Разработка системы управления
Содержание
Введение
. Цель работы
.1 Задание на
курсовую работу
. Анализ
исходной системы
.
Исследование влияния корректирующих элементов СУ
. Расчет
устойчивости Гурвица
5. Моделирование переходных процессов
6. Задание
варьируемого параметра как глобального
.
Формирование локальных критериев оптимизации
.
Исследование устойчивости СУ
Заключение
Введение
Аналитические исследования целого ряда проблем,
которые относятся к предмету теории управления, можно обнаружить еще в работах
И. Ньютона, Л. Эйлера, Ж. Лагранжа и других известных ученых, а история
искусственных регуляторов и автоматически действующих систем самой
разнообразной физической природы восходит к началам цивилизации. Тем не менее,
возникновение теории управления (регулирования) как самостоятельной науки
принято связывать с первыми публикациями в этой области Дж.К. Максвелла («On Governors», 1868) и И.А. Вышнеградского («Об
общей теории регуляторов», 1876), предложивших научное обоснование некоторых
проблем устойчивости динамических систем.
В середине ХХ века развитие технического оснащения
всех отраслей человеческой деятельности, усложнение процессов, подлежащих
управлению, и повышение требований к качеству автоматических систем привело к
изменению облика теории управления. В этом немалую роль сыграли кибернетика и
развитие средств вычислительной техники. Кибернетика как наука о связи и
управлении, выдвигающая на передний план информационную сторону исследуемых
динамических систем (в противовес их физическим особенностям), инициировала
новый взгляд на процессы управления как процессы обмена и обработки информации.
Это сразу же выявило необходимость более интенсивного развития математического
аппарата для их описания и удобство временных методов исследования систем.
Повышенное внимание, уделяемое аналитическому (математическому) описанию
динамических процессов, является ключевой особенностью современной теории
управления как науки, впитавшей в себя целый ряд подходов, развитых ранее в
механике и математике (работы Ж. Лагранжа, Л. Эйлера, В.Р. Гамильтона, А.
Пуанкаре, А.М. Ляпунова и многих других).
Интенсивное развитие во второй половине ХХ века
вычислительной техники и информатики предоставило необходимый технический
аппарат для реализации сложных алгоритмических процедур и практической
организации совершенных процессов управления сложными системами, а развитие
робототехники, механотроники и других инженерных дисциплин - широкую базу
внедрения теории в практику электромеханических и физических систем нового
поколения.
Теория автоматического управления ХХI века является основной
кибернетической дисциплиной, тесно связанной с новейшими достижениями
математики и информатики.
Системы управления автоматизированным производством, системами,
представляются объектами, способными к автоматической адаптации относительно
окружающей среды и условий эксплуатации.
1. Цели работы
Освоить отдельные понятия и вопросы теории управления
(корректирующие элементы, структурно-неустойчивые системы, жесткие и гибкие
обратные связи в качестве корректирующих элементов, введение в закон
регулирования производных и интегралов, применение астатических звеньев в
качестве корректирующих элементов; оптимальный переходный процесс; критерий
оптимальности; интегральные методы оценки качества систем);
закрепить навыки работы с ПК «МВТУ»; методику
определения устойчивости систем управления (СУ) с помощью частотных и
алгебраических критериев устойчивости; методику параметрической оптимизации СУ
на примерах линейных СУ;
получить практические навыки программной реализации
алгоритмов управления.
.1 Задание на курсовую работу
Структурная схема исходной СУ представлена на рисунке 1

Рисунок
1 - Структурная схема СУ
2. Анализ исходной системы
Объект управления с передаточной функцией W2(р) соответствует
типовому колебательному звену с параметрами: k1 = 5; k2 =
10; T2 = 2.5. Местная обратная связь с передаточной функцией W3(р)
соответствует типовому апериодическому звену 1-го порядка с параметрами k3
= 1; T3 = 4. Локальное сравнивающее устройство обеспечивает
отрицательную обратную связь. Структурная схема приведена на рисунке 1.
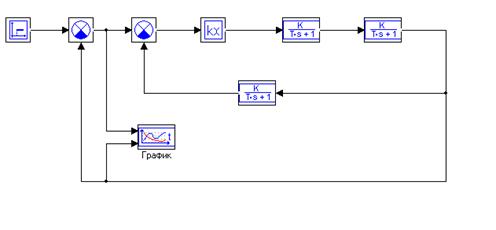
Рисунок 1 - Структурная схема СУ
Моделирование переходных процессов представлено на рисунке 2.
Рисунок 2 - Результаты моделирования
График переходного процесса расходящийся, следовательно, система не
устойчива.
3. Исследование влияния корректирующих элементов СУ
Определим передаточную функцию системы и обозначим вход и выход
анализируемого фрагмента схемы через Y1 и Y2 соответственно. Разомкнем главную
обратную связь, т.к. 2-ой весовой коэффициент в главном сравнивающем устройстве
должен быть равен нулю. Схема представлена на рисунке 3.
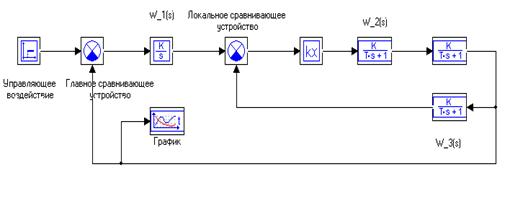
Рисунок 3 - Схема для получения передаточной функции
Результаты расчета передаточной функции представлены на рисунке 4.
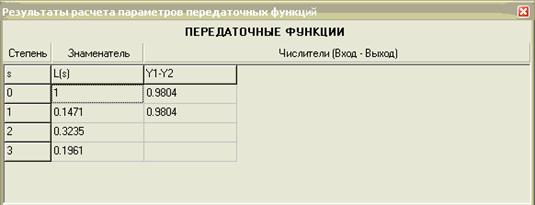
Рисунок 4 - Результаты расчета передаточной функции
Запишем передаточную функцию W(p) разомкнутой СУ:

Вывод: передаточная функция соответствует статической системе, т.к. при
x(t)=const eуст принципиально не равна нулю. В
структурную схему, представленную на рисунке 5, введем интегральный регулятор.
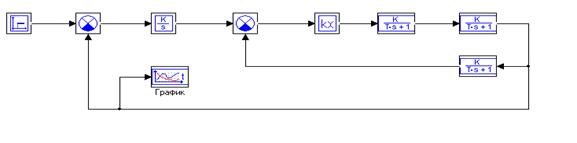
Рисунок 5 - Структурная схема СУ с интегральным регулятором
Рисунок 6 - График структурной схемы СУ с интегральным регулятором
система управление устойчивость гурвиц
4. Расчет устойчивости Гурвица


Характеристическое уравнение:

Строится главный определитель Гурвица и его диагональные миноры
 =
= 
 =
= 
 =
= 
 =
= 
Решение:
 =0.32;
=0.32;  =-0.33;
=-0.33;  = -0.75;
= -0.75;  = 0.21.
= 0.21.
Критерий:
при a0>0 для устойчивости СУ необходимо и достаточно
выполнение условий:  .
.
Критерий
не выполняется, следовательно, СУ неустойчива.
5.
Моделирование переходных процессов
При активной закладке «Основные» выбираем численный метод, например,
Рунге-Кутта 45 модиф. и вводим параметры расчета, представленные на рисунке7.
Рисунок 7 - Параметры расчета
Далее необходимо переместить курсор на командную кнопку «Да» и щелкнуть
левой кнопкой мыши: запускается созданная задача на счет. Выводится сообщение:
«Ошибка: Заданная точность не обеспечивается». Данные расчета показывают, что
внешне вид переходного процесса не изменился при резком уменьшении минимального
шага интегрирования, так как при первоначальном минимальном шаге интегрирования
(0.001) заданная точность не обеспечивалась только на 1-ом шаге моделирования.
Данные расчета свидетельствуют, что при К1 = 1 СУ устойчива и
переходной процесс сходящийся.
6. Задание
варьируемого параметра как глобального
Процедура задания глобального параметра выполняется в окне редактор
глобальных параметров проекта. Необходимо ввести K=1. На рисунке 8 представлена копия окна Редактора Глобальных
параметров.
Рисунок 8 - Редактор глобальных параметров
После необходимо открыть диалоговое окно интегратора и изменить значение
коэффициента усиления с 1 (число) на параметр К (символ).
7.
Формирование локальных критериев оптимизации
Вставим субмодель. Для этого через окно «Открытие субмодели» выберем файл
time_p_p.. Выше описанная схема с измерителем времени ПП представлена на
рисунке 9.
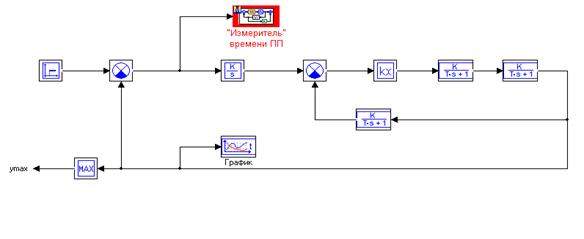
Рисунок 9 - Вид схемного окна
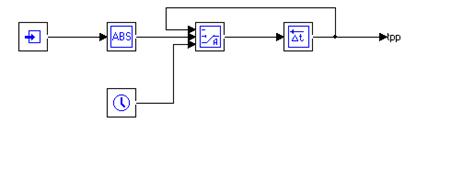
Рисунок 10 - Измеритель времени переходного процесса
В поле «Величина трубки» в 1-ой диалоговой строке изменили 0.05 на 0.04 ,
что соответствует 5 %-ной «трубке». Далее необходимо установить следующие
параметры оптимизации, представленные на рисунке 11.
Рисунок 11 - Параметры оптимизации (Параметры).
Откроем диалоговое окно «Параметры оптимизации», перейдем на вкладку
«Критерии», где необходимо ввести данные, представленные на рисунке 12.
Рисунок 12 - Параметры оптимизации (Критерии)
В меню «Оптимизация» выберем опцию «Расчет»: появилось окно «Результаты
оптимизации», представленное на рисунке 13.
Рисунок 13 - Результаты оптимизации
Выбираем «Применить». Далее в результате моделирования получился график,
представленный на рисунке 14.
Рисунок 14 - График
8. Исследование устойчивости СУ
В Схемное Окно поставили 2 блока «В память» и провели к ним линии связи,
представленные на рисунке 15.
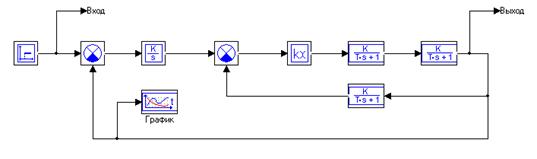
Рисунок 15 - Структурная схема с блоками «В память»
В меню «Анализ» выбрали пункт «Частотный анализ. В открывшемся диалоговом
окне «Параметры частотного анализа» ввели значения первых 3-х параметров,
указанных на рисунке 16.
Рисунок 16 - Параметры частотного анализа
Далее указали характеристики, представленные на рисунке 17.

Рисунок 17 - Параметры частотного анализа.
Выполним расчет частотных характеристик ЛАХ, ФЧХ. Полученные графики
представлены на рисунке 18.
Рисунок 18 - Графики ЛЧХ и ФЧХ
В ячейке Характеристика необходимо выбрать вид годографа - Найквиста и
заполнить таблицу, данные на рисунке 19.
Рисунок 19 - Параметры частотного анализа
Рисунок 20 - Годограф Найквиста
Рисунок 21 - Годограф Михайлова
Вывод: по частотному анализу разомкнутой СУ, представленному на рисунке
21 видно, что линия не охватывает «точку Найквиста» (-1, 0j). Следовательно, исходная СУ в
замкнутом состоянии будет устойчива.
Заключение
В результате работы была разработана СУ.
Произведен анализ исходной схемы, исследование устойчивости и оценки
показателя качества СУ в переходном и установившемся режимах.
Для данной системы было создано корректирующее устройство. Корректирующее
устройство было проанализировано, и включено в цепь с помощью местной обратной
связи. Полученная откорректированная система была проанализирована, она имеет
рекомендуемое время регулирования.
Были построены ЛЧХ и ФЧХ системы, годограф Найквиста.
Была проведена коррекция СУ и ее параметрическая оптимизация при нулевых
начальных условиях и ступенчатом входном воздействии с учетом ограничений.