = 24 / (2,5 · (6
+ 4)) = 0,96.
По таблицам принимаем η
= 0,37; k = 1,3; z = 1,2.
Определяем расчетный световой поток:
Ф = 20 · 1,3 · 24 · 1,2 / (2 · 0,37)= =1012 лм.
Выбираем лампу БК215-225-75 на напряжение
215-225 В мощностью 75 Вт, световой поток лампы Ф = 1020 лм.
Проводим поверочный расчет:
Е = 1020 · 2 · 0,37 / (1,3 · 24 · 1,2) = 20,2
лк.
Разница составляет 0,2 лк, или 1%, что не
выходит за допустимые нормы.
Так как размеры всех вентиляционных камер и
операторской одинаковы то расчет и аппаратура идентичны, данные занесены в
таблицу 6.1.
Мощность освещения равна:
Р∑ = 273 · 40 + 4 · 100 + 4 · 2
· 75 = 11920Вт = 11,92кВт.
Таблица 6.1 -
Данные расчета освещения
|
Помещение
|
Кол-во
|
Марка
светильника
|
Марка
лампы
|
Р
лампы, Вт
|
Кол-во
ламп
|
Р
ламп, Вт
|
|
Помещение
для птиц
|
1
|
НСП-02
|
БК220-230-40
|
40
|
273
|
1560
|
|
Коридор
|
2
|
НСП-02
|
Б215
- 225 - 100
|
100
|
2
|
200
|
|
Инвентарная
|
1
|
НСП-02
|
Б215
- 225 - 100
|
100
|
1
|
100
|
|
Уборная
|
1
|
НСП-02
|
Б215
- 225 - 100
|
100
|
1
|
100
|
|
Операторская
|
1
|
НСП-02
|
БК215
- 225 - 75
|
75
|
2
|
150
|
|
Вентиляционная
камера
|
3
|
НСП-02
|
БК215
- 225 - 75
|
75
|
6
|
450
|
Дежурное освещение составляет 10% от всего
освещения. На дежурное освещение приходится по 4 лампы из каждого ряда и две
лампы двух коридоров, т.е. дежурное освещение составляет 30 ламп, общей
мощностью:деж=28 · 40 + 2 · 100 = 1320 Вт.
Выбираем щиток освещения ОЩ - 12 устанавливаем
12 автоматов:
· 1 автомат - резерв;
· 1 автомат - дежурное освещение;
· 7 автоматов на 7 рядов освещения;
· 1 автомат на подсобные помещения.
Выбираем автоматы для освещения.
Выбираем автомат для 1 ряда освещения.
Рр. = 1560 Вт.н = 1560 /
220 = 7,1 А.
Определяем ток теплового расцепителя:
нр
≥ kнтIн, [7, 58]
где kнт - коэффициент надежности.
Учитывающий разброс по току срабатывания
теплового расцепителя (1,1…1,3), kнт=1,2.нр ≥ 1,2 ·
7,1 = 8,5 А.
Принимаем к установки автомат: А - 63 с Iн
= 25 А, Iнр = 10 А.
Ток установки расцепителя:ур = 0,9 ·
10 = 9 А.
Для остальных групп освещения автоматические
включатели выбираем аналогично, данные заносим в таблицу 6.2.
Расчет проводов для групп освещения. Провода
выбирают таким образом, чтобы допустимая потеря напряжения не превышала
установленную допустимую. Выбираем марку и сечение провода питания
осветительной сети. По правилам установки электрооборудования в сельском
хозяйстве не рекомендуется использовать провода и кабели с площадью сечения
токоведущей жилы менее 2,5 мм2.
Выбираем провод от распределительного пункта до
щитка освещения.
Длина провода 5 м.
Выбираем 3-х жильный провод ПВ, способ прокладки
в трубе:доп ≥ 1,25 · 54,2 = 67,7 А.
Выбираем провод ПВ 4×16
с
площадью токоведущей жилы F = 16 мм2 и длительно допустимым током 80
А.
Расчет по допустимой потере напряжения:
∆U < ∆Uдоп = 2,5%.
∆U = Pl/(CF),
где 0,04% < 2,5%; P - мощность освещения, Р =
11,92 кВт; l - длина провода, l = 5 м; C - постоянный для данного провода
коэффициент, С = 77 [7, табл. 12.3]; F - площадь сечения токоведущей жилы, F =
16 мм2.
∆U = 11,92 · 5 / (77 · 16) = 0,04%.
Для остального оборудования провода выбирают
аналогично, и данные заносят в сводную таблицу 6.2.
Таблица 6.2 -
Сводная таблица осветительной аппаратуры
|
Группа
|
Р,
КВт
|
Марка
провода
|
lпр,
м
|
Iдоп,
А
|
∆U,
%
|
Автомат
|
|
1ряд
|
1,56
|
ПВ2×2.5
|
98
|
25
|
0,79
|
А
- 63, Iнр=8А
|
|
2ряд
|
1,56
|
ПВ2×2.5
|
98
|
25
|
0,79
|
А
- 63, Iнр=8А
|
|
3ряд
|
1,56
|
ПВ2×2.5
|
98
|
25
|
0,79
|
А
- 63, Iнр=8А
|
|
4ряд
|
1,56
|
ПВ2×2.5
|
98
|
25
|
0,79
|
А
- 63, Iнр=8А
|
|
5ряд
|
1,56
|
98
|
25
|
0,79
|
А
- 63, Iнр=8А
|
|
6ряд
|
1,56
|
ПВ2×2.5
|
98
|
25
|
0,79
|
А
- 63, Iнр=8А
|
|
7ряд
|
1,56
|
ПВ2×2.5
|
103
|
25
|
0,83
|
А
- 63, Iнр=8А
|
|
Подсоб.
помещение
|
1,00
|
ПВ2×2.5
|
126
|
25
|
0,65
|
А
- 63, Iнр=6А
|
В качестве резерва устанавливаем автоматический
выключатель А - 63 с; Iн = 25 А, Iнр = 8 А.
7. Расчет силовой сети
.1 Расчет силовых проводок
Провода выбирают таким образом, чтобы допустимая
потеря напряжения не превышала установлено допустимую. Выбираем марку и сечение
провода питания электродвигателя цепного транспортера от трех фазной сети. По
правилам установки электрооборудования в сельском хозяйстве не рекомендуется
использовать провода и кабели с площадью сечения токоведущей жилы менее 2,5 мм2.Выбираем
3 - х жильный провод ПВ, способ прокладки - в трубе. Выбираем провод для
кормораздатчика.
Длина провода 6 м.
Определяем предельно допустимый ток:доп
≥ 1,25 · 4,38 = 5,5 А (по условию выбора автоматического выключателя).
Выбираем провод ПВ 3×2.5
с
площадью токоведущей жилы F = 2,5 мм2 и допустимый ток 25 А.
Расчет по допустимой потере напряжения:
∆U = 3 · 6 / (77 · 2,5) = 0,09%.
Для остального оборудования провода выбирают
аналогично, и данные заносят в сводную таблицу 7.1.
В установке СФОЦ - 100/0.5Т для ТЭНов выбираем
3-х жильный кабель РПГ3×70, сечение
токоведущей жилы F = 70 мм2 и длительно допустимым током Iдоп
= 180 А. Для вентилятора провод ПВ4×2.5С,
F = 1,5 мм2, Iдоп = 25 А.
Проверяем на допустимые потери напряжения ∆U.
Таблица 7.1 - Сводная таблица результата выбора
силовых проводок
|
Установка
|
Тип
двигателя
|
Р,
кВт
|
Провод
|
Lпр,
м
|
Iдоп,
А
|
∆U,
%
|
Автомат
предохр.
|
|
Цепной
транспортер:
|
|
1
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
6
|
25
|
0,09
|
АЕ2036Р
|
|
2
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
7,5
|
25
|
0,19
|
АЕ2036Р
|
|
3
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
9
|
25
|
0,23
|
АЕ2036Р
|
|
4
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
10,5
|
25
|
0,27
|
АЕ2036Р
|
|
5
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
12
|
25
|
0,31
|
АЕ2036Р
|
|
6
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
13,5
|
25
|
0,35
|
АЕ2036Р
|
|
Шнеков.
Транспортер
|
4А90L6УЗ
|
1,5
|
ПВ4×2.5
|
8,5
|
25
|
0,11
|
АЕ2036Р
|
|
Тр-р.
кормозагрузки
|
4А90L6УЗ
|
1,5
|
ПВ4×2.5
|
25
|
25
|
0,32
|
АЕ2036Р
|
|
Тр-р.
горизонтальный
|
4А90L6УЗ
|
1,5
|
ПВ4×2.5
|
92
|
25
|
1,20
|
АЕ2036Р
|
|
Тр-р.
наклонный
|
4А90L6УЗ
|
1,5
|
ПВ4×2.5
|
107
|
25
|
1,39
|
АЕ2036Р
|
|
1
скреперный тр-р.
|
4А90L6УЗ
|
1,5
|
ПВ4×2.5
|
95
|
25
|
1,24
|
АЕ2036Р
|
|
2
скреперный тр-р.
|
4А90L6УЗ
|
1,5
|
ПВ4×2.5
|
98
|
25
|
1,28
|
АЕ2036Р
|
|
3
скреперный тр-р.
|
4А90L6УЗ
|
1,5
|
ПВ4×2.5
|
101
|
25
|
1,31
|
АЕ2036Р
|
|
Тр-р.
уборки помета из клеток:
|
|
1
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
102
|
25
|
1,57
|
АЕ2036Р
|
|
2
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
103,5
|
25
|
1,61
|
АЕ2036Р
|
|
3
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
105
|
25
|
1,65
|
АЕ2036Р
|
|
4
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
106,5
|
25
|
1,69
|
АЕ2036Р
|
|
5
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
108
|
25
|
1,73
|
АЕ2036Р
|
|
6
батарея
|
4А100S4УЗ
|
3
|
ПВ4×2.5
|
109,5
|
25
|
1,77
|
АЕ2036Р
|
|
СФОЦ
-100/0.5Т:
|
|
ТЭНы
|
|
90
|
РПГ4×16
|
21
|
75
|
0,82
|
ПП31
- 33
|
|
вентилятор
|
Да112М4С
|
4
|
ПВ4×2.5
|
7
|
25
|
0,24
|
АЕ2036Р
|
|
СФОЦ
-60/0.5Т:
|
|
ТЭНы
|
|
67,5
|
РПГ4×35
|
100
|
115
|
1,98
|
НПР-100
|
|
вентилятор
|
Да90М4С
|
1,5
|
ПВ4×2.5
|
7
|
25
|
0,46
|
АЕ2036Р
|
|
СФОЦ
-100/0.5Т:
|
|
ТЭНы
|
|
90
|
РПГ3×70
|
117
|
180
|
2,27
|
ПП31
- 33
|
|
вентилятор
|
Да112М4С
|
4
|
ПВ4×2.5
|
7
|
25
|
0,24
|
АЕ2036Р
|
|
1
вентилятор ВО-5
|
4АА63В2У3
|
0,37
|
ПВ4×2.5
|
20
|
25
|
0,06
|
АЕ2036Р
|
|
2
вентилятор ВО-5
|
4АА63В2У3
|
0,37
|
ПВ4×2.5
|
23
|
25
|
0,07
|
АЕ2036Р
|
|
3
вентилятор ВО-5
|
4АА63В2У3
|
0,37
|
ПВ4×2.5
|
26
|
25
|
0,08
|
АЕ2036Р
|
|
4
вентилятор ВО-5
|
4АА63В2У3
|
0,37
|
ПВ4×2.5
|
103
|
25
|
0,33
|
АЕ2036Р
|
|
5
вентилятор ВО-5
|
4АА63В2У3
|
0,37
|
ПВ4×2.5
|
106
|
25
|
0,34
|
АЕ2036Р
|
|
6
вентилятор ВО-5
|
4АА63В2У3
|
0,37
|
ПВ4×2.5
|
120
|
25
|
0,39
|
АЕ2036Р
|
|
7
вентилятор ВО-5
|
4АА63В2УЗ
|
0,37
|
ПВ4х2,5
|
123
|
25
|
0,40
|
АЕ2036Р
|
∆U = 90 · 21 / (77 · 70) = 0,35%;
,35% < 2,5%
Для других установок СФОЦ выбор проводов и
кабелей аналогичен.
.2 Расчет ПЗА
Электрическими аппаратами пуска, управления и
защиты называют электротехнические устройства и механизмы, предназначенные для
включения и отключения, обеспечения определенного режима работы и для защиты
электроприемников и электрических цепей. Аппарат может выполнять одну или
несколько из указанных функций.
Для включения и отключения электроприемников и
электрических цепей и управления ими служат рубильники, пакетные выключатели,
пакетно-кулачковые предохранители, контакторы, магнитные пускатели и
автоматические выключатели. Магнитные пускатели и автоматические выключатели
выполняют также функции защиты электроприемников и электрических цепей.
Аппараты защиты являются также предохранители.
Выбор электрических аппаратов проводят по роду
тока, напряжению мощности, числу полюсов, условиям электрической защиты от
ненормальных режимов работы электроприемников и электрических цепей и по
исполнению в зависимости от окружающей среды.
Все электроустановки должны быть защищены от
токов короткого замыкания.
Электрические двигатели требуют также защиты от
перегрузки, произвольного срабатывания, работы при пониженном напряжении и от
токов неполнофазных режимов работы. Аппараты защиты должны практически
мгновенно отключать токи короткого замыкания и не срабатывать при пусковом токе
нормальной продолжительности.
Для защиты электродвигателей следует применять
автоматические выключатели, плавкие предохранители используют в основном для
защиты электрических сетей, тепловых и осветительных электроустановок.
Произведем выбор автоматических выключателей для
двигателей транспортеров:
Выбираем автомат для цепного транспортера.
Определяем максимальный рабочий ток:
рmax=
kзIн,
где kз - коэффициент загрузки, kз
= 0,5; Iн - номинальный ток двигателя, Iн = 7,3 А.рmax=
0,5 · 7,3 = 3,65 А.
Определяем пусковой ток:
п
= kiIн, [7, 5.5]
где ki - кратность пускового тока, ki
= 6.п = 6 · 7,3 = 43,8 А,
Определяем расчетный ток теплового расцепителя:
Iнр = kнтIрmax,
[7, 5.8]
где kнт - коэффициент надежности,
учитывающий разброс по току срабатывания теплового расцепителя (1,1…1,3), kнт
= 1,2.
Iнр = 1,2 · 3,65= 4,38 А.
Принимаем автомат АЕ - 2036 Р с Iн =
25 А, Iнр = 5 А.
Определяем ток установки расцепителя:у.р.
= 0,9 · 5 = 4,5 А.
Ток срабатывания электромагнитного расцепителя
выбираем по условию:нэ ≥ 1,25 · 43,8 = 54,8 А.
Принимаем Iнэ = 12 · 5 = 60 А, так
как 60 > 54,8 ложных срабатываний не будет.
Для остальных электродвигателей выбор
автоматических выключателей проводится аналогично, данные занесены в таблицу
7.2.
Выбираем пускатели для двигателей транспортеров:
Пускатели выбирают в зависимости от условий
окружающей среды и схемы управления, по номинальному напряжению (Uнп
≥ Uну), номинальному току (Iнп ≥ Iур)
и по напряжению втягивания катушки.
Для цепного транспортера выбираем пускатель ПМЕ
с Рн = 4 кВт, IР - 40, без кнопок, тип теплового реле ТРН - 10, Iн
реле = 10 А, Iтэл = 8 А.
Для других двигателей выбор аналогичен, данные
занесены в таблицу 7.2.
Таблица 7.2 -
Аппаратура управления и защиты
|
Двигатель
|
Рн,
кВт
|
Iн,
А
|
Кол-во
|
Автомат
|
Iн,
А
|
Iнр,
А
|
Пускатель
|
Рн,
кВт
|
Тип
теплового реле
|
Iн
реле, А
|
Iтэл,
А
|
|
4А90L6У3
|
1,5
|
4
|
АЕ2036Р
|
25
|
2,5
|
ПМЕ-122
|
4
|
ТРН-10
|
10
|
5
|
|
4А100S4У3
|
3
|
7,3
|
15
|
АЕ2036Р
|
25
|
5
|
ПМЕ-122
|
4
|
ТРН-10
|
10
|
8
|
8. Расчет мощности привода
Для того чтобы запитать полностью все
электрооборудование в птичнике необходимо рассчитать и выбрать вводное
устройство и кабель.
Для этого определяют полную расчетную мощность
на вводе по формуле:
расч
= Рр/cosφ, [7, 126]
где Рр - расчетная активная мощность;
cosφ
- коэффициент
мощности на вводе при максимальной нагрузке.
Рр =  (Рнkз/η)
+
(Рнkз/η)
+  (Р/нtkз//(0,5η)),
[7, 127]
(Р/нtkз//(0,5η)),
[7, 127]
где Рн - номинальная мощность каждого
из n электроприемников, участвующих в максимуме нагрузок в течение времени
более 0,5 ч, кВт; kз - коэффициент загрузки электроприемника; η
- КПД
электроприемника; n - число электроприемников, участвующих в максимуме нагрузок
в течение времени с продолжительностью 0,5 ч и более; Р/н
- номинальная мощность каждого из m электроприемников, участвующих в максимуме
нагрузок в течении времени менее 0,5 ч; t - длительность непрерывной работы
каждого из электроприемников при t<0,5 ч; m - число электроприемников
участвующих в максимуме нагрузок с продолжительностью менее 0,5 ч.
Рассчитываем Ррк кормораздатчика:
Ррк = 3 · 0,7 / 0,83 = 2,5 кВт, а так
как у нас 6 кормораздатчиков, то Р∑рк для всех составит Р∑рк
= 6Ррк = 6 · 2,5 = 15 кВт.
Рассчитываем Ррш для шнекового
транспортера:
Ррш = 1,5 · 0,4 / 0,75 = 0,8 кВт.
Рассчитываем Ррз транспортера
загрузки:
Ррз = 1,5 · 0,7 / 0,75 = 1,4 кВт.
Рассчитываем Ррв вентиляторов:
Ррв = 0,37 · 0,7 / 0,65 = 0,4 кВт,
так как у нас имеется 7 вентиляторов, то расчетная мощность Р∑рв
всех вентиляторов:
Р∑рв = 0,4 · 7 = 2,8 кВт.
Рассчитываем Ррткф ТЭНов калориферных
установок:
Рркф = 2 · 90 + 60 = 240 кВт.
Рассчитываем Ррвкф вентиляторов в
калориферных установках:
Ррвкф = 2·(4 · 0,7/ 0,83) + 7,5 ·
0,7/ 0,86 = 6,7 + 6,1 = 12,8 кВт.
Расчетная мощность освещения:
Ррос = 11,92 кВт.
Рассчитываем Ррг горизонтального
транспортера:
Ррг = 1,5 · 0,3 · 0,7 / (0,5 · 0,75)
= 0,84 кВт.
Рассчитываем Ррн наклонного
транспортера:
Ррн = 1,5 · 0,3 · 0,7 / (0,5 · 0,75)
= 0,84 кВт.
Рассчитываем Руп транспортера уборки
помета из клеток:
Руп = 3 · 0,3 · 0,7 / (0,5 · 0,75) =
1,68 кВт, так как у нас 6 транспортеров уборки помета из клеток то суммарная
мощность Р∑уп равна:
Р∑уп = 6 · 1,68 = 10,08 кВт.
Рассчитываем Ррс скреперного
транспортера:
Ррс = 3 · 0,3 · 0,7 / (0,5 · 0,83) =
1,5 кВт, так как у нас 3 скреперных транспортера то суммарная мощность Р∑р
транспортеров:
Р∑рс = 3 · 1,5 = 4,5 кВт.
Рр=15+0,8+1,4+2,8+240+12,8+11,92+0,84+0,84+10,08+4,5=301
кВт.
Так как мощность калорифера составляет 80% от
всей расчетной мощности, то cosφ определяют
в зависимости от отношения Рркф / Рр [7, 129]:
Если Рркф / Рр = 240 / 301
= 0,80, то cosφ = 0,98.
Sрасч = 301 / 0,98 = 307кВА.
Выбираем распределительный пункт ПД9000 с
размерами 1275×785×270.
Определяем номинальный ток на вводе:
н
= S /  Uн.
Uн.
н
= 307000 / (1,7 · 380) = 475 А.
Определяем ток теплового расцепителя:нр
= 1,2 · 475 = 570 А.
Принимаем автоматический выключатель А3744Б с Iн=630А,
Iнр=630А.
Кабель от подстанции до распределительного
пункта: Iдоп =475 А.
Выбираем кабель марки ВББШВ 3 ×
185+1×150 мм² четырехжильный:=
185; Iд = 560 А; L=55м, где L - длина кабеля; S=70мм2,
где S - площадь сечения кабеля.
Принимаем стандартную площадь сечения кабеля  .
.
 .
.
 .
.
Тогда:
 .
.
 .p=630
А; Кэм=7.ут= 630×7=4,41 кА.
.p=630
А; Кэм=7.ут= 630×7=4,41 кА.
Для учета потребления электроэнергии выбираем
счетчик электрической энергии ЦЭ6805В, который является трехфазным,
трансформаторным, универсальным и предназначен для измерения активной
электрической энергии в трехфазных цепях переменного тока. Счетчик устойчив к
нагреву и огню. Зажимная плата, крышка зажимов и корпус счетчика обеспечивают
безопасность от распространения огня. Они не воспламеняются при тепловой
нагрузке находящихся под напряжением частей при контакте с ними. Счетчик
защищен от проникновения пыли и воды. Степень защиты счетчика IP51 по ГОСТ
14254. средняя наработка до отказа счетчика с учетом технического обслуживания,
регламентируемого в паспорте должна быть не менее 35000 ч. Средний срок службы
до первого капитального ремонта счетчика 24 года. Счетный механизм счетчика с
электронной индикацией выполнен на жидкокристаллическом индикаторе, на котором
отображается электроэнергия в киловатт часах нарастающим итогом. Для
отображения режимов работы счетчика ЦЭ6805В на панель выведены два светодиодных
индикатора, отображающих информацию:
· правый светодиодный индикатор СЕТЬ сигнализирует
о включении счетчика в сеть.
· левый индикатор работает с частотой
основного передающего устройства и сигнализирует о регистрации активной энергии
прямого направления.
Схема включения счетчика ЦЭ6805В показана на
рисунке 8.1.
 Рисунок 8.1 -
Схема включения счетчика ЦЭ6805В
Рисунок 8.1 -
Схема включения счетчика ЦЭ6805В
Рассчитываем среднесуточное потребление
электроэнергии Wсут.:
=
Р · t,
где Р - мощность электрооборудования, кВт; t -
время работы электрооборудования в сутки, ч.
Рассчитываем суточное потребление электроэнергии
Wкз кормозагрузки:кз = (1,5 + 1,5) · 0,6 = 1,8 кВ·ч.
Рассчитываем суточное потребление электроэнергии
Wкр кормораздачи:кр = 6 · 3 · 0,6 = 10,8 кВ·ч.
Рассчитываем суточное потребление электроэнергии
Wуп уборки помета:уп = (6 · 3 + 3 · 1,5 + 1,5 + 1,5) ·
0,3 = 7,65 кВ·ч.
Рассчитываем суточное потребление электроэнергии
Wос освещением:ос = 11,92 · 14 = 166,88 кВ·ч.
Рассчитываем суточное потребление электроэнергии
Wот отопления:кз = (2 · 94 + 67,5) · 6 = 1533 кВ·ч.сут
= ∑W = 1,8 + 10,8 + 7,65 + 166,88 + 1533 = 1720,13 кВт·ч.
Среднегодовое потребление электроэнергии Wг:
г
= W · D,
где D - число дней работы оборудования.г
= (1,8 + 10,8 + 7,65 + 166,88) · 335 + 1533 · 137 = 327897,55 кВт·ч.
9. Разработка специальной части
дипломного проекта
.1 Задачи спецвопроса
На пищевых предприятиях широко применяются
локальные системы автоматизации аппаратов, агрегатов, установок, механизмов,
машин, линий, реализующих для части технологического процесса функции
автоматического контроля и сигнализации, автоматического регулирования,
автоматического пуска и остановки технологического оборудования, автоматической
защиты.
Автоматический контроль и сигнализация
предназначены для выполнения непрерывного или достаточно частого измерения,
записи ряда величин, характеризующих состояние и работу технологического
оборудования, а также подачи предупредительных сигналов при отклонении этих
величин от допустимых пределов.
Автоматическое регулирование поддерживает
постоянство или закономерное изменение регулируемых величин, обеспечивающих
безопасность, надежность и наивысшую эффективность эксплуатации
технологического оборудования.
Автоматический пуск и остановка обеспечивают
запуск в действие сложного технологического оборудования по одному сигналу из
пункта управления или даже без такового, но при наличии определенной
совокупности внешних условий. При этом соблюдаются последовательность операций
и координация их между собой.
Автоматическая защита предохраняет действующее
оборудование от аварий. Она выводит из действия все технологическое
оборудование или его часть, которой непосредственно грозит авария из-за
неисправности автоматизированного оборудования, порчи регуляторов или
неправильных действий обслуживающего персонала. К автоматической защите
относятся также устройства блокировки, допускающие выполнение операций по
включению в действие или по отключению элементов оборудования только в заданной
последовательности.
Структура и характер автоматизации
технологического процесса определяются схемой автоматизации. На ней условными
изображениями показывают технологическое оборудование и коммуникации с
применяемыми органами управления, устройства контроля и сигнализации,
регулирования, защиты, пуска и остановки механизмов, а также условные линии
связи между оборудованием и всеми перечисленными устройствами автоматики.
Взаимосвязь взаимодействие между отдельными
элементами систем и способы электропитания приборов и средств автоматизации
отображаются на принципиальных электрических схемах.
Принципиальные электрические схемы
разрабатываются на основании решений принятых в схемах автоматизации. От
качества их разработки в большей степени зависят такие факторы
производительность автоматизируемого оборудования, соответствие систем
автоматического регулирования и управления требованиям технологического
процесса, надежность действия, простота эксплуатации.
Принципиальные электрические схемы составляются
обычно для участков автоматизируемой системы.
Одним из требований, которым должны
удовлетворять электрические схемы управления, является обеспечение заданных
режимов работы. В электрических схемах возможность выбора заданных режимов
управления достигается при помощи узлов выбора режима, являющихся составной
частью схем управления и регулирования.
В зависимости от степени участия оператора в
процессе управления различают следующие режимы:
· автоматического управления - автоматический
режим, при котором управление производится без участия оператора, но под его
контролем и по его заданию;
· полуавтоматического управления -
полуавтоматический режим (его часто называют режимом автоматизированного
управления), при котором в отличие от режима автоматического управления
осуществление основных командных операций по управлению (пуск, остановка,
изменение режима работы оборудования и т. п.) возлагается на оператора;
· ручного управления - ручной режим,
при котором все операции по управлению осуществляются оператором.
Автоматическое, полуавтоматическое и ручное
управления, основным содержанием которых является обеспечение определенных
порядка и последовательности пуска, работы и остановки механизмов, участвующих
в процессе, достигаются путем введения соответствующих блокировок. В
зависимости от места расположения командной аппаратуры управление в
полуавтоматическом и ручном режимах может быть местным), командные аппараты
устанавливаются не посредственно у оборудования либо дистанционным. Местное
управление необходимо для ввода системы в автоматический режим для проведения
ремонтных, проверочных и наладочных работ. При этом блокировочные связи и
сигнализация, безусловно необходимые для защиты устройства, должны быть
сохранены в местном режиме.
При выборе режимов работы автоматизированного
оборудования встречаются и более сложные случаи. Так, в случае, когда при
автоматическом управлении из двух аналогичных агрегатов всегда работает один, а
второй является резервным, для каждого из агрегатов предусматриваются следующие
режимы работы: автоматический рабочий, автоматический резервный, ручной
ремонтный.
Успешное решение проблем автоматизации
технологических процессов связано с применением ЭВМ и микропроцессорной
техники. Требования, диктуемые применением вычислительной техники, изменяют
характер подготовки описания технологического процесса и выдвигают
необходимость представления его в виде алгоритма. Алгоритм - это система правил,
следуя которой можно разрешить определенную математическую задачу, производя
необходимые операции в строго определенной последовательности.
Разработка алгоритмов осуществляется на основе
государственных стандартов и нормативно-технических документов, регламентирующих
состав, содержание и оформление документации. Основной формой представления
типовых проектных решений является алгоритмический модуль, являющийся
комплектом документов типового алгоритма решения частной задачи (класса задач).
Классификация алгоритмических модулей (AM)
осуществляется по признакам, основными из которых являются сложность структуры
алгоритма; тип алгоритма, определяющий ориентацию AM на разработчиков разных
частей АСУ ТП; функциональное назначение.
По сложности структуры AM делятся на простые
модули и алгоритмические комплексы (АК), включающие в себя другие AM или АК.
Автоматический контроль и
сигнализация. При разработке систем
автоматизации технологические процессы необходимо представлять в виде объектов
управления, используя известные методы теории автоматического управления.
Общность этих методов позволяет создавать системы управления для
технологических процессов разной природы по единым принципам, учитывая
конкретные особенности этих объектов только при разработке способов получения
информации с объекта (установке измерительных датчиков) и вводе управляющих
воздействий в объект (установке исполнительных механизмов).
Таким образом, множество разнохарактерных типов
технологических процессов и оборудования, возникшее и развивающееся в пищевой
промышленности в связи с производством большого ассортимента продуктов,
представляют ограниченным перечнем типовых объектов управления. В самом общем
виде объект управления - это система, рассматриваемая как комплекс динамически
связанных элементов. В соответствии с принятой для технологических процессов
терминологией технологический объект управления - это совокупность технических
средств (агрегаты, механизмы, аппараты и т. д.), которая нуждается в оказании
специально организованных воздействий для достижения желаемых результатов
функционирования.
Современный технологический процесс в
большинстве случаев представляется как многомерный объект на входе, которого
действует векторная переменная X(t) с составляющими Xi(t),..., xn(t).
Эти составляющие представляют собой показатели свойств сырья, поступающего на
переработку, учитывающие его химический состав, механические свойства, скорость
подачи, стоимость и так далее. Параметры, представляющие собой характеристики
протекания технологического процесса, отражают температуру, давление, расход,
производительность и т. д., являются переменными fi(t),..., fn(t)
векторной функции F(t). Характеристики полученного продукта или полупродукта
представляют собой выходные переменные y\(t),..., yn(t) векторной переменной
Y(t). К ним относятся количество, состав, стоимость и другие выходные
показатели.
Рис. 9.1 -
Параметрическая схема многомерного процесса
Для реальных технологических процессов число
составляющих векторных функций X(t), F(t) и Y (t) велико и не все они могут
быть измерены. Поэтому при контроле и управлении технологическим процессом
векторные функции X(t), F(t) и Y(t) рассматриваются как случайные.
При общем рассмотрении нет необходимости
разделять переменные X(t) и F(t), потому что и те и другие могут
рассматриваться как причины и их влияние сказывается на Y(t), причем часть из
них может быть управляющими величинами. Таким образом, параметрическая схема
многомерного технологического процесса примет вид, показанный на рис. 1.4. При
этом на входе технологического процесса действует случайная векторная функция
X(t) = {xi(t),..., xn(t)}, включающая как измеряемые, так и не
измеряемые входные переменные. Некоторые из них являются управляющими и могут
относиться как к характеристикам сырья, так и к параметрам самого
технологического процесса. Выход представлен случайной векторной функцией
Из примера следует, что технологические процессы
относятся к системам с неполной априорной информацией. Выбор переменных
определяется не только их взаимосвязью, а и возможностью их измерения и
преобразования информации.
Параметры определяются и контролируются
технологическими измерениями с помощью приборов, состоящих из первичного
преобразователя, канала связи и вторичного прибора. В случаях, когда локальные
системы автоматизации одновременно являются составной частью комплекса
технических средств АСУ ТП, особое место занимают средства систем сбора,
передачи и отображения информации. Эти системы включают измерительные датчики
параметров технологического процесса, вырабатывающие электрические,
пневматические выходные сигналы, а также функциональные преобразователи для
получения унифицированных сигналов, обеспечивающих непосредственный ввод в ЭВМ.
На вход ЭВМ может передаваться информация сигналами
низкого уровня (0-100 мВ) от термопреобразователей и потенциометров и сигналами
высокого уровня (0-5 В; 0-10 В; 0- 5 мА; 0-20 мА; 0-100 мА) от измерительных
датчиков. Унификация сигналов, поступающих на вход ЭВМ, осуществляется с
помощью измерительных и нормирующих преобразователей, выпускаемых серийно
отечественной промышленностью.
Выходная информация для контроля и управления
технологическим процессом после обработки на ЭВМ формируется в виде цифровых
кодов. Поэтому в зависимости от вида применяемых исполнительных устройств и
регуляторов необходимо преобразовывать выходные сигналы ЭВМ в унифицированные
электрические или пневматические сигналы. Для этого также применяют
соответствующие преобразователи.
Таким образом, средства локальной автоматизации
обеспечивают ввод в ЭВМ измерительной и цифровой информации в составе системы
передачи, включающей коммутатор аналоговых сигналов, аналого-цифровой
преобразователь, коммутатор цифровых сигналов и устройство приема цифровых
сигналов. В свою очередь, система передачи информации от ЭВМ включает
коммутатор цифровых сигналов контроля и управления и цифро-аналоговые
преобразователи.
Наряду с указанными функциями средства локальной
автоматизации обеспечивают работу системы отображения позволяющей оператору
осуществлять контроль над ходом технологического процесса и использовать
«советы» ЭВМ для выбора режима управления. Особенностью использования ЭВМ
является необходимость разработки алгоритма решения задачи. На его основе
составляется машинная программа, являющаяся описанием алгоритма решения задачи
на языке машины.
Автоматическое регулирование.
В соответствии с принятой терминологией автоматическое регулирование
представляет собой разновидность автоматического управления, задачей которого
является поддержание постоянной некоторой величины (параметра), характеризующей
процесс, или изменение ее по заданному закону. Последнее осуществляется с
помощью контроля (измерения) состояния объекта и формирования воздействий,
обеспечивающих требуемый режим работы объекта управления.
В круг задач автоматического регулирования не
входят, например, адаптация (или самонастройка), формирование оптимальных
управляющих воздействий и автоматический выбор наилучших режимов из нескольких
возможных (поскольку они относятся к задачам управления).
Совокупность объекта управления и
автоматического регулятора, взаимодействующих между собой в соответствии с
алгоритмом управления, называют системой автоматического регулирования.
Многочисленные исследования типовых
технологических процессов (процессы тепло - и массообмена, ферментации,
стерилизации, варки, сушки, многокомпонентного дозирования, перекачивания
жидких продуктов и т. п.) в разных пищевых производствах позволили создать
рациональные системы автоматического регулирования и управления.
Технологические требования к системе
автоматического регулирования для этих объектов сводятся к ограничениям
величины допустимых отклонений параметров от их номинальных либо заданных
значений, а также продолжительности процесса регулирования, представляющего
собой время, за которое регулируемая величина возвращается после возмущающих
воздействий к заданному значению. Кроме того, обычно формируются требования к
системе автоматического регулирования, связанные с характеристикой
технологической среды.
Для оценки качества регулирования в переходных
режимах чаще всего применяют величину среднеквадратичного отклонения
В настоящее время наряду с развитием работ по
использованию вычислительной техники для автоматизации технологических
процессов в целом совершенствуются также технические средства локальной
автоматизации.
Для решения задач автоматического регулирования
технологических процессов получил применение новый класс устройств управления,
выполненных на микропроцессорной элементной базе, - регулирующие микропроцессорные
контроллеры (реми-конт). Для синтеза системы непосредственно цифрового
регулирования необходимо использование соответствующего алгоритма. Рассмотрим
пример разработки алгоритма регулирования в одноконтурной системе.
Назначение алгоритма: реализация в
автоматическом режиме одного из стандартных (ПИД, ПИ, ПД, П, И) законов
регулирования в одноконтурной системе с одним контролируемым параметром,
характеризующим технологический процесс. Алгоритм позволяет также осуществить
безударный переход из ручного режима управления в автоматический.
Автоматический пуск и остановка
оборудования. Непрерывное развитие
технологических процессов сопровождается усложнением управления оборудованием.
При этом особенно возрастает число логических операций, которые необходимо
выполнить при управлении процессом. Поэтому решение задач управления приходится
сочетать с целым рядом операций переключения.
Управление технологическим процессом
переключательного типа называют логическим. В пищевой технологии существует три
характерных класса производственных задач, решение которых требует выполнения
определенной последовательности логических переключательных операций:
· совместная работа однотипного оборудования
(например, согласование циклов работы отдельных аппаратов, работающих параллельно
на один коллектор в разных пищевых производствах, в частности замена
оборудования при выводе аппаратов на регенерацию и в резерв);
· пуск и остановка оборудования,
оптимальные по времени и эксплуатационным затратам (например, пуск агрегатов
рушально-веечного отделения маслоэкстракционного завода);
· защита оборудования при
возникновении аварийных ситуаций в ходе эксплуатации (например, обеспечение
противозавалов при остановке какого-либо механизма элеватора или других
поточно-транспортных систем).
Основными в реализации перечисленных задач
являются аппаратурные способы создания соответствующих систем. Однако в
некоторых случаях экономически более выгодна реализация логических алгоритмов
переключательного типа программным способом с использованием ЭВМ. Рассмотрим
алгоритм логического управления технологическим оборудованием.
Назначение алгоритма: управление работой
(включение/выключение) и контроль состояния технологического оборудования,
составляющего последовательную цепь без разветвлений (например, поточно-транспортная
линия).
Каждый элемент цепи снабжен датчиком,
характеризующим состояние оборудования (работает/не работает), и исполнительным
механизмом для включения и выключения.
Контроль состояния выполняется периодически с
заданной частотой. Управление осуществляется по инициативному сигналу «включить
цепь» (режим включения), или по сигналу «останов i-го элемента цепи» (режим
останова), либо при обнаружении в процессе контроля останова одного из
элементов цепи.
При поступлении сигнала «включить цепь» должен
быть осуществлен запуск всех неработающих элементов цепи в заданной
последовательности с заданными временными сдвигами.
При поступлении сигнала «останов i-го элемента»
или обнаружении такого останова в процессе контроля должна быть приостановлена
работа элементов цепи, предшествующих остановившемуся элементу и следующих
после него. При этом каждому элементу цепи ставятся в соответствие
последовательность выключения остальных элементов и необходимые времен сдвиги.
Допускается, что часть элементов цепи может продолжать работать.
Первоначально проверяется режим выполнения
алгоритма: включение, останов или контроль.
В режиме включения проверяется, есть ли в цепи
неработающие элементы; для них формируется список, определяющий
последовательность и временные сдвиги включения; в соответствии с этим списком
выводятся сигналы исполнительным механизмам на включение. Если же все элементы
цепи работают, то требование «включить цепь» было ложным и никакие действия
производить не надо.
В режиме останова проверяется, есть ли в цепи
работающие элементы; определяется, от какого элемента цепи поступил сигнал
«останов»; для этого элемента формируется список, задающий перечень,
последовательность и временные сдвиги выключения элементов цепи, и в
соответствии с этим списком выводятся сигналы исполнительным механизмом на
выключение.
В режиме контроля осуществляется опрос всех
датчиков состояния оборудования, анализируются результаты опроса и, если
обнаруживается остановившийся элемент, выполняются действия для останова всей
цепи.
Выполнение алгоритма завершается запоминанием
состояния цепи. При разработке схем автоматического управления
переключательного типа широко используют комплектные устройства управления. К
ним относятся, в частности, станции управления электродвигателями разных типов
и комплектные регулируемые приводы, в основу которых положены типовые схемы
управления электродвигателями.
На предприятиях перерабатывающей отрасли
наиболее широко применяются короткозамкнутые асинхронные электродвигатели
вследствие простоты конструкции, простоты эксплуатации и дешевизны. Поэтому на
практике чаще всего встречаются следующие схемы:
. Управления нереверсивными асинхронными
электродвигателями с короткозамкнутым ротором при прямом пуске от полного
напряжения сети.
. Управления реверсивными асинхронными
электродвигателями с короткозамкнутым ротором при прямом пуске от полного
напряжения сети.
. Управления многоскоростными асинхронными
электродвигателями с непосредственным подключением к сети.
. Управления нереверсивными асинхронными
электродвигателями с фазовым ротором.
. Управления реверсивными асинхронными
электродвигателями с фазовым ротором.
. С комплектуемыми регулируемыми
электроприводами, применяемыми для механизмов и устройств, требующих
регулирования скорости. Они состоят из электродвигателя, устройства
регулирования скорости и в ряде случаев устройств питания электродвигателя,
электромагнитной муфты и т. п.
Применение комплектных регулируемых
электроприводов приобретает особое значение при автоматизации пищевых
производств, когда одной из задач является изменение производительности
механизмов (насосов, вентиляторов, компрессоров и др.) при изменении параметров
процесса либо по заданной программе. Особое преимущество такого регулирования
проявляется в отсутствии необходимости устанавливать на трактах подачи сырья
запорной арматуры (шиберов, задвижек), требующей повышенного внимания при
эксплуатации из-за специфических особенностей сырья, полупродуктов и продуктов
пищевых производств (засахаривание, забивание, разъедание и т. п.) и являющейся
причиной возможного застоя продукта и связанного с этим микробиологического
заражения.
Отечественная промышленность выпускает
комплектные регулируемые электроприводы тиристорные с электродвигателями
постоянного тока и приводы, регулируемые с электромагнитной муфтой скольжения и
электродвигателями переменного тока.
При выборе режимов различают два типа схем.
. Схемы управления электроприводами отдельных
технологических участков, установок и механизмов, работающих по индивидуальной
программе.
. Схемы управления электроприводами транспортных
и других механизмов, образующих единую поточно-транспортную систему (ПТС).
Для электроприводов технологических механизмов,
работающих по индивидуальной программе, наибольшее распространение получили
схемы, обеспечивающие следующие режимы работы электроприводов:
· работа в местном и дистанционном режимах при
управлении кнопками;
· длительная и кратковременная
(импульсная) работа;
· работа в местном (при управлении
кнопками) и автоматическом режимах;
· автоматическое включение резервного
агрегата, перевод из режима рабочего агрегата в режим резервного агрегата и
обратно.
Автоматическая защита. Автоматическая
защита является одной из важнейших функций в схемах автоматизации
технологических процессов.
В принципиальных электрических схемах
поточно-транспортных систем (ПТС) все механизмы связаны между собой
блокировочной зависимостью, которая предусматривает следующее:
· последовательность пуска механизмов в
направлении, обратном потоку материалов;
· автоматическую остановку всех
механизмов предшествующих по потоку материалов в случае остановки любого из
механизмов, препятствующую образованию завалов.
Для механизмов, входящих в состав ПТС, обычно
применяют дистанционное сблокированное управление с автоматическим пуском
приводных электродвигателей всех механизмов сблокированной цепи. При этом для
каждого из механизмов предусматривают следующие режимы работы: централизованный
сблокированный; местный сблокированный; местный не сблокированный (для
ремонтных работ).
При большом числе механизмов, особенно в тех
случаях, когда они расположены в разных зданиях или на разных этажах одного
здания, применяют централизованное управление.
В местном сблокированном режиме пуск и остановка
осуществляются теми же кнопками, но включение механизма возможно только в том
случае, если уже работает связанный с ним по блокировке механизм.
В дистанционном режиме пуск механизмов
осуществляется с пульта управления, причем он возможен только после подачи
предпускового сигнала и квитирования его с рабочих мест в течение заданного
времени. При квитировании предпускового сигнала снимается звуковой сигнал и на
пульте загорается табло, разрешающее пуск.
Пуск механизмов осуществляется при помощи кнопок
индивидуальных и на группу механизмов. При этом пуск должен быть произведен в
течение заданного времени. Если оператор не уложится в отведенное время, то
пуск не произойдет и все операции по пуску необходимо повторить сначала.
9.2 Методика выбора и обоснования
параметров программируемых систем управления
Состояние ОАУ может оцениваться по входным
величинам  , воспринимаемым
системой от объекта и отражающим его свойства, или по значениям функций от
входных величин
, воспринимаемым
системой от объекта и отражающим его свойства, или по значениям функций от
входных величин  . Величины или
функции, которые непосредственно сопоставляются с уставками (нормами), являются
непосредственно контролируемыми величинами (параметрами).
. Величины или
функции, которые непосредственно сопоставляются с уставками (нормами), являются
непосредственно контролируемыми величинами (параметрами).
Чтобы получить в результате измерительного
преобразования (контроля) информацию о соотношении между текущим состоянием ОАУ
и нормальным, любой измерительно-преобразовательный элемент (ИПЭ) ПСУ, в том
числе автоматизированной системы контроля, должен выполнять следующие основные
функции: восприятие входных величин  и
преобразование их в сигналы, необходимые для последующих операций; формирование
и реализация норм (уставок) в аналоговом и цифровом видах; сравнение входных
величин или функций от них с описанием норм (уставок); формирование
количественного результата; выдача количественных результатов о состоянии ОАУ;
автоматическое управление работой ПСУ; аналого-цифровое и цифро-аналоговое
преобразования; выдача аналоговой или цифровой информации; вычислительные
процедуры над аналоговыми и цифровыми сигналами или над результатами контроля;
формирование тестирующих и компенсирующих воздействий на ОАУ, необходимых для
получения измерительной (контрольной) информации; выполнение операций
самоконтроля системы.
и
преобразование их в сигналы, необходимые для последующих операций; формирование
и реализация норм (уставок) в аналоговом и цифровом видах; сравнение входных
величин или функций от них с описанием норм (уставок); формирование
количественного результата; выдача количественных результатов о состоянии ОАУ;
автоматическое управление работой ПСУ; аналого-цифровое и цифро-аналоговое
преобразования; выдача аналоговой или цифровой информации; вычислительные
процедуры над аналоговыми и цифровыми сигналами или над результатами контроля;
формирование тестирующих и компенсирующих воздействий на ОАУ, необходимых для
получения измерительной (контрольной) информации; выполнение операций
самоконтроля системы.
Порядок выполнения операций (последовательно или
параллельно) во многом определяет количество элементов системы, быстродействие,
надежность и т.п. Использование для совместной работы функциональных блоков
стандартных агрегатных комплексов и цифровых интерфейсов значительно упрощает
процесс разработки системы и её метрологическое обеспечение.
Система, содержащая вычислительную
(микропроцессорную) технику, является более универсальной, так как может
выполнять функции систем различного назначения при их перепрограммировании.
Наличие контура обратной информационной связи позволяет организовать
компенсационные методы измерения, позволяющие получить более высокие, по
точности, характеристики. Изменение скоростей получения и выдачи информации в
ПСУ возможно при использовании запоминающих устройств (быстрого запоминания
значений контролируемых величин и медленной выдачи информации и наоборот).
Введение адаптации систем к исследуемым величинам, структурной и информационной
избыточности способствует повышению надежности, помехоустойчивости, точности и
гибкости работы.
Отличительной особенностью третьего этапа
является формализация алгоритмов на уровне арифметических и логических
операций, а не на уровне операций, реализуемых аппаратно. В блок-схеме
алгоритма намечается разделение алгоритма решаемой задачи на программную и
аппаратную части.
Рис. 9.2 -
Последовательность разработки технического обеспечения
Четвертый этап заключается в выборе структуры,
здесь главное - раздвоение процесса проектирования на аппаратную и программную
части (разработка устройства сопряжения с объектом (УСО) и создание программы
вычислений в соответствии с алгоритмом решения задачи. Ограниченные возможности
микропроцессоров (МП) (в частности, по быстродействию) приводят к необходимости
выполнения ряда операций с помощью внешних устройств обработки сигналов. Кроме
того, некоторые операции проще выполнить с помощью простейших аппаратных
средств, в то время как их программное исполнение затруднительно. Разумное сочетание
аппаратных и программных операций позволяет снизить требования к вычислительным
возможностям МП и упростить реализацию системы в целом.
На пятом этапе (детализации) разработка
аппаратной части завершается составлением функциональной схемы УСО на уровне,
позволяющим выбрать элементную базу, оценить объём аппаратных затрат и перейти
к составлению принципиальной схемы. Составленная на этом этапе рабочая
программа позволяет оценить требуемый объём вычислительных затрат (объём ОЗУ,
ПЗУ, время вычислений и т.п.) и перейти к трансляции программы на язык машинных
кодов МП.
На шестом этапе осуществляется при необходимости
корректировка функциональной схемы или рабочей программы, структуры системы,
алгоритма, метода или задачи. Корректировка схемы или рабочей программы
применяется, если требуется незначительное сокращение аппаратных или
вычислительных затрат. Корректировка структуры проводится, когда обнаружено
существенное несоответствие её основных характеристик предъявляемым
требованиям, которое не может быть устранено на этапе детализации.
Варианты решений здесь представлены следующие:
выполнение части вычислительных операций аппаратным путём в связи с малым
быстродействием МП; замена некоторой аппаратурной реализации на программную в
связи с избытком быстродействия МП; изменение способа обмена данными между
внешними устройствами и МП из-за больших затрат времени или объёма памяти;
выбор более подходящей микроЭВМ (комплекта МП) и элементной базы для
аппаратурной части.
Корректировка алгоритма бывает необходима, если
выясняется, что выбранный алгоритм нельзя реализовать на основе имеющейся
элементной базы, или его реализация не удовлетворяет заданным техническим
требованиям.
Проводится анализ возможности упрощения и
видоизменения алгоритма. Если же анализ показывает, что никакие упрощения и
видоизменения неприемлемы, то необходима корректировка метода решения задачи и
постановки самой задачи.
Обоснование структуры ПСУ. Могут быть
выделены четыре типа наиболее характерных схем функциональной структуры ПСУ
технологическими процессами:
) МПС (микроЭВМ) ПСУ выполняет только
информационные функции, управляющие функции реализуются локальными системами
автоматического контроля, регулирования и управления (САК, САР, САУ);
) ПСУ выполняет те же функции, что ПСУ 1 - го
типа, но имеет ещё блок 5 -советчик (рис.8, а);
) МПС (микроЭВМ) ПСУ выполняет информационные
функции, настраивает локальные системы, советует, рассчитывает и выдаёт
управляющие воздействия для участков производства;
) МПС (микроЭВМ) ПСУ выполняет информационные и
полностью управляющие функции в режиме прямого цифрового управления ТП (Рис.
8,б). При централизованной структуре ПСУ все подсистемы расположены в одном
месте предприятия и на одном АРМ диспетчера, УВК которого связан каналами
передачи с отдельными ТП участков.
В функционально-распределенной ПСУ все
функциональные подсистемы распределены между несколькими управляющими
вычислительными комплексами (УВК), размещёнными в одном месте предприятия.
Территориально-распределённая ПСУ построена по следующему принципу: система
разбивается на ряд взаимосвязанных территориально-распределённых подсистем
(производственных станций управления).
Территориально и функционально распределённые
ПСУ - это совокупность функциональных устройств, управляемых своими
микроконтроллерами, центрального процессора, управляющего всей системой в целом
и магистрали (линии связи), связывающей между собой разнесённые по
производственным помещениям станции системы управления. Комбинированные ПСУ
содержат элементы территориально и функционально распределённых систем.

Рис. 9.3 -
Структуры ПСР ТП, построенных по территориальному принципу (а -
централизованная; б - территориально-распределённая; в - территориально- и
функционально-распределенная; г - комбинированная): С,С0,С1,…,Сn -
централизованная система и её подсистемы; Р1,…, Рn -участки ТП; СУП - станции
управления процессом; ГСУ. ЦСУ - групповые и центральные станции управления
Выбор технических средств, входящих в ПСУ. Все
средства, образующие ПСУ, распадаются на три вида по своему отношению к
двунаправленному потоку информации, связывающему оператора с объектом: средства
обмена информацией, средства управления, обработки и хранения информации и
вспомогательные средства, которые обеспечивают функционирование первых двух
видов.
При рассмотрении ПСУ выделяют конструктивные,
энергетические и информационные структуры. Структура конструкции системы
содержит информацию о механическом взаимодействии её элементов (компонентов
схемы, плат, модулей блоков, каркасов, стоек и т.д.). Структура энергетических
связей содержит информацию об источниках и потребителях электрической энергии,
необходимой для работы элементов системы. Структура информационных связей
содержит информацию о том, как происходит обмен информацией между элементами
системы, объектом и системой, оператором и системой. Она является наиболее
важной и первичной по отношению к другим структурам. Поэтому важнейшими
свойствами ПСУ является её способность обеспечения в нужной форме в заданное
время требуемой информации с заданными характеристиками, а критерием качества
системы могут служить минимальные суммарные затраты на достижение этой цели.
Внутренняя структура системы должна строиться
так, чтобы обеспечить преобразование потока информации, получаемого от объекта,
в требуемую для оператора форму. Это общее условие распадается на ряд частных
требований, связанных с количественными и качественными показателями
конкретного источника информации. Удовлетворение этих частных требований и
определяет информационную структуру системы. Решение задачи системного обмена
информацией обеспечивается выбором эффективных методов обмена информацией между
элементами системы, оптимальным выбором алгоритмов и средств её обработки,
уменьшающих интенсивность информационных потоков.
Количественную сторону системного обмена
информацией характеризуют следующие показатели: количество источников и
потребителей (приемников) информации; расположение источников и приемников в
пространстве; мощность входных и выходных потоков информации; интенсивность
информационных потоков и др.
Графически информационная структура системы
изображается в виде соединения прямоугольников, внутри которых имеется название
или условное обозначение устройств, составляющих систему. Двойными линиями со
стрелками показываются информационные связи, по которым идёт обмен дискретными
(кодовыми) сигналами, а одинарными - связи, по которым идёт обмен аналоговыми
или импульсными сигналами.
ПСУ чаще всего выполняются так же, как и
измерительно-вычислительные комплексы (ИВК), на базе управляющих вычислительных
комплексов (УВК), которые включают в себя средства управления, обработки и
хранения информации, оперативно-диспетчерское оборудование для обмена
информацией с персоналом (рис. 9.4).
Рис. 9.4 -
Структурная схема измерительно-вычислительного комплекса: УВК - управляющий
вычислительный комплекс; КВ - контроллер ветви; А - адаптер; КА - коллективный
адаптер; 1 - устройство вывода информации дискретных сигналов; 2 - устройство
ввода кодов сигнала; 3, 5 - устройства выдачи аналоговых сигналов на объект
управления; 4 - устройство сопряжения с объектом; 6 - 9 - средства измерений
аналоговых сигналов; 10, 11 - оперативно-диспетчерское оборудование; 12 -
сервисное устройство
Остальные аппаратные средства, входящие в ПСУ,
служат для получения информации об объекте и её преобразования для подачи в
микроЭВМ (МП). Если устройство не может быть непосредственно подключено к
магистрали, оно связывается через согласующее устройство-адаптер (А). Применяются
также коллективные адаптеры (КА), обслуживающие несколько устройств.
Непрерывные и дискретные сигналы могут поступать непосредственно на устройства,
связанные с магистралью, или через устройства, работающие в автономном режиме.
К магистрали ветви могут подключаться устройства, выполняющие функции обмена с
персоналом, и вспомогательные устройства.
На рисунке 9.4 в качестве примера к магистрали
ветви подключены устройства вывода 1, ввода 2, выдачи 3 и 5 (через адаптер А),
причём устройство 3 выдает на объект сигналы через автономное устройство
сопряжения 4.
Средства измерений 6 - 8 подключены к магистрали
ветви через КА. Кроме того, к ней подсоединены измерительное устройство 9,
оперативно-диспетчерское оборудование 10, 11 (через А) и сервисное устройство
12.
Программное обеспечение (ПО) УВК, т.е.
совокупность программных средств, позволяющих пользователю применить микроЭВМ
(МПС) и все входящие в УВК устройства, состоит из внутреннего и внешнего:
внутреннее ПО включает систему автоматизации программирования, операционные
системы, систему функционального контроля; внешнее ПО образует пакеты
прикладных программ и специализированные программные системы.
Средства системного обмена делятся на три
группы: средства межмашинной связи (СМС), контроллеры ветвей (КВ), адаптеры
(А). СМС и КВ связывают между собой системные магистральные или радиальные
интерфейсы, адаптеры - системный интерфейс с прибором или периферийным
устройством.
Способы и алгоритмы передачи управления ветвью
зависят от вида интерфейса ветви и конкретной реализации аппаратурных и
программных средств, обеспечивающих работу контроллера. КВ выполняет функции
управления интерфейсом ветви в объёме, предусмотренном спецификациями
интерфейса. Структура КВ определяется требованиями согласования контроллера с
интерфейсом ветви, которые реализуются на нескольких иерархических уровнях.
Первый уровень - физический - обеспечивает со6людение требований интерфейса
ветви в отношении параметров принимаемых и выдаваемых электрических сигналов.
Второй - логический (канальный) - обеспечивает требуемые логические и временные
соотношения между сигналами в магистрали при обмене информацией, а также приёме
и передаче управления магистралью ветви. Третий - управляющий - организует
системное функционирование КВ.
Адаптеры различаются по типам интерфейсов,
согласование с которыми они обеспечивают, по объёму выполняемых интерфейсных
функций, по конструктивному исполнению. Кроме основной, адаптер может выполнять
ряд вспомогательных функций (диагностика, контроль передаваемой информации,
преобразование форматов данных). Характеристиками адаптера являются:
быстродействие, объем передаваемой или принимаемой информации, приоритетность
этой информации в системе и т.д. Структура любого адаптера состоит из двух
основных частей: интерфейсной - непосредственно связанной с интерфейсом ветви,
и приборной - связанной с входом (выходом) подключаемого периферийного
устройства. Конструктивно адаптеры могут выполняться в виде модулей, входящих в
каркас и связанных с магистральным интерфейсом; в виде узлов, подключаемых
устройств и сменных блоков.
Оперативно-диспетчерское оборудование
обеспечивает решение следующих задач: ввод, редактирование и отладка программ;
ручное управление процессом получения и обработки измерительной информации;
считывание результатов испытаний, контроль и диагностика работоспособности
системы. Средства ручного ввода информации в системах извлечения информации
представлены различными клавиатурами, регулировочными органами и т.д.
Алфавитно-цифровые (символьные) клавиатуры обладают универсальностью, имеют
стандартный состав и взаимное расположение клавиш, хорошие эргономические
характеристики при размещении клавишного поля под углом 5 - 150 по
отношению к горизонтальной плоскости. Большинство серийно выпускаемых клавиатур
обеспечивает ввод информации в устройство обработки в стандартных кодах обмена
информацией. В случае, когда число вариантов вводимых сообщений невелико,
целесообразно применение функциональных клавиатур, обладающих лучшими
эргономическими характеристиками при числе вводимых сообщений (функций) не
более 40-50, не требующих жестких ограничений на размещение клавишного поля
(оно может быть размещено под оптимальным для оператора углом 0-750).
В большинстве современных средств отображения
информации используется растровый принцип формирования изображений,
обеспечивающий по сравнению с сегментным, более высокую надежность, лучшие
эргономические характеристики, универсальность, он пригоден для отображения
информации в символьной и графической форме.
Быстродействие современных систем обработки
сигналов ограничивается скоростью обмена данными между объектом и микроЭВМ.
Сбор и обработка измерительных данных в таких системах могут производиться в
двух основных режимах: в реальном масштабе времени и в режиме с разделением времени.
В первом случае измерительная информация поступает непосредственно с
аналого-цифрового преобразователя - АЦП (под АЦП в данном случае
подразумевается любой вид преобразования исходного сигнала в коды микроЭВМ) или
с АЦП через коммутатор в запоминающее устройство микроЭВМ (МПС), где
подвергается обработке по заданному алгоритму. Во втором случае результаты
измерений поступают на промежуточное буферное ЗУ (ОЗУ, магнитные диски), где
запоминаются на определённое время. Передача данных на микроЭВМ (МПС) производится
либо в ручном (путём постановки соответствующего диска), либо в автоматическом
(через соответствующий интерфейс) режиме после накопления определённого объёма
информации или по команде оператора.
Основными достоинствами систем, работающих в
реальном масштабе времени, являются сравнительно низкая стоимость и простота
конструктивного исполнения. В системах с разделением времени необходимо
использование дополнительных ЗУ. Скорость обмена информацией между буферным ЗУ
и микроЭВМ (МПС) при этом уже не так критична, поэтому такая структура системы
является более предпочтительной при обработке быстропротекающих (переходных и
импульсных) процессов, если достаточна ёмкость ЗУ. В современных системах
анализа переходных процессов применяются обычно способы запуска АЦП по заданным
параметрам его выходного сигнала.
Применение серийных цифровых приборов,
обеспечивающих преобразование аналогового сигнала в коды машин (цифровые
вольтметры, мультимеры, частотомеры и др.), в ПСУ, хотя и обеспечивает более
высокие метрологические показатели, однако резко увеличивает стоимость систем.
Модульные средства измерений, входящие в ИВК, выполняют те же функции, что и
приборы. Они делятся на две группы: нормирующие преобразователи и АЦП.
Нормирующие преобразуют сигналы от датчиков неэлектрических величин в
унифицированный сигнал напряжения или тока (применяются при необходимости
нормирующие преобразователи электрических сигналов). Они могут иметь несколько
входов и выходов, которые подключаются к входу другого преобразователя, коммутатора
или АЦП. Сигнал с выхода АЦП в виде дискретных сигналов (кодов) поступает на
магистраль ИВК либо непосредственно через интерфейсный узел, либо через
устройство гальванической развязки. При необходимости между магистралью и
выходом АЦП устанавливается буферное ЗУ.
Классификация алгоритмов функционирования ПСУ.
Основные классификационные признаки алгоритмов функционирования ПСУ даны на
рисунке 9.5. Логические алгоритмы ограничиваются выполнением операций сравнения
контролируемых параметров с допустимыми пределами их измерения и некоторых
логических операций. Вычислительные алгоритмы наряду с логическими обеспечивают
выполнение математических операций: экстраполяцию, интерполяцию, линеаризацию,
интегрирование, все арифметические действия и др.
Рис. 9.5 -
Классификационные признаки алгоритмов функционирования микропроцессорных ПСУ
Адаптивные алгоритмы реализуют функции
самообучения и оптимизации процесса обработки информации в зависимости от
изменения внешних факторов и внутренней структуры объекта контроля. Они
обеспечивают исправление ошибок, заложенных в исходных алгоритмах, и некоторую
оптимизацию процесса контроля и управления.
Эти алгоритмы могут изменяться в зависимости от
предшествующих результатов.
Алгоритмы функционального контроля не
предусматривают количественной оценки с установленной заранее погрешностью, а
состояние объекта оценивается по некоторым качественным реакциям на внешние или
искусственные (тестовые) воздействия.
Непрерывные алгоритмы присущи встроенным
системам контроля сложных автоматически восстанавливаемых систем.
Главная цель - обнаружить неисправность за время
выполнения объектом основной задачи и автоматически включить резерв или
провести регулировку параметра, значение которого вышло за допустимое, или в
случае невозможности восстановления в заданное время дать информацию о
необходимости передачи выполнения задания другому объекту.
Алгоритм функционирования систем контроля связан
с проблемами алгоритмизации задач контроля и с построением оптимальной с точки
зрения технико-экономических критериев аппаратуры контроля.
.3 Разработка производительной
системы управления технологическими процессами в птичнике
При применении датчиков (первичных измерительных
преобразователей) вид поступающей информации - аналоговый, хотя могут быть
применены и датчики, выдающие информацию непосредственно в дискретном виде.
Значение FC определяется верхней
частотой неравномерности вращения коленчатого вала, tC
- длительностью переходного процесса выбег-разгон
Входные величины датчиков при динамическом
методе являются преимущественно временными (зависимости w(t),
e(t)),
пространственными (зависимости e(j)) или
пространственно-временными (например, зависимость e(t,
j)),
а также преимущественно активными. Они могут быть как непрерывными, так и
дискретными (например, при применении фотоэлектрических датчиков угла).
Пропускная способность канала передачи
информации с этого датчика с погрешностью d =0,1% должна быть:
 бит/с.
бит/с.
Так как для обработки сигналов в микроЭВМ (МПС)
используется двоичное или блочное кодирование, то аналоговые сигналы с датчиков
необходимо преобразовать с помощью аналого- и время-цифровых преобразователей в
код. Обработка сигнала блочным кодированием в последнем случае практически
невозможна. В то же время при двоичном кодировании Dfа=1/аt0=50-100кГц;
DfВ=5-10МГц,
что вполне реально. Задержка в обработке двоичного сигнала при кодировании и
декодировании равна tза=2t0=20мкс;
tзв=0,2
мкс.
Расчёт показателей МПС. В соответствии с
методикой (глава 8) определим требуемые параметры (в скобках даны параметры для
передвижной системы на базе микроЭВМ INTEL 8089: Кмнi= 3 (3); Ккнi=
2 (2); Ктрi= 2 (2); Кδдi=1,6
(1); Ксввi= Ксвывi= 0,6 (0,6); Кввij= 0,9 (1);
Квывi= 0,9 (0,9); Тзд= 300с (180с); Nпо= 80
(100).
Следовательно, при измерении временных
интервалов (при применении 16 - разрядного время-кодового преобразователя)
объём вводимой информации WВВ=106Кбит,
при съёме с фотоэлектрического датчика WВВ=1,6Мбит.
В этом случае при применении 10-разрядного АЦП объём WВВ=300Кбит.
Объём вводимых данных с ПЗУ значительно ниже (около 30 Кбайт).
Требуемая скорость обработки входной информации
составляет: vввn=6000 измерений/с (12000 измерений/с) или при
16-разрядных (10-разрядных) числах vввn= 0,1 Мбит/с (0,12 Мбит/с).
Скорость ввода данных с ПЗУ: с накопителя на
магнитных дисках составляет vввn=0,05Мбит/с; быстродействие
программного ввода vввn=20 Кбайт/с; (Для БК-0010 - быстродействие
канала прямого доступа в память vввnд=150 Кбайт/с (vг=300
Кбайт/с)).
Ввод данных осуществляется с устройства
сопряжения с объектом и с ПЗУ (рабочие программы, программы прерывания,
стандартные программы, константы), т.е. nij= 2(2). При работе ИЭС в
режиме с разделением времени устройства ввода данных в микроЭВМ работают
поочерёдно, т.е. Nввij= 1. Необходимо ориентировочно выполнить
следующее число операций: ввод с входного порта с учётом объёма Wвв
- Nпоп»30000 (»30000);
ввод с накопителя Nпон » 5 (5); сложение-
вычитание Nпос » 300000 (300000), умножения Nпоу
»60000
(60000). Общее число операций NпоS»
400000 (400000). Принимаем Kпо =1 (1) сложения с плавающей запятой tкпу
= 218 мкс
Для оценки требуемого быстродействия и объёма
вычислений определим расчётные показатели.
. Время ввода информации при съёме сигнала
непосредственно с датчиков:
 .
.
 .
.
. Среднее быстродействие датчиков:
при применении операций с плавающей запятой:эвмп
=1/(0,75·218·10 - 6 + 0,15·360·10 - 6)=4,6·103
операций/с.
3. Время выполнения первичной обработки. Так как
требуемое быстродействие ниже чем у серийных микроЭВМ, то целесообразно принять
значение vэвм, равным быстродействию последних. Тогда имеем:
- на базе INTEL 8089 при съёме сигнала с
датчика:
Тпо = NпоS
кпо
/vэвм.
Тпо = 4·105/2·105=2,0с.
4. Время вычисления и формирования выходных
данных для датчиков на базе INTEL 8089:
Тпр =Wвыв
Kтрi
Nпр /Kбд vэвм.
Тпр = 5000×100×1,5/2×200000=1,9
с.
. При оценке объёма памяти ОЗУ для систем на
базе серийных микроЭВМ достаточно определить объём ОЗУ пользователя, который
для 16 - разрядных входных и выходных величин равен:
озуп=1,4(2a+b).
озуп=1,4(2×30000+5000)=86
16-разрядных чисел или 172Кбайт.
Определение требуемой длины разрядной сетки при
обработке аналоговых сигналов.
Определение длины разрядной сетки можно
осуществить исходя из точности измерения входных данных. При применении
стандартных АЦП добиваются, чтобы входной сигнал х изменялся от 0 до хm.
Если х0 необходимо измерить с погрешностью Dх0,
то масштаб единицы младшего разряда равен h»хm/2п.
При этом погрешность представления непрерывной величины х в дискретном виде
будет 0£Dх1£h.
Известно, что погрешность Dх1 является
равномерно распределённой случайной величиной:

Для выбора h необходимо, чтобы средняя
квадратическая погрешность дискретизация sDх1
была бы меньше требуемой средней квадратической аппаратурной погрешности
измерения х0, т.е. sDх1<
sDх0
или sDх1
= кsDх0,
где 0<к<1. Так как для равномерно распределённой случайной величины:
 ,
,
где ent - целая часть числа.
Например, при dхи=0,1%
получим R=9.
В микропроцессорном исполнении системы
целесообразно выбирать разрядность, кратную восьми. В данном случае необходимо
выбирать R=16.
.4 Обоснование выбора технических
средств, сбора и обработки информации, промышленный вычислительный комплекс
Промышленная рабочая станция с 10,4 ЖК-дисплеем
и объединительной платой с шиной PCI
Общие сведения:- 842 представляет собой
промышленную рабочую станцию с ярким цветным DSTN или TFT - дисплеем (диагональ
10,4 разрешение 640×480 пикселей),
специально разработанную для применение в промышленных условиях.- 842 может
поставляться с объединительной платой с восемью слотами ISA или ISA/PCI.
Технические данные:
§ Лицевая панель: алюминиевая, степень защиты
соответствует NEMA4 или IP 65,
§ Конструкция: высокопрочное шасси из нержавеющей
стали
§ Отсек для дисководов содержит один
малогабаритный 3,5 РГМД, один 3,5 НЖМД и один малогабаритный CD-ROM (CD-ROM и
НЖМД устанавливаются по заказу),
§ Видеоплата: РСА - 6653 (ISA) с установленным на
плате 1Мбайт видеопамяти и БИС CHIPS 65545 с одновременной поддержкой ЭЛТ и
плоских панелей,
§ Система охлаждения: один вентилятор на задней
панели с производительностью 82 м3/ч, и один в источнике питания,
§ Мембранные клавиатуры: одна с 60 клавишами для
ввода данных, одна с 10 функциональными клавишами и 10 программируемыми
функциональными клавишами макрокоманд,
§ Соединитель клавиатуры: 5 - контактный
соединитель типа DIN с пыленепроницаемой заглушкой,
§ Индикаторы: светодиоды включения питания и
доступа к НЖМД,
§ Сенсорный экран (по заказу): аналоговый
резистивный с контроллером, подключенным через порт RS - 232, ресурс - 35 мил.
касаний
§ Диапазон рабочих температур: 0…+ 50оС,
§ Относительная влажность: 5…85% 50оС
без конденсации влаги,
§ Диапазон температур хранения: - 40…+ 60 оС,
§ Относительная влажность (в нерабочем состоянии):
5…95% без конденсации влаги.
§ Габаритные размеры: 482×307×266
мм.,
§ Вес 15 кг.,
§ Нормы безопасности: UL/CSI/TUV, CE, FCC, BCIQ,
Пассивные объединительные платы
§ PCA - 6108P3: 4 ISA, 3 PCI, 1 CPU - слот
§ PCA - 6108С: 8 ISA - слотов
Источник питания:
§ Входное напряжение: 180…260 В переменного тока частотой 47 - 63 Гц.
§ Выходное напряжение: +5В - 25А; +12В - 9А; -5В -
0,5А; -12В - 25А.
§ Средняя наработка на отказ 100 000 часов.
§ Нормы безопасности: UL/CSA/TUV
Таблица 9.1 -
Жидкокристаллические дисплеи
|
Модель
|
AWS-842
TPB
|
AWS-842
SB
|
|
Тип
дисплея
|
10,4
цветной TFT
|
10,4
цветной DSTN
|
|
Максимальная
разрешающая способность
|
640×480
|
|
Максимальное
число цветов
|
256
К
|
4096
|
|
Размер
точки растра, мм
|
0,33×0,33
|
|
Яркость,
кд/м2
|
250
|
130
|
|
Угол
обзора
|
90о
|
|
Рабочий
диапазон температур
|
0..50
оС
|
0…45
оС
|
|
Подстройка
параметров
|
Яркость
|
Контрастность
|
|
Средняя
наработка на отказ для ЖКИ
|
50
000 часов
|
|
Средняя
наработка на отказ для системы задней подсветки
|
20
000 часов
|
25
000 часов
|
|
Установленная
видеоплата
|
PCA-6653
|
PCA-6654LB
|
|
Объединительная
плата
|
PCA-6108С
|
PCA-6107P2
|
|
Одновременный
режим
|
Есть
|
Преимущества IBM PC совместимых промышленных
рабочих станций:
§ Микропроцессоры IBM РС оптимальны по соотношению
цена - производительность;
§ Рабочие станции не являются простой заменой
панели оператора, они поддерживают такие функции, как объединение сетей
промышленных контролеров (ПЛК), регистрация параметров;
§ Стандартные операционные системы позволяют
выбирать инструментальные средства разработки прикладного программного
обеспечения от множества независимых фирм - поставщиков, возможна также
разработка заказных прикладных программ, написанных для удовлетворения
потребностей пользователя;
§ Цены на компоненты для IBM РС совместимых
компьютеров ниже, чем для систем с другой архитектурой;
§ IBM РС широко распространены;
§ Применение рабочих станций;
§ Автоматически передают данные, как оператору,
так и от него;
§ Хранят и анализируют информацию;
§ Представляют информацию в удобном формате;
§ Предоставляют возможность оператору
непосредственно управлять производственным процессом;
§ Самостоятельно управляет процессом.
Рабочие станции обеспечивают безопасность,
регистрируя на определенные ситуации подачей многократных сигналов тревоги.
Сигналы тревоги могут быть поданы быстро с помощью графики и автоматических
сообщений оператору. Рабочая станция может быть полезным средством в процессе
решения задачи сокращения времени простоя предприятия до минимума.
Информация с различных этапов технологического
процесса может быть отображена в реальном времени, сохранена или сделана
доступной для организации управления через сеть. Рабочая станция может
организовать взаимодействия с любым оборудованием, от ПЛК до универсальных
вычислительных машин.-735 12 - канальная плата дискретного ввода/вывода с
релейными выходами
Плата PCL-735 (Рис.9.6) идеально подходит для
управления исполнительными устройствами и коммутации сигналов и имеет 12
каналов дискретного вывода, использующих электромагнитные реле с переключающим
контактом.
Каждое реле на плате имеет светодиодный
индикатор состояния для облегчения отладки и предотвращения повреждения реле.
Также есть возможность считывания текущего состояния реле.
Рис. 9.6 - PCL -735
12 - канальная плата дискретного ввода/вывода
Основные характеристики:
§ 12 выходных реле
§ Светодиодный индикатор состояния
§ Возможность считывания текущего состояния реле
Область применения:
§ Промышленная автоматизация
§ Релейное управление
§ Коммутация сигналов
Технические данные:
§ Релейный ввод
§ Тип реле: с переключающим контактом
§ Тип контактов: каналы 0-11 - нормально замкнутые
или нормально разомкнутые
§ Нагрузка: переменный ток до 125 В 0,6 А;
постоянный ток до 100В 0,6А
§ Напряжение пробоя: не менее 1000 В
§ Время замыкания 3 мс; время размыкания 3 мс
§ Общее время переключения 10 мс
§ Сопротивление изоляции не менее 1000 мОм
§ Ресурс: не менее 500 000 срабатываний при
нагрузке 30В 2А не менее 2 мил. при 30В 1А
Общие параметры:
§ Требование по питанию: +5В 200мА (мин); +12В
270мА (макс)
§ Диапазон рабочих температур 0 - 60оС
§ Диапазон температур хранения -20 - +70 оС
§ Относительная влажность воздуха 5 - 95% без
конденсации влаги
§ Порты ввода/вывода область из двух портов
ввода/вывода в диапазоне от 200h до 3f8h; размеры 155×100
мм.
10. Организация эксплуатации и
ремонта электрооборудования птичника
На современном этапе, для хозяйства наиболее
предпочтительна планово-предупредительная работа, которая включает кроме
обкатки машин, ежедневные и периодические (плановые) технические (ТО-1, ТО-2)
обслуживания, а так же сезонное обслуживание.
Основной вид технического обслуживания -
ежедневный (ежемесячный) - ЕТО. Без проведения ЕТО запускать машину в работу
запрещается. ТО-1 и ТО-2 проводят после наработки определенного количества
часов.
Для транспортеров ЕТО начинают с проверки
состояния каналов, ограждений приводов, скребков транспортера. После этого
механизм включают. В конце работы канал, и цепь надо очистить и проверить
состояние узлов цепи. ТО-1 проводят через 90 часов работы. Сначала необходимо
выполнить ЕТО, затем проверить натяжение цепей привода и транспортера, при
необходимости отрегулировать, смазать подшипники скольжения поворотных роликов,
механизмов приводной станции натяжного винта, укомплектовать цепь недостающими
скребками. Проверить состояние электрооборудования. ТО-2 проводят через 270-300
часов. Сначала надо выполнить ТО-1, снять и разобрать цепи промыть их в
дизельном топливе, дефектные детали заменить или восстановить, затем собрать
цепи, промыть редуктор, проверить состояние зубчатых пар. Обнаруженные
неисправности устранить, износившиеся клиновые ремни заменить, транспортер
собрать и отрегулировать. Проверить состояние заземления.
Внутренние электропроводки в помещениях с
нормальными условиями осматривают не реже одного раза в шесть месяцев, а в
особо опасных помещениях не реже одного раза в три месяца. Осматривая
электропроводки, проверяют состояние изоляции, прочность крепления проводов и
контактов с электроприемниками.
При эксплуатации осветительных электроустановок
необходимо периодически осматривать и очищать осветительные приборы от пыли и
грязи, своевременно заменять перегоревшие лампы и систематически проводить
планово-предупредительные ремонты осветительных установок. При приемке в
эксплуатацию осветительных установок необходимо проверить соответствие проекту
всех элементов электроосветительного оборудования, мощность установленных ламп,
надежность контактов, крепление светильников, выключателей и других элементов
электроосветительных установок, заземление металлических деталей, которые в
процессе эксплуатации могут оказаться под напряжением.
Для улучшения освещения в помещении желательно
их стены и потолки красить в светлые тона, так как такие поверхности лучше
отражают свет. В светильниках надо устанавливать лампы определенной мощности;
установка ламп большей мощности ведет к перегреву светильника, патрона и
проводов, что может вызвать сгорание изоляции и короткое замыкание, разрушение
патрона и затенителя. При проверке и отчистке светильников необходимо обратить
внимание на заземление их металлических частей, состояние контактов, изоляцию
проводов и устранить недостатки. Осмотры и ремонт установок должны
производиться при снятом напряжении. В птицеводческих помещениях светильники
очищают от пыли и грязи не реже чем 2 раза в месяц.
ТО электродвигателей в пыльных, сырых и особо
сырых помещениях с химически активной средой 1 раз в 18 месяцев. При этом
осматривают состояние подшипников и подшипниковых щитов, состояние обмоток
ротора, статора. Проверяют крепление двигателя. Осматривают станину на наличие
механических повреждений.
При осмотре электрокалориферных установок
проверяют работу ТЭНов, контакты, целостность силовых проводов.
При осмотрах проверяют состояние заземляющей
проводки, шкафа управления и электрических щитков. Во время осмотров
восстанавливают окраску труб, заземления и так далее.
Согласно системе ППРЭсх предусмотрены текущий и
капитальный ремонты электромашин.
Для ремонта электрооборудования в АО «Птицевод»
имеется специальный цех для ремонта электрооборудования.
Текущий ремонт электродвигателей проводят через
24 месяца. Периодичность капитальных ремонтов не регламентируется, так как в
зависимости от условий среды и режимов работы сроки службы электродвигателей
колеблются от 1,5…2 и до нескольких лет. Зная реальные сроки эксплуатации
двигателей, используемых в конкретных технологических процессах, определяется
число капитальных ремонтов с учетом типоразмеров электродвигателей, и
обеспечивают на данный период необходимый резервный фонд.
Текущий ремонт электромашин проводят электрики
хозяйства. Перед текущим ремонтом электродвигатель очищают от пыли и грязи,
отъединяют от питающих проводов, рабочей машины, заземляющей шины и пускового
реостата (двигатель с фазным ротором), снимают с фундамента и доставляют в
мастерскую. Здесь проводят дефектацию электродвигателя, разбирают его, очищают
отдельные сборочные единицы, обмотки и ремонтируют их; пропитывают и сушат
обмотки, если это необходимо; ремонтируют контактные кольца и щеточный
механизм; проверяют подшипники и заменяют неисправные; ремонтируют или заменяют
детали; собирают и испытывают электродвигатель.
После покраски двигатель доставляют на место,
монтируют, проверяют его под нагрузкой вместе с рабочей машиной.
При капитальном ремонте все работы проводят на
специализированных предприятиях. При капитальном ремонте выполняют все операции
текущего ремонта и, кроме того, устраняют дефекты обмоток (или полностью
заменяют их) статоров, а так же проверяют и при необходимости заменяют вал
ротора. Если ремонт не целесообразен (машина морально устарела, значительно
повреждена активная сталь статора или ротора, нет лап и др.), то ремонтное
предприятие вправе составить с хозяйством двусторонний акт о
неремонтопригодности машины и ее списание.
У применяемых в хозяйстве установках
ультрафиолетового излучения в процессе эксплуатации уменьшается поток излучения
в результате старения и загрязнения источников облучения. Поэтому периодически
очищают облучатели и светильники от пыли и грязи и своевременно заменяют лампы
при отключенном напряжении.
11. Охрана труда
Охрана труда - это система законодательных,
социально-экономических, гигиеничных и лечебно-профилактических мероприятий и
средств, обеспечивающих безопасность и сохранение здоровья трудящихся в
процессе труда, их право на труд и отдых.
В ОАО «Птицефабрика «Колмогоровский бройлер»
действует система управления охраной труда, проводится аттестация рабочих мест.
Особое внимание уделяют очистки
электрооборудования. Не допускается образования слоя пыли на корпусе
электродвигателя, это приводит к перегреву и возникновению пожара. Электродвигатели
используются специального сельскохозяйственного исполнения типа 4А…СХ.
При ремонтных работах корпус батареи заземляют.
Категорически запрещается работать при
неисправном оборудовании и отсутствии ограждений, регулировать, смазывать,
очищать при работающих механизмах.
Выполняя ремонтные и регулировочные работы,
отключают общий рубильник на силовом щите и вывешивают плакаты «Не включать -
работают люди» Кроме того, снимаются предохранители силового щита. Возникшие в
технологическом оборудовании неисправности оператор устраняет, соблюдая правила
ТБ.
Строго следят за исправностью тары для переноски
птицы, перемещать тару надо в рукавицах, соблюдая нормы переноски тяжестей.
Обязательно соблюдать меры безопасность при перемещении инвентаря.
С охраной труда тесно связаны пожарная
безопасность, потому что пожары на производстве и в быту угрожают не только
материальным ценностям, но и жизни людей. В каждом птичнике находиться пожарный
щит. На нем располагают: багор, топор, ведра для переноса воды, лом. Так же
возле щита находиться ящик с песком. На территории сооружен пожарный резервуар.
Разработка противопожарных норм, правил и инструкций по проектированию,
строительству и эксплуатации зданий и установок, а так же надзор за соблюдением
правил ведет Управление пожарной охраны МЧС.
Уровень производственного травматизма и
профзаболеваний на предприятии. Данные по состоянию производственного
травматизма и профзаболеваний в ООО «Птицефабрика «Колмогоровский бройлер» за
последние три года представлены в таблице 11.1.
Таблица 11.1 -
Уровень травматизма
|
Показатели
|
Год
|
|
|
2007
|
2008
|
2009
|
|
Среднесписочное
число работников
|
260
|
238
|
223
|
|
Число
травмированных за период
|
5
|
4
|
2
|
|
Число
смертельных травм
|
0
|
0
|
0
|
|
Коэффициент
частоты травматизма
|
16,6
|
13,3
|
4,9
|
|
Коэффициент
тяжести травматизма
|
16
|
28,3
|
14
|
|
Коэффициент
потерь рабочего времени
|
266,7
|
389,9
|
68,9
|
|
Коэффициент
летальности
|
0
|
0
|
0
|
|
Количество
заболеваний
|
179
|
161
|
182
|
|
Затраты
на охрану труда, тыс.рублей
|
13,5
|
15,6
|
17,8
|
Следовательно, в ООО Птицефабрика
«Колмогоровский бройлер» строго соблюдаются: правила пожарной безопасности;
правила устройства электроустановок; правила технической эксплуатации
электроустановок и общие правила охраны труда.
Разработаны и доведены до сведения всего
персонала безопасные маршруты следования по территории к месту работы и планы
эвакуации на случай пожара и аварийной ситуации.
За нарушение требований инструкции работник
несет ответственность в соответствии с действующим законодательством.
Для помещения содержания птицы рассчитано
освещение: п.6.
В соответствии с ГОСТом нормированная
освещенность Е для птичников составляет 30Лк.
Также рассчитана вентиляция и отопление в
птичнике п.5,1;п.5,2.
Для вентиляции птицеводческих помещений
используются оборудование «Климат - 4». Вентиляция птицеводческих помещений
применяется для поддержания в допустимых нормами пределах влажности,
температуры и содержание вредных газов.
Из расчетных данных наибольшее значение
требуемого часового воздухообмена L = 41000 м3/ч, с учетом
равномерного распределения вентиляторов в птичнике. Выбирают вентиляторы ВО5 с
подачей L1 = 6000 м3/ч при давлении 19,6 Па. Число
вентиляторов n = L/L1 = 41000/6000 = 6,83. Принимают n = 7.
Для создания оптимального микроклимата выбраны
две калориферных установки СФОЦ - 100/0.5Т. Общая мощность каждой Pо
= 94 кВт, мощность электрокалорифера Pк = 90 кВт, число секций - 3,
36 нагревателей. Подача вентилятора при температурном перепаде 51…30 °С
1,25…2,5 м2/с двигатель Да112М4С.
Третью установку СФОЦ - 60/0.5Т, общая мощность
Pо = 69 кВт, мощность калорифера Pк = 67,5 кВт, 3 секции,
27 нагревателей, при температурном перепаде 50…30°С подача вентилятора 0,9…1,6
м2/с, тип двигателя Да9014С. Калориферные установки размещают в
специальных помещениях с торцов здания. С одной стороны устанавливают одну
установку СФОЦ - 100/0.5Т, с другой две другие.
Для защиты от поражения электрическим током
применяется защитное заземление, защитное зануление.
.1 Расчет заземления
В соответствии с ГОСТом 12.1.030-81 для защиты
от поражения током при повреждении изоляции необходимо применять защитное
заземление. Защитное заземление - это соединение с землей всех нормально не
находящихся под напряжением металлических частей электроустановок, могущих
оказаться под напряжением в результате повреждения изоляции.
Заземление предназначено для обеспечения работы
электроустановок, как в нормальных, так и в аварийных режимах. Сопротивление
контура заземления не должно превышать 4Ом. Принимают для расчета rз
= 4Ом. Выполняют заземление уголка 50 × 50мм,
длиной 5м, заглубленными на 0,7м от поверхности земли и связанными между собой
стальной полосой сечением 40 × 4мм.
Расчетное сопротивление грунта с учетом
сезонного коэффициента:
Ρрасч
= kс · k1· ρ,
где kс = 1,35 [7, табл. 27.2] и k1
= 1 [7, табл. 27.3], глина ρ = 150
Ом·м.
Ρрасч
= 1,35 · 1 · 150 = 202,5 Ом·м.
Сопротивление уголка (при глубине заложения hср
= 0,7 + 5/2 =3,25м):
Rв = 0,366 · ρрасч[lq
(kl/d) + lq(4hср+ l )/( 4hср - l)], [7, 27.3]
где ρ - расчетное
удельное сопротивление грунта, Ом·м; k - числовой коэффициент вертикального
заземлителя (для уголков k = 2,1); d - ширина полки, м; hср -
глубина заложения, равная расстоянию от поверхности земли до середины стержня,
м.в = 0,366·205,5·[lq (2,1·5/0,05)+0,5lq (4·3,2+5)/(4·3,2-5)]/5=37
Ом.
Расчетное сопротивление полосы связи:
Rг = 0·366ρрач·
lq [(k · l2)/(dh)]/l, [7, 27.6]
где ρрасч
= kсk1ρизм
= 4,4 · 1 · 150 = 660 Ом·м; l - длина горизонтального заземлителя, l = (96 +
18) · 2=228 м; k - коэффициент формы горизонтального заземлителя (для
прямоугольного k = 2); d - ширина полосы прямоугольного сечения, м; h - глубина
заложения горизонтального заземлителя, м.г = 0,366 · 660 · lq[(2 ·
2282)/(0,04 · 0,82)]/228 = 6,8 Ом.
Теоретическое число уголков: nт =
37/4 = 9,25 ≈ 10.
Расстояние между уголками: a = l228 / 10 = 22,8
м.
При nт = 10 и а/l = 22,8 / 5 = 4,5
находим по кривым [7, рис.27.1] ηв
= 0,9 и ηг
= 0,7 и определяем действительное число уголков:
д
= Rвηг/ηв[1/(rзηг)
- 1/Rг]/ηв.
[7, 27.12]
д
= 3,7 · 0,7[1 / (4 · 0,7) - 1 / 6,8] / 0,9 = 7,2.
Принимаем к монтажу 8 уголков и выполняем
поверочный расчет при n=8; а = 228 / 8 = 28,5; a/l = 28,5 / 5 = 5,7 и ηв
= 0,9; ηг
= 0,8.
Расчетное сопротивление заземляющего устройства:
расч.
= RвRг/(Rгnηв
+ Rвηг).
расч.
= 37 · 6,8 /(6,8 · 8 · 0,9 + 37 · 0,8) = 3,2 Ом;
,2 Ом < 4 Ом, т.е. условие rрасч ≤
rз выполняется.
Расчет заземления выполнен верно.
Занулением называется преднамеренное
металлическое соединение частей электроустановок, нормально не находящихся под
напряжением, с заземленной нейтралью трехфазного генератора или трансформатора,
или с заземленным выводом источника однофазного тока, или с заземленной средней
точкой источника в сети постоянного тока. Эти заземленные точки часто называют
нулевыми, а проводники, которые от этих точек отходят нулевыми проводниками.
Нулевые рабочие проводники используют для
питания электроприемников, а нулевые защитные проводники - для зануления.
Разрешается применять нулевой рабочий проводник в качестве защитного.
Магистральным нулевым защитным проводником
называется такой, у которого имеются два или более ответвлений к зануляемым
частям электроприемников.
11.2 Охрана природы
Охрана природы - это разработка и осуществление
мероприятий по охране окружающей среды, рациональному использованию и
воспроизводству природных ресурсов.
Разрушение сложившихся систем и взаимосвязей в
биосфере Земли может быть следствием распашки земельных массивов, использования
земель под пастбища, вырубки лесов, сооружение плотин и каналов, применение
удобрений и ядохимикатов. Каждое предприятие должно выполнять некоторые требования
по охране труда. Так, например каждое предприятие должно быть ограждено и по
периметру обсажено большекронными деревьями. В ООО «Птицефабрика
«Колмогоровский бройлер» это требование выполнено частично, так как оно только
с одной стороны защищено деревьями.
Огромную роль в охране природы играет
переработка и утилизация помета.
Птичий помет - высококонцентрированное и
быстродействующее удобрение, которое можно применять на любых почвах и под все
сельскохозяйственные культуры. Поскольку вносить помет в почву можно только в
определенный период года, возникает необходимость хранения его в специальных
хранилищах. Важно четко установить сроки хранения помета и время его
использования. Сроки внесения помета обуславливаются агротехническими
требованиями, почвенными и погодными условиями, местными особенностями,
указаниями санитарно-гигиенической службы и работников водного хозяйства. Так,
нельзя вносить помет в мерзлую почву, непосредственно примыкающую к водным
источникам, так как возможно их загрязнение пометными массами при поверхностном
стоке воды.
При организации хранения помета соблюдены
санитарные нормы и охрана окружающей среды, созданы благоприятные
технологические условия для транспортировки, погрузки помета и внесения его в
почву при наименьших затратах.
Помет птицы, полученный после термической
переработки, хранят в специальной таре или насыпью в закрытых
гидроизолированных помещениях.
12. Экономическое обоснование
В данном дипломном проекте предлагается
модернизация отдельных установок на базе существующих машин и агрегатов в ООО
«Птицефабрика «Колмогоровский бройлер».
Целесообразность автоматизации технологических
процессов определяется расчетом экономической эффективности, который
производится по технико-экономическим показателям предприятия в расчетном году.
Достоверность определения экономического эффекта во многом зависит от методики
его расчета и правильности выявленных внутрипроизводственных резервов
(увеличение производительности оборудования, уменьшение потерь, энергозатрат и
др.), реализация которых возможна с помощью автоматизации.
Для определения экономического эффекта сравним
затраты двух САУ - контактно-релейной и микропроцессорной.
) Определим затраты при использовании
контактно-релейных схем управления:
Определим затраты на электроэнергию:
Сэ1=Tс ∙Дг∙Тээ∙∑Рн∙Кз/η,
где Тс - часов в сутки-24ч; Дг
- дней вгоду-365; Тээ - тариф на электроэнергию-1,82р; ∑Рн
- номинальная мощность-2,3кВт; Кз - коэффициент загрузки-0,3; η
- КПД установки-1.
Сэ1= 24 ∙365∙1,82∙2,3∙0,3/1=11000,8
руб.
Затраты на обслуживание (ремонт, ТО), следуя из
отчетных данных, будут равны Зо1=7837 руб.
) Определим затраты при использовании новой САУ:
Для определения стоимости оборудования
составляем смету.
Таблица 12.1 -
Смета оборудования
|
Наименование
|
Ед.
измерения
|
Кол.
|
Стоимость,
р.
|
Сумма,
р.
|
|
PCL
-735
|
шт.
|
1
|
3750
|
3750
|
|
Промышленная
рабочая станция.
|
шт.
|
1
|
45880
|
45880
|
|
Итого:
|
49630
|
Определим общие затраты.
Затраты на монтажные работы (Ко -
стоимость оборудования):
Км=0,2∙Ко,
Км=0,2∙49630=9926 руб.
Затраты на транспортные работы:
Кт=0,1∙Ко.
Кт=0,1∙49630=4963 руб.
Затраты на проектирование:
Кп=0,015∙(Ко+Км+Кт).
Кп=0,015∙(49630+9926+4963)=967р.
Итого капиталовложений:
К=Км+Кт+Кп.
К=49630+9926+4963+967=65468 руб.
Определим затраты на электроэнергию:
Сэ2=Tс ∙Дг∙Тээ∙∑Рн∙Кз/η,
где Тс - часов в сутки-24ч; Дг
- дней вгоду-365; Тээ - тариф на электроэнергию - 1,82 руб.; ∑Рн
- номинальная мощность-0,64кВт; Кз - коэффициент загрузки-0,3; η
- КПД установки-1.
Сэ2= 24 ∙365∙1,82∙0,64∙0,3/1=3061,09
руб.
Затраты на обслуживание:
Зо2=7837/1,5=5224,7 руб.
Рассчитаем экономию от внедрения новой САУ:
Экономия затрат электроэнергии:
Ээл=Сэ1 - Сэ2.
Ээл=11000,8 - 3061,09=7939,7 руб.
Экономия затрат на обслуживание:
Эо=Зо1-Зо2.
Эо=7837 - 5224,7=2612,3 руб.
Рассчитаем срок окупаемости:
=К/∑Э,
где К - капиталовложения; ∑Э -
экономия.=65486/10552=6,2лет.
Таблица 12.2 -
Расчетные данные
|
Наименование
|
Промышленная
рабочая станция
|
PCL
-735
|
Экономия
(р.)
|
|
Затраты
на электроэнергию (р.)
|
11000,8
|
3061,09
|
7939,7
|
|
Затраты
на обслуживание (р.)
|
7837
|
5224,7
|
2612,3
|
|
ИТОГО
|
18837,8
|
8285,8
|
10552
|
Следовательно, при внедрении новой САУ
процессами в птичнике, значительно снизились энергозатраты, затраты на
обслуживание и трудоемкость, повысилась надежность электрооборудования.
Срок окупаемости составил 6 лет, что является
вполне приемлемым, поэтому проект является экономически выгодным.
Таким образом, при установке нового
оборудования, мы предполагаем снижение смертности падежа птицы, что даст
возможность увеличения прибыли предприятия, а, значит, в свою очередь,
уменьшится и срок окупаемости вложений.
Заключение
В данном дипломном проекте рассмотрен вопрос
улучшения управления, регулирования и контроля процессами в птичнике путем
использования новой системы автоматического управления и регулирования, их
параметров на базе микропроцессорной техники. Рассмотрены вопросы, связанные с
влиянием новейшей микропроцессорной техники на производительность процессов
уборки помета, кормораздачи, микроклимата и других параметров, необходимых для
качественного содержания птицы.
Произведены анализ систем САУ и оборудования для
создания экономичности, расчеты освещения, вентиляции, отопления, выбор и
расчет пускозащитной аппаратуры. В проекте рассмотрены вопросы, связанные с
безопасностью использования данной разработки и ее экономическая эффективность.
Внедрение данной системы в производство позволит
значительно улучшить условия производства, уменьшить затраты на содержание
производства, исключит необходимость постоянного контроля за состоянием
оборудования со стороны обслуживающего персонала. Предлагаемая САУ окупается за
срок 6 лет и является вполне доступной в плане капитальных вложений для ООО
«Птицефабрика «Колмогоровский бройлер».
электрификация птичник автоматизация
освещение
Библиографический список
1. Акимцев Ю.И. Электроснабжение
сельского хозяйства. - М.: Колос, 1994.
. Бородин И.Ф., Судник Ю.А.
Автоматизация технологических процессов. - М.: Колос. 2004.
. Герасимович Л.С.
Электрооборудование и автоматизация сельскохозяйственных агрегатов и установок.
- М.: Колос, 1990.
. Журбин Б.Г. Вентиляторы
сельскохозяйственных машин. - М.: Колос, 1990.
. Живописцев Е.Н., Косицын О.А.
Электротехнология и электрическое освещение. - М.: Агропромиздат, 1990.
. Зайцев А.Г. Механизация
производственных процессов в сельском хозяйстве. - М.: Колос, 1984.
. Каганов И.Л. Курсовое и дипломное
проектирование. - М. Агропромиздат, 1990.
. Комаристов В.Е.
Сельскохозяйственные машины. - М.: Колос, 1984.
. Кудрявцев И.Ф. Электрооборудование
сельскохозяйственных машин и агрегатов. - М.: Агропромиздат, 1988.
. Луковников А.В. Охрана труда. -
М.: Агропромиздат, 1990.
. Макевин С.Г. Охрана труда. - М.:
Агропромиздат, 1991.
. Олейников И.Г. Агрегаты и
комплексы. - М.: Колос, 1977.
. Пастлов А.А. Эксплуатация и ремонт
электрооборудования и средств автоматизации. - М.: Колос, 1993.
. Стародубцев В.А. Должностные
обязанности специалистов колхоза. - М. Росагропромиздат, 1989.