Измеритель угловых скоростей на основе неортогонально ориентированной гексоды ДУСов с электрическими обратными связями для космического корабля
Диплом
Измеритель угловых скоростей на
основе неортогонально ориентированной гексоды ДУСов с электрическими обратными
связями для космического корабля
Содержание
Аннотацияsummary
Содержание
Введение
Постановка задачи
. Теоретическая часть
.1 Поиск и изучение патентной и
научно-технической литературы
.2 Конструкция и принцип действия прибора ИУС-М
. Математическое моделирование
.1 Математическая модель прибора ИУС-М. Вывод
матрицы направляющих косинусов
.2 Математическая модель ДУС - чувствительного
элемента
. Расчетно-конструкторская часть
.1 Расчет ДУ, ДМ (ДУМ-031)
.1.1 Описание конструкции и основные параметры
ДУМ-031
.1.2 Расчет датчика угла
.1.3 Расчет датчика момента
.2 Расчет потребляемой мощности
.3 Расчет коэффициента демпфирования
.4 Расчет момента инерции поплавкового гидроузла
.5 Расчет масштабного коэффициента и погрешности
масштабного коэффициента прибора
.6 Расчет коэффициента усиления УОС-096
.7 Расчет масштабного коэффициента УОС-096
.8 Анализ частотных характеристик и построение
графиков переходных процессов ДУС
.9 Расчет коэффициентов математического
моделирования
. Разработка блока преобразования информации
.1 Расчет блока преобразования информации
.2 Построение частотных характеристик и их анализ
. Анализ погрешностей ЧЭ ДУС КХ79-060
.1 Методические погрешности
.2 Инструментальные погрешности
. Разработка электрической принципиальной схемы
прибора ИУС-М
.Технологическая часть
. Организационно-экономическая часть
.1 Расчет себестоимости изготовления изделия
после внедрения нового образца
.2 Расчет планируемого уменьшения численности ППП
.3 Расчет прироста прибыли от производства новой
продукции
.4 Расчет годового экономического эффекта от
производства новой продукции
.5 Расчет срока окупаемости дополнительных
капитальных затрат
. Безопасность технологического процесса
.1 Основные положения действующего
законодательства Российской Федерации об охране труда
.2 Правовые основы охраны труда
.3 Профессиональная подготовка кадров, допуск к
самостоятельной работ (обучение профессии и охране труда)
.4 Гигиена труда и производственная санитария
(микроклимат, освещённость, вентиляция, шум, вибрация)
.5 Порядок обеспечения спецодеждой и средствами
индивидуальной защиты
.6 Порядок проведения медицинских осмотров
.7 Понятие ПДК и ПДУ. Их нормирование
.8 Требования к оборудованию и технологическим
процессам
.9 Анализ вопросов безопасности технических
устройств
Заключение
Список использованных источников
Введение
Бесплатформенные инерциальные навигационные системы на пилотируемых
космических объектах впервые были применены РКК «Энергия» в 1974 году. С 1982
года в системе управления космическими аппаратами (КА) «Союз» и «Прогресс»
применяется трехкомпонентный блок поплавковых датчиков угловых скоростей
КХ97-010М, где в качестве инерциального чувствительного элемента используется
ДУС КХ79-060. И блок ДУС, и сам чувствительный элемент были разработаны на ФГУП
«ПО Корпус» г. Саратова. Технические решения, заложенные в ДУС КХ79-060 в плане
электромеханической части, не утратили актуальности и поныне. Однако за
прошедшие годы усовершенствовалась база промышленной электроники, появилась
возможность применения в системе регулирования ДУС импортной элементной базы,
что значительно расширило возможности улучшения как точностных, так и
динамических характеристик прибора. Бурное развитие компьютерной техники,
микропроцессоров создало реальную возможность усовершенствования и резкого
увеличения вычислительных возможностей бортовых ЭВМ, что сделало реальностью
применения на борту КА неортогонально ориентированных блоков инерциальных
чувствительных элементов.
На борту КА «Союз - ТМА» в настоящее время работают в системе управления
три комплекта приборов КХ97-010М (классическая система «троирования»), к
каждому из которых комплектуется блок питания. В связи с этим, было принято
решение модернизировать существующую систему, для чего необходимо разработать
неортогонально ориентированный шестикомпонентный прибор ИУС-М, включающий в
себя две тройки неортогонально ориентированных ДУС (прибор ИУС-А и ИУС-Б),
способные работать как автономно, так и в составе шестикомпонентного блока. В
каждый измерительный канал должен входить ДУС КХ79-060, блок питания и
преобразователь информации (БПИ) аналогового сигнала в унитарный код.
Предлагаемая система позволит значительно уменьшить габаритно - массовые
характеристики, сократить энергопотребление и увеличить вероятность безотказной
работы (с двух отказов до трех). Кроме того, расширенные возможности бортовой
ЭВМ позволят осуществлять идентификацию отказов каналов и определять некорректно
работающий канал. Работа прибора в виде гексоды позволит обеспечить
функционирование в виде 20 троек, 15 четверок, либо 6 пятерок измерительных
каналов, что значительно расширяет возможности системы управления объектом.
Блочный состав прибора ИУС-М позволяет в случае необходимости
раскомплектовывать гексоду на два самостоятельных прибора и применять их в
отдельности, если есть подобная необходимость. В связи с этим, ужесточаются
требования к наземному контролю изделия: должны аттестоваться как прибор ИУС-М,
так и ИУС-А и ИУС-Б с полным комплектом технической документации на каждый
прибор.
Геометрические характеристики ДУС КХ79-060, выполненного в форме
цилиндра, позволяют осуществить оптимальную конструкторскую компоновку прибора.
Решению поставленной проблемы и посвящен настоящий дипломный проект.
Постановка задачи
Необходимо принять участие в разработке
измерителя угловых скоростей (ИУС) для КА на базе поплавковых датчиков угловых
скоростей КХ79-060. В качестве прототипа используется прибор разработки ФГУП
«ПО Корпус»: измеритель угловых скоростей на основе ортогонально
ориентированной триады датчиков угловой скорости с электрической обратной
связью (БДУС
КХ67-010М). В процессе дипломного проектирования должны быть выведены матрицы
направляющих косинусов прибора ИУС-М, уравнения движения ДУС КХ79-60 и
произведен анализ его погрешностей, рассчитаны: основные параметры ДУС, датчик
момента, датчик угла, потребляемая мощность, коэффициент демпфирования, момент
инерции поплавкового гидроузла, масштабный коэффициент ДУС и его погрешность,
масштабный коэффициент и выходное сопротивление УОС-096, проведено
моделирование измерительного канала навигационной системы, а также предложена
методика регулировки масштабного коэффициента датчика угловых скоростей и произведен
расчет основных экономических показателей системы, рассмотрены основные
положения по безопасности технологического процесса.
Разрабатываемая ИУС должна иметь 6
измерителей угловой скорости, представлять собой две тройки неортогонально
ориентированных ДУС (прибор ИУС-А и ИУС-Б) и удовлетворять следующим
техническим характеристикам:
1. Каждая тройка должна выдавать: в систему телеизмерения (СТИ):
формировать информацию об измеряемой угловой скорости в диапазоне от минус 3 до
плюс 3 /с;
. Номинальные положения каждой из трех осей чувствительности ИК приборов
ИУС-А и ИУС-Б должны совпадать с образующей конуса с углом полураствора 0,
равным .
. Номинальные значения углов i измерительных каналов должны быть:
1 = 00, 2 = 600, 3 = 1200, 4 = 1800, 5
= 2400, 6 = 3000,
. Фактическое угловое положение осей чувствительности относительно
опорной плоскости YпОZп задается в формуляре на измеритель ИУС-М углами 1
- 6. Номинальные значения этих углов 3501552
(разность между 900 и номинальным значением угла полураствора конуса 0
= 5404408);
. Допустимые отклонения i и i не
должны превышать 6.
. Линейный диапазон измеряемых проекций вектора абсолютной угловой
скорости ИКi должен быть от минус 12 до плюс 12 /с.
. При угловой скорости по модулю от 10 до 60 /с измеритель ИУС-М
должен обеспечивать правильное формирование знака угловой скорости с амплитудой
выходного сигнала не меньше величины сигнала, соответствующего 10 /с.
. Масштабный коэффициент выходного сигнала ИКi должен находиться в пределах
(11,5)0,01% "/импульс.
. Систематическая составляющая смещения нуля ИКi, не зависящего от
перегрузки, не должна превышать по модулю вместо 1 /ч и должна быть
паспортизована в виде константы.
. Случайная составляющая смещения нуля ИКi (3 СКО), не зависящего от
перегрузки, в запуске до 24 ч по отношению к среднему значению в этом запуске
не должно превышать 0,2 /ч (0,3 /ч) при времени осреднения не
более 100 с.
. Случайная составляющая смещения нуля ИКi, не зависящего от перегрузки,
от включения к включению не должна превышать 0,6 /ч при времени
осреднения не более 100 с.
. Амплитуда переменной составляющей выходного сигнала ИКi при отсутствии
входной угловой скорости не должна превышать 0,001 /с..
. Систематическая составляющая погрешности ИКi, пропорциональная
перегрузке n, не должна превышать по модулю и должна быть паспортизована.
. Полоса пропускания измерительного канала по уровню 0,7 должна быть не
менее 20Гц.
. Мощность не более 30 Вт.
. Масса 15 кг.
. Измеритель ИУС-М должен запитываться от источника постоянного тока
напряжением в пределах от 23 до 34. В при номинальном напряжении 27 В.
1. Теоретическая
часть
1.1 Поиск и изучение
патентной и научно-технической литературы
Необходимость создания бесплатформенных
систем для угловой ориентации космических аппаратов (КА) возникла в 80-е годы,
прежде всего для решения задачи управления угловыми эволюциями КА в любом
заданном направлении без ограничения величины угловых поворотов. Решение этой
задачи стало возможным только после внедрения на борту КА вычислительного
комплекса и разработки математических методов преобразования информационных
сигналов, снимаемых с измерительных осей, жестко связанных с КА, в инерциальную
систему координат. Гироскопические приборы, положенные в основу построения бесплатформенной
системы, получили название гироскопические измерители вектора угловой скорости.
Переход к бесплатформенным системам
потребовал от разработчиков гироскопической техники решения целого ряда
проблем. В первую очередь, это создание высокоточного чувствительного элемента
- гироблока (ГБ), способного при минимальном дрейфе нуля, порадка 10-2
град/ч, производить измерения угловых скоростей до 5 - 10 град/ч с высокой
стабильностью масштабного коэффициента (до 10-5 - 10-6).
Также необходимо было избавиться от
влияния появившихся в опорах гироскопов сил реакции от гироскопического
момента, возникающего при угловых эволюциях КА. Потребовалось также проведение
исследовательских работ, направленных на изучение сохранения работоспособности
датчика после воздействия на него вибрации и ускорений на участке выведения КА
на орбиту.
При разработке конструкции приборов
пришлось решать серьезные проблемы по минимизации массы и габаритов,
обеспечению теплового комфорта для элементов прибора и др.
В качестве чувствительных элементов в БИНС
могут применяться различные типы гироскопов, как с механическим носителем
вектора кинетического момента (роторные), так и использующие измерение
параметров различных электромагнитных процессов (лазерные (ЛГ),
волоконно-оптические (ВОГ), твердотельные волновые (ТВГ) и т.д.).
Естественно, выбор тех или иных
чувствительных элементов (ЧЭ) для БИНС определяется точностными и
эксплуатационными требованиями, предъявляемыми к системе в целом. Здесь, чтобы
не анализировать все возможные сочетания этих требований, условно разделим
гироскопические ЧЭ, используемые в ИИМ, на три группы.
К первой отнесем НГ с электростатическим
подвесом ротора и бескардановой системой списывания углового положения и ЛГ.
Объединяющим признаком для этих, весьма далеких по своим физическим основам
приборов, является эксклюзивность применения в БИНС и высокая стоимость.
Третья группа может быть объединена по
признакам сравнительно низкой стоимости и выработки информации только для
решения задачи управления (углы и угловые скорости движения объекта
относительно центра масс). Задача навигации при этом решается иными,
неинерциальными, средствами в составе БИНС. Сюда следует отнести гироскопы с
уходами от единиц до сотен градусов в час (большинство видов гироскопов с шарикоподшипниковыми
опорами, микромеханические гироскопы и т.д.)
Наконец, наиболее интересующая нас, самая
распространенная группа - это вторая группа - гироскопические ЧЭ средней
точности 0,02-0,3 град/ч, предназначенные для БИНС, вырабатывающих информацию для
решения навигационной задачи. Роторные (с механическим носителем вектора
кинетического момента) гироскопы в классе систем средней и более высокой
точности достаточно распространены, причем крупнейшие компании по-прежнему
сосредоточивают усилия главным образом на двух их типах: поплавковых ДУС и ДНГ.
Примеры применения роторных ДУС и особенно ДНГ в космических ГИВУС
(гироскопический измеритель вектора угловой скорости) хорошо известны [2].
Также роторные ДУС применяются во системах подземной навигации, В авиационных
ИСОН и др.
Разработки в России
НИИ прикладной механики имени акад. В.И.
Кузнецова за последние 20 лет создано целое поколение бесплатформенных
инерциальных блоков (БИБ), что обеспечило решение многих научных,
народно-хозяйственных и прикладных задач в космосе. Впервые в отечественной
космонавтике БИБ был применен для управления пилотируемой космической станцией
«Мир» и успешно на ней работал все время ее существования с 1986 по 2001 гг.
Всего было изготовлено свыше 70 образцов 7 различных модификаций БИБ для 25
космических объектов различного назначения. В настоящее время 9 приборов
БИБ разных модификаций успешно продолжают свою работу на двух модулях
международной пилотируемой космической станции «Альфа», спутнике связи
«Ямал-100», спутнике прикладного назначения «Аркон», российско-французском
спутнике «Sesat», китайских спутник серии «Ресурс». Готовятся к выводу на орбиту
спутники связи «Ямал-200» и целая группа спутников «Экспресс-АМ». Ключевым
элементом БИБ является чувствительный элемент - двухстепенный поплавковый
интегрирующий гироблок с газодинамической опорой подвеса ротора.
Основными конструкционными особенностями
поплавкового гироблока (ПГБ) являются:
- применение газодинамической опоры
подвеса ротора гироскопа;
- магнитное центрирование поплавковой
камеры гироблока;
- полная симметрия конструкции.
Газодинамические опоры при скорости
вращения ротора 30000 об/мин, а также магнитное центрирование поплавковой
камеры обеспечивают полное отсутствие «сухого» контакта между ротором и
камерой, между камерой и корпусом гироблока. Этим же обеспечивается высокая
стабильность взаимного расположения элементов датчика момента. Тем самым
достигается наивысшая точность и практически неограниченный ресурс работы
гироблока.
В целом, во всех конструкциях БИБ были
применены 3 модификации ПГБ, разработанные в НИИ ПМ - КИ99-110, КИ79-132,
КИНД99-003, фотографии которых представлены на рис. 1.1.1.
График на рис. 1.1.2 показывает этапы совершенствования
основных характеристик ПГБ: точность в итоге удалось повысить на порядок,
притом что масса была снижена вдвое. Модификация ПГБ КИНД99-003 имеет
показатель отношения величины диапазона измеряемой угловой скорости к
«чувствительности», близкий к 106 , что характеризует его как
измерительный прибор класса высокопрецизионной точности.
В приборах БИБ имеет место большое
разнообразие в построении его кинематической схемы. Первоначально БИБ имели в
своем составе минимально необходимое число измерителей, т.е. три, с
классической ортогональной схемой расположения осей чувствительности
гидроблоков.
Естественным развитием БИБ с целью
повышения отказоустойчивости минимальными аппаратными затратами стало
использование функциональной избыточности. Так, введение дополнительного
четвертого измерительного канала БИБ позволило обеспечивать его
работоспособность при одном отказе. Факт отказа устанавливается автономно, а
идентифицируется при использовании других измерительных средств КА.

Вариант построения кинематической схемы
прибора с четырьмя измерительными каналами представлен на рис.1.1.3.
Эту схему имеет большинство приборов,
разработанных в последние годы, а именно КИНД34-020, КИНД34-027, КИНД34-027-01.
Оси чувствительности 4-х ПГБ направлены по
диагоналям куба, что обеспечивает их равномерное расположение в пространстве.
Такая кинематическая схема дает равную чувствительность к отказам любого измерительного
канала и предпочтительна с точки зрения обработки и диагностики информации.
Для повышения отказоустойчивости и решения
проблемы автономной локализации отказов используют БИБ с числом измерительных
каналов пять или шесть.
Так, разработанные в НИИ ПМ приборы
КИНД34-011 и КИНМ34-002 построены на базе шести измерительных каналов с
неортогональной ориентацией осей чувствительности гидроблоков.
Основные технические характеристики
приборов БИБ, изготовленных в НИИ ПМ, и фотографии некоторых образцов приведены
на рис. 1.1.4 и в табл. 1.1.1.


Рис. 1.1.4. Образцы приборов БИБ.
Таблица 1.1.1 Технические характеристики приборов БИБ
|
Характеристики БИБ
|
Модификации БИБ
|
|
КИ34-2А
|
КИНД 34-020
|
КИНД 34-027
|
КИНМ 34-001
|
КИНМ 34-002
|
КИНД 234-011
|
КИНД 34-027-01
|
|
Год создания
|
1985
|
1997
|
1999
|
1999
|
1999
|
2002
|
2002
|
|
Головное предприятие
|
«Энергия», ГКНЦ им.
Хруничева
|
РКК «Энергия»
|
НПО ПМ
|
КНР
|
КНР
|
НПО им. Лавочкина
|
НПО ПМ
|
|
Число измерительных каналов
(гидроблоков)
|
3
|
4
|
4
|
3
|
6
|
6
|
4
|
|
Диапазон, град/с
|
6
|
0,5
|
0,5
|
1,0
|
0,5
|
0,08
|
0,04
|
|
Масштабный коэффициент
(дискрет информации), угл.с
|
2,2
|
0,036
|
0,040
|
0,3
|
0,07
|
0,008
|
0,04
|
|
Стабильность масштабного
коэффициента, %
|
0,03
|
0,005
|
0,005
|
0,03
|
0,01
|
0,02
|
0,005
|
|
Стабильность нулевого
сигнала, град/ч
|
0,03
|
0,003
|
0,003
|
0,01
|
0,01
|
0,01
|
0,003
|
|
Стабильность ориентации
измерительных осей, угл. с
|
60
|
30
|
30
|
45
|
30
|
30
|
30
|
|
Ресурс, ч
|
30000
|
100000
|
100000
|
50000
|
100000
|
100000
|
100000
|
|
Масса, кг
|
32
|
12,5
|
13,5
|
14
|
21
|
20
|
13,5
|
Сравнение БИБ с зарубежными
аналогами
Одна из последних модификаций БИБ -
КИНД34-020 - по всем основным параметрам является лучшим в России
представителем прецизионных измерителей угловой скорости, предназначенных для
бесплатформенных инерциальных систем КА.
Таблица 1.1.2 Сравнительная характеристика
БИБ КИНД34-020 и инерциального блока RSU

В табл. 5.1 приведены основные технические
параметры приборов КИНД34-020 и инерциального блока RSU, созданного в США для
системы управления космическим телескопом «Хаббл» (официальный пресс-кит NASA называет хаббловские
гироскопы наиболее точными в мире).
По имеющимся данным, Франция, Германия,
Япония, КНР приборов класса высокоточных БИБ не производят, т.к. не располагают
соответствующими прецизионными чувствительными элементами.
Сравнительный анализ имеющейся информации
по бесплатформенным инерциальным блокам, созданным за рубежом, показывает, что
по основным своим параметрам прибор КИНД34-020 не только не уступает зарубежным
аналогам прибора, но и во многом превосходит их. Кроме того, отечественный БИБ
стоит существенно дешевле зарубежных аналогов.
Все это свидетельствует о высокой
конкурентоспособности отечественных БИБ.
Избыточные системы с чувствительными элементами, основанными
на других физических принципах.
Применяются и другие типы чувствительных элементов. Так в статье
«Разработка конфигурации бесплатформенного инерциального блока с избыточным
количеством чувствительных элементов» с целью обеспечения высокой надежности
измерения в условиях отказа отдельных датчиков, максимальной точности оценки
параметров движения, удобства и уменьшения времени калибровки прибора
предлагается применить конструкцию основания БИБ в виде усеченной правильной
шестиугольной усеченной пирамиды, на боковых гранях которой размещены
чувствительные элементы - микромеханические вибрационные гироскопы-акселерометры.
Для калибровки одного чувствительного элемента необходимо задать его оси
чувствительности две ориентации (“вверх”, “вниз” - для акселерометров), для
калибровки блока с тремя четырьмя, пятью, шестью чувствительными элементами
достаточно также задать всего две ориентации блока, что позволит откалибровать
все датчики сразу. Это сократит время калибровки во столько раз, сколько БИБ
содержит чувствительных элементов, и тем самым уменьшит стоимость прибора.
Northrop Grummans
SIRU-Core (рис.1.1.5) является непосредственно избыточным
инерциальным отсчетным блоком (ИОБ) разработанным для проведения непрерывных
высокоточных измерений в космосе в течении долгого периода времени. Один блок
SIRU обеспечивает полную избыточность, состоит из четырех полусферических
резонаторных гироскопов (ПРГ), двух модулей датчика электроники и двух
источников питания. Совокупность ультравысокой высокой надежности ПРГ,
использование высоконадежной электроники и сохранение работоспособности прибора
при отказе отдельных элементов позволяет SIRU непрерывно работать более чем 15
лет в космосе с предполагаемой надежностью 0.995. Grummans SIRU-Dual String [5]
(рис.1.1.6) состоит из двух идентичных 3-осных ИОБ в одном корпусе и
применяется в космических кораблях. Избыточность управляется компьютером
космического корабля, включая обнаружение ошибки.

Рис.1.1.5.
SIRU-Core Рис.1.1.6. SIRU-Dual String
Измеритель угловой скорости [6] (рис.1.1.7) на основе
волоконно-оптического гироскопа в комплекте с кварцевыми акселерометрами фирмы
«Антарес» представляет собой четырехканальную бесплатформенную инерциальную
систему ориентации и навигации с оптимальным расположением чувствительных
элементов, собственным бортовым компьютером и магистральным каналом обмена с
аппаратурой системы управления движением КА.

Рис.1.1.7. Измеритель угловой скорости
В заключение, хочу сказать, что, не смотря на огромное разнообразие ЧЭ,
“поплавковый гидроблок сохраняет перспективу из-за уникального сочетания
наивысших показателей во всем основным параметрам точности (дрейф нуля,
стабильность масштабного коэффициента, чувствительность, низкая шумовая
составляющая) в сочетании с ресурсом (до 15 и более лет)”.
1.2 Конструкция и принцип действия
прибора ИУС-М
Блоки с избыточным числом инерциальных датчиков, защищенные от
ограниченного числа неисправностей, используются в настоящее время в целом ряде
космических систем. Ожидается, что данная система заменит на борту КА «Союз -
ТМА» в системе управления использующиеся в настоящее время три комплекта
приборов КХ97-010М (классическая система «троирования»). Это позволит снизить
стоимость системы и повысит ее эффективность. Важным моментом является возможность использования в ИУС-М электронных
устройств, обеспечивающих формирование выходного сигнала с заданной точностью и
выдачу их соответственно в БЦВМ и систему телеизмерения.

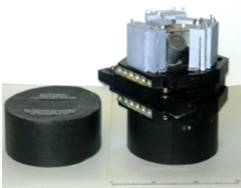
Рис.1.2.1. Общий вид прибора ИУС-М
При разработке измерительной системы для
формирования дискретного выходного сигнала применяется датчик первичной
информации с аналоговым контуром обратной связи и преобразованием типа
«напряжение - цифровой код» (ПНК) для формирования дискретного выходного сигнала.
Преобразование сигнала в этом случае позволяет использовать в цепи обратной
связи аналоговый усилитель обратной связи, схемные решения которого достаточно
хорошо отработанны. Кроме того, формирование аналоговых сигналов не вызывает
технических затруднений.
Учитывая универсальность настроек входных
каскадов данного блока преобразования информации примем единую схему БПИ для
всех измерительных каналов.
В соответствии с требованиями технического
задания, разрабатываемый аналоговый усилитель обратной связи в цепи «ДУ-ДМ»
измерительных каналах ДУСов обеспечивает астатический режим работы привода по
углу прецессии. Такой контур обратной связи существенно снижает влияние на
работу прибора перекрестных связей.
Измеритель угловых скоростей выполнен в
виде двух неортогональных троек чувствительных элементов, объединенных в общем
корпусе и электронных блоков, обеспечивающих его работу. Прибор содержит три
группы чувствительных элементов и электронных блоков.
Измерительных канал предназначен для
измерения проекций векторов абсолютных угловых скоростей объекта на
соответствующие оси, связанные с объектовой системой координат, и формирования
дискретных и аналоговых выходных сигналов.
В состав измерительного канала входят:
чувствительный элемент - гироскопический поплавковый двухстепенный датчик
угловой скорости; аналоговый усилитель обратной связи, обеспечивающий
формирование тока обратной связи в датчике момента ДУСа и выдачу в систему
управления аналогового выходного сигнала в виде напряжения постоянного тока, о
величине и знаке которого можно судить о входной угловой скорости; блок
преобразования информации (БПИ), обеспечивающий формирование дискретного
выходного сигнала в виде унитарного кода о величине и знаке тока обратной связи
в датчике момента, первичный источник питания (ПСП) и вторичный источник
питания (ВИП).
Блок БПИ представляет собой
преобразователь типа “напряжение- цифровой код”.
Блок БКУ предназначен для формирования
сигналов компенсации систематических составляющих скорости дрейфа ДУСов, не
зависящих от ускорения.
Источник вторичного напряжения (ВИП)
обеспечивает питание электронных блоков, а так же питание схемы формирования
тестового смещения и сигнала компенсации систематической составляющей скорости
дрейфа ДУСов, не зависящих от ускорения (БКУ).
Питание БИНС осуществляется от бортового
источника постоянного напряжения 27В.
Датчиком первичной информации канала
измерения угловой скорости является поплавковый датчик угловой скорости.
Датчик угловой скорости предназначен для
измерения угловой скорости объекта вокруг одной из его координатных осей и
выдачи электрического сигнала, пропорционального по величине и соответствующего
по знаку угловой скорости. Датчик угловой скорости представляет собой
поплавковый двух степенной ДУС с гидроузлом с прецизионными опорами и
комбинированным датчиком угла и датчиком момента.
Внутренняя полость заполнена вязкой
жидкостью Бл-П ТУ6-01-935-74, которая снимает трение в опорах и демпфирует
гидроузел.
Наружная цилиндрическая поверхность
корпуса поплавкового гироузла и внутренняя поверхность корпуса имеют 12
продольных выступов, осуществляющих лопастное демпфирование.
За счет этого существенно увеличился
коэффициент жидкостного демпфирования при сравнительно небольшой вязкости
поддерживающей жидкости по сравнению с традиционным демпфированием с помощью
гладких цилиндров.
Изменение температуры компенсируется
сильфоном.
В приборе (рис.1.2.2) установлены:
индукционный датчик угла и магнитоэлектрический датчик момента, конструктивно
объединенные в одну сборку ДУМ-036, обмотка возбуждения ДУ, постоянный магнит и
магнитопровод расположены на неподвижной части прибора - крышке. Магнитопровод
является общим, как для датчика угла, так и для датчика момента.
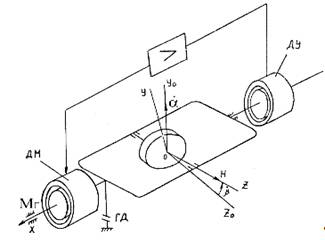
Рис 1.2.2. Схема датчика угловой скорости с электрической
пружиной: ДУ - датчик угла; ДМ - датчик момента; ГД - гидравлический демпфер,
Х0Y0Z0 - оси, связанные с
корпусом; Y,
Z - оси, связанные с
рамкой
Сигнальная обмотка ДУ, обмотка управления и обратной связи ДМ
расположены на одном корпусе ротора комбинированного датчика угла и момента в
торцевой части гидроузла.
Принцип действия датчика угловой скорости
основан на свойстве двухстепенного гироскопа: совмещать вектор кинетического
момента Н с вектором входной угловой скорости  .
.
При действии угловой скорости на двухстепенный
гироскоп возникает гироскопический момент Мг, вектор которого
направлен по оси подвеса рамки, а величина определяется отношением:
 .
.
Под действием гироскопического момента Мг
рамка с гиромотором будет поворачиваться вокруг ОХ в направлении, указанном
стрелкой, пока векторы Н и не совпадут.
Повороту гидроузла препятствуют:
Упругий момент, пропорциональный углу
поворота гидроузла, создаваемый электрической пружиной.
Демпфирующий момент, пропорциональный
угловой скорости поворота гидроузла (лопастное демпфирование).
Инерционный момент, пропорциональный
угловому ускорению гидроузла относительно его оси вращения.
Момент помех (момент трения, момент
тяжения и др.).
Уравнение движения с точностью до момента
помех:
 (1.2.1)
(1.2.1)
где I - момент инерции
поплавкового гидроузла относительно оси ОХ;
b - коэффициент
демпфирования, удельный демпфирующий момент;
k - жесткость
электропружины;
 - угловое ускорение
гидроузла относительно корпуса прибора;
- угловое ускорение
гидроузла относительно корпуса прибора;
 - угловая скорость
гидроузла относительно корпуса прибора;
- угловая скорость
гидроузла относительно корпуса прибора;
 - угол поворота
гидроузла относительно корпуса прибора.
- угол поворота
гидроузла относительно корпуса прибора.
Принцип работы:
При воздействии на прибор угловой скорости
гидроузел придет в движение, и будет поворачиваться, жестко связанный с ним,
ротор датчика угла.
В результате поворота в обмотках ДУ
появится электрическое напряжение, величина и фаза которого зависят от величины
угла и направления поворота гидроузла относительно нулевого положения.
Это напряжение поступает на вход
фазочувствительного усилителя, где усиливается и преобразуется в постоянный
ток, величина и полярность которого определяются величиной и фазой сигнала
датчика угла.
В цепь нагрузки усилителя включена обмотка
датчика момента, жестко связанная с гидроузлом.
При протекании по обмоткам ДМ тока
определенной величины и полярности, возникает момент, который накладывается на
гироузел.
Величина этого момента пропорциональна
току усилителя, и, следовательно, по величине и полярности тока можно
определить величину и направление угловой скорости.
В общем случае этот момент определяется
выражением:
 (1.2.2)
(1.2.2)
Или
 (1.2.3)
(1.2.3)
где Мпр -
противодействующий момент;
k1 - крутизна
характеристики датчика момента;
i - ток в обмотке датчика
момента.
В соответствии с (1.2.3) для
установившегося положения гироузла, а так же  , где k3 - коэффициент усиления
УОС; UДУ - выходное напряжение датчика угла:
, где k3 - коэффициент усиления
УОС; UДУ - выходное напряжение датчика угла:
 (1.2.4)
(1.2.4)
где k2 - крутизна
характеристики ДУ;
Имеем:
 ;
;  ;
;
где k1k2k3 - жесткость
электропружины:
 (1.2.5)
(1.2.5)
 (1.2.6)
(1.2.6)
где  - крутизна выходной характеристики потоку;
- крутизна выходной характеристики потоку;
 - крутизна выходной характеристики по
углу.
- крутизна выходной характеристики по
углу.
2. Математическое
моделирование
2.1 Математическая
модель прибора ИУС-М. Вывод матрицы направляющих косинусов
Прибор ИУС-М представляет собой гексаду первичных измерителей, оси
чувствительности которых ориентированы по образующей конуса с углом
полураствора 54,7356° и
развернутых друг относительно друга на углы, кратные 60° [7]. Прибор состоит из 6
прецизионных поплавковых датчиков угловой скорости [10]. Расположение первичных
измерителей и ориентация их осей чувствительности показаны на рис.2.1.1.


Рис.2.1.1
Покажем вывод матрицы направляющих
косинусов прибора ИУС-М при помощи эйлеровых разворотов оси чувствительности
каждого ИК [8,9]. На рис.2.1.2 эти развороты осуществляются для оси
чувствительности измерительного канала №1.
Рис.2.1.2.
Здесь b’1=35°15’52” - угол, дополнительный к углу
полураствора конуса b=54,7356° .
Измерительный канал №1. Запишем матрицу перехода от системы координат
(СК) XYZ к  :
:
 (2.1.1)
(2.1.1)
Матрица перехода из СК  к
к  :
:
 (2.1.2)
(2.1.2)
Матрицу перехода из СК XYZ к получим из выражения:
 (2.1.3)
(2.1.3)
Таким образом, матрицу направляющих косинусов для оси чувствительности 1
измерительного канала, связывающую системы координат XYZ и X21Y21Z21, обозначим А1 и она имеет вид:
 (2.1.4)
(2.1.4)
На рис. 2.1.3 эйлеровы развороты осуществляются для оси чувствительности
измерительного канала №3.

Рис.2.1.3
Здесь угол b3’ тот же,
что и в предыдущих случаях, а угол a3 близок к 120°. Матрица перехода от системы координат XYZ к системе координат X13Y13Z13 имеет вид:
 (2.1.8)
(2.1.8)
Матрица перехода от системы координат X13Y13Z12
к системе координат X23Y23Z23 записывается следующим образом:
 (2.1.9)
(2.1.9)
Осуществляя операцию умножения матриц, аналогичную предыдущим, получим
матрицу направляющих косинусов для оси чувствительности ИК №3, связывающую
системы координат XYZ и X23Y23Z23:
 (2.1.10)
(2.1.10)

Рис.2.1.4
На рис.2.1.4 эйлеровы развороты осуществляются для оси чувствительности
измерительного канала №5. Здесь угол b5’ тот же, что и в предыдущих случаях, а угол a5 близок к 240°
Матрица перехода от системы координат XYZ к системе координат X15Y15Z15
имеет вид:
 (2.1.14)
(2.1.14)
Матрица перехода от системы координат X15Y15Z15
к системе координат X25Y25Z25 имеет вид:

Осуществляя операцию умножения матриц, аналогичную предыдущим, получим
матрицу направляющих косинусов для оси чувствительности ИК №5, связывающую
системы координат XYZ и X25Y25Z25:
 (2.1.16)
(2.1.16)

Рис.2.1.5
На рис.2.1.5 эйлеровы развороты осуществляются для оси чувствительности
измерительного канала №4. Здесь угол b4’ тот же, что и в предыдущих случаях, а угол a4 близок к 180°
Матрица перехода от системы координат XYZ к системе координат X14Y14Z14
имеет вид:
 (2.1.11)
(2.1.11)
Матрица перехода от системы координат X14Y14Z14
к системе координат X24Y24Z24 имеет вид:
 (2.1.12)
(2.1.12)
Осуществляя операцию умножения матриц, аналогичную предыдущим, получим
матрицу направляющих косинусов для оси чувствительности ИК №4, связывающую
системы координат XYZ и X24Y24Z24 :
 (2.1.13)
(2.1.13)
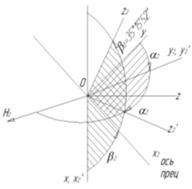
Рис.2.1.6
На рис.2.1.6 эйлеровы развороты осуществляются для оси чувствительности
измерительного канала №2. Здесь угол b2’ тот же, что и в случае измерительного канала №1, а
угол a2 близок к
60°.
Матрица перехода от системы координат XYZ к системе координат X12Y12Z12
имеет вид:
 (2.1.5)
(2.1.5)
Матрица перехода от системы координат X12Y12Z12
к системе координат X22Y22Z22 имеет вид:
 (2.1.6)
(2.1.6)
Осуществляя операцию умножения матриц, аналогичную (2.1.3), получим
матрицу направляющих косинусов для оси чувствительности ИК №2, связывающую
системы координат XYZ и X22Y22Z22:
 (2.1.7)
(2.1.7)
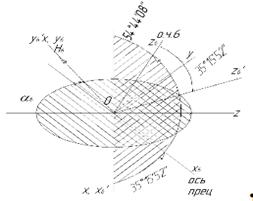
Рис.2.1.7
На рис.2.1.7 эйлеровы развороты осуществляются для оси чувствительности
измерительного канала №6. Здесь угол b6’ тот же, что и в предыдущих случаях, а угол a6 близок к 300°. Матрица перехода от системы координат XYZ к системе координат X16Y16Z16 имеет вид:
 (2.1.17)
(2.1.17)
Матрица перехода от системы координат X16Y16Z16
к системе координат X26Y26Z26 имеет вид:
 (2.1.18)
(2.1.18)
Осуществляя операцию умножения матриц, аналогичную предыдущим, получим
матрицу направляющих косинусов для оси чувствительности ИК №6, связывающую
системы координат XYZ и X26Y26Z26 :
 (2.1.19)
(2.1.19)
Прямая матрица направляющих косинусов для прибора БИЛУ имеет размерность
6´3 и составляется из третьих строк
матриц А1 - А6:
 (2.1.20)
(2.1.20)
В матрице А углы bi i=1 - 6 - углы, дополнительные к углу полураствора конуса,
т.е. bi=35°15’52”. В матрицу А вносят
фактические значения угла bi. Теоретические значения углов aI = 0°, a2 = 60°, a3
= 120°, a4=
180°, a5
= 240°, a6
= 300°. В матрицу А вносят фактические
значения ai,
при этом 


 учитывают с получающимся знаком, 10 знаков после запятой.
Идеальная прямая матрица А для осей чувствительности гексады имеет вид (при bi=35°15’52”, aI = 0°, a2 = 60°, a3 = 120°, a4= 180°, a5 = 240°, a6 = 300°):
учитывают с получающимся знаком, 10 знаков после запятой.
Идеальная прямая матрица А для осей чувствительности гексады имеет вид (при bi=35°15’52”, aI = 0°, a2 = 60°, a3 = 120°, a4= 180°, a5 = 240°, a6 = 300°):

Матрица А для осей чувствительности гексады при допустимой трубке  на взаимную ориентацию осей
чувствительности:
на взаимную ориентацию осей
чувствительности:
Обратная матрица находится из соотношения:
М=(АТА)-1АТ
2.2 Математическая модель ДУС -
чувствительного элемента
Параметры
гидроблока КХ79-060 сведены в таблицах 2.2.1 и 2.2.2.
Таблица 2.2.1
|
Параметр
|
Величина
|
Размерность
|
|
Н
|
65 + 3
|
гссмс
|
|
Jb
|
0,286 + 0,028
|
гссмс2
|
|
Кду
|
2,5 + 15% (8,6+15%)
|
мВ/дуг.мин
(В/рад)
|
|
Кдм
|
775 + 75
|
гссм/А
|
В табл. 1 введены обозначения:
Н, Jb - кинетический момент гироскопа и
момент инерции поплавковой гирокамеры (гироузла), соответственно;
Кду, Кдм - крутизна характеристик датчика угла (ДУ)
прецессии и датчика момента (ДМ), соответственно.
Величина коэффициента жидкостного демпфирования (nb) движений поплавковой гирокамеры, в
условиях меняющейся от -5°С
до +50°С температуры, приведена в табл. 2.2.2.
Таблица 2.2.2
|
Температура, град
|
0
|
+25
|
+40
|
|
nb, гссмс
|
£ 70
|
33,1±14,4
|
18,8±6,3
|
Диапазон входной угловой скорости wвх - ± 6 …°/с.
Блок-схема измерительного канала прибора КХ34-021 приведена на рис.2.2.1.

Рис.2.2.1. Блок-схема измерительного канала прибора КХ34-021
На Рис.2.2.2 приведена электрическая схема (упрощенная) усилителя
обратной связи УОС-096, содержащего полосовой усилитель ПУ с дифференциальным
выходом, выполненный на основе микросхемы АD822ARM,
фазочувствительный выпрямитель ФЧВ, выполненный по схеме двойного синхронного
детектирования на базе микросхемы АDG451BR, управляемой синхроимпульсами Сu1 и Сu2, пропорционально-интегральный корректирующий контур КК, выполненный
на основе микросхемы ОРА2177R,
суммирующий интегродифференцирующий усилитель мощности УМ, выполненный на
основе транзисторов 2Т664А9, 2Т665А9 и микросхемы АD822ARM,
активный фильтр 2-го порядка Ф (фильтр Баттерворта на основе микросхемы АD822ARM).
Генератор синусоидального напряжения питания ДУ) частотой fду выполнен по схеме полосового
усилителя на базе микросхемы АD820AR и транзисторов 2Т664А9, 2Т665А9.
Рис.2.2.2. Электрическая схема (упрощенная) усилителя УОС-96
На Рис.2.2.3 приведена схема включения обмотки обратной связи датчика
момента ДМ (резистор Rдм) с добавочным резистором Rдоб и термошунтом (резистор Rш) при компенсации температурного изменения крутизны
датчика момента Кдм, и, тем самым, стабилизации масштабного
коэффициента
 ,
,
где Кш - коэффициент передачи схемы для тока iдм.
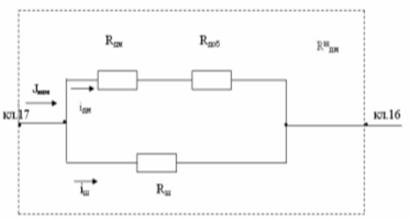
Рис. 2.2.3. Схема компенсации температурного изменения КДМ
На Рис. 2.2.1 ¸ 2.2.3 приняты следующие обозначения:
wвх - входная угловая скорость;
Мг , Мдм - гироскопический момент и
момент датчика момента ДМ,
действующие по оси прецессии гироузла (поплавковой
гирокамеры);
b, Uду - угол процессии гироузла и
напряжение с датчика угла ДУ;дм - суммарный ток через обмотку
обратной связи датчика момента и термошунт (при компенсации температурного
изменения масштабного коэффициента КДУС ,  ) ;ум, Uвых -
напряжение с измерительного резистора R33 и фильтра 2-го порядка Ф в
УОС-096 (соответственно, с выхода усилителя мощности УМ и с аналогового выхода
измерительного канала);
) ;ум, Uвых -
напряжение с измерительного резистора R33 и фильтра 2-го порядка Ф в
УОС-096 (соответственно, с выхода усилителя мощности УМ и с аналогового выхода
измерительного канала);
Uк1, Uк2 - напряжение на входах усилителя мощности УМ;
Uд+, Uд- - напряжение на выходе синхронных
детекторов;
Uпу+, Uпу- - напряжение на дифференциальных выходах предваритель-
ного усилителя ПУ.
Математическая модель датчика угловой скорости КХ79-060 - УОС-096 для расчета амплитудных и
фазочастотных характеристик (АФЧХ) формируется в виде передаточных функций [20]
в соответствии с дифференциальными уравнениями движения гироузла (обозначения
аналогичны принятым в таблице 2.2.1) :
Jb  + nb
+ nb  + Сос b = Н × wвх (2.2.1)
+ Сос b = Н × wвх (2.2.1)
где Сос - жесткость контура обратной связи, определяется
крутизной ДУ, ДМ, передаточными функциями функциональных узлов УОС-096 и
коэффициентом передачи схемы компенсации (Рис.2.2.3).
При введении символа дифференцирования  имеем
имеем
( Jb s2 + nb s + Сос) b = Н × wвх (2.2.2)
Следовательно, символическая форма (операторная форма при нулевых
начальных условиях, где s - символ преобразования Лапласа) уравнения движения
гироузла имеет вид:
 (2.2.3)
(2.2.3)
На Рис.2.2.4 в соответствии с операторной формой (2.2.3) и Рис. 2.2.1 ¸ 2.2.3, приведена структурная схема
математической модели
ДУС.
Рис. 2.2.4.
Структурная схема математической модели ДУС (для
расчета АФЧХ)
Согласно Рис. 2.2.4 жесткость (передаточная функция) контура обратной
связи имеет вид:
 , (2.2.4)
, (2.2.4)
где Kпу = ½ Wпу½ - коэффициент передачи предварительного усилителя ПУ ,
при этом передаточная функция предусилителя ПУ (Рис.2.2.2) имеет
вид:
- коэффициент передачи предварительного усилителя ПУ ,
при этом передаточная функция предусилителя ПУ (Рис.2.2.2) имеет
вид:
 (2.2.5)
(2.2.5)
при С2=С3, С5=С6, R6=R7
(Рис.2.2.2) имеем:
 ,
,  ,
, 

- передаточная функция ФЧВ имеет вид:
 (2.2.6)
(2.2.6)
при R10=R11, R16=R17, С15=С17,
С8=С9, fду> имеем
имеем
 ,
,
где tси - длительность синхроимпульсов Си1,
Си2.
- передаточная функция корректирующего контура КК имеет вид:
(с учетом Rш , Сш)
Wкк = Wкк1 + Wкк2(2.2.7)
где Wкк1 = , Wкк2 =
, Wкк2 = ,
,
передаточная функция усилителя мощности УМ для тока Jдм имеет
вид (при R24 = R25, С21 = С22):
WJум  (2.2.8)
(2.2.8)
- передаточная функция усилителя мощности УМ для тока Jдм
по напряжению Uу c выхода транзисторной схемы УМ имеет вид:
W ум
ум  (2.2.8а)
(2.2.8а)
 (2.2.8б)
(2.2.8б)
- полное сопротивление эталонного резистора (нагрузки усилителя
мощности УМ, без учета фильтра Ф):
Zум =  (2.2.9)
(2.2.9)
- передаточная функция фильтра Ф имеет вид:
 (2.2.10)
(2.2.10)
- коэффициент передачи для тока iдм по току Jдм,
в схеме компенсации
температурного изменения крутизны Кдм имеет вид:
Кш =  (2.2.11)
(2.2.11)
при этом температурная зависимость  имеет вид:
имеет вид:
 (2.2.12)
(2.2.12)


где  - сопротивление обмотки обратной связи датчика момента ДМ,
добавочного и шунтирующего резисторов при 0° С;
- сопротивление обмотки обратной связи датчика момента ДМ,
добавочного и шунтирующего резисторов при 0° С;
 - температурные коэффициенты сопротивлений .
- температурные коэффициенты сопротивлений .
Температурная зависимость крутизны датчика момента ДМ имеет вид:
 (2.2.13)
(2.2.13)
где 
 - крутизна при 0°С и температурный коэффициент датчика момента ДМ.
- крутизна при 0°С и температурный коэффициент датчика момента ДМ.
Компенсация температурного изменения крутизны Кдм и, тем
самым, стабилизация заданного значения масштабного коэффициента  обеспечивается в рабочем диапазоне
температур, с учетом ограничения на паспортное значение крутизны
обеспечивается в рабочем диапазоне
температур, с учетом ограничения на паспортное значение крутизны  датчика момента ДМ:
датчика момента ДМ:
К0дм > , гссм/А(2.2.14)
, гссм/А(2.2.14)
при этом минимально возможную погрешность стабилизации предполагается обеспечить выбором  (при заданном
(при заданном  и
и  ).
).
Значение сопротивления  выбирается с учетом условия:
выбирается с учетом условия:
 (2.2.15)
(2.2.15)
Значение  определяется из выражения:
определяется из выражения:

 (2.2.16)
(2.2.16)
Значение масштабного коэффициента КДУС, в заданном диапазоне
температур, определяется из выражения:
 ,
,  (2.2.17)
(2.2.17)
Значения  , считаются оптимальными, если в заданном диапазоне температур
погрешность стабилизации масштабного коэффициента ДУС будет минимальной.
, считаются оптимальными, если в заданном диапазоне температур
погрешность стабилизации масштабного коэффициента ДУС будет минимальной.
Погрешность стабилизации определяется согласно соотношения:
 (2.2.18)
(2.2.18)
Расчет погрешности DКДУС
осуществляется
в следующей последовательности:
- определяются значения  ,
,


при этом,  - паспортные значения сопротивления обмотки обратной связи и
крутизны датчика момента при номинальной температуре
- паспортные значения сопротивления обмотки обратной связи и
крутизны датчика момента при номинальной температуре  С;
С;
- определяется по выражению (2.2.15) значение  (минимально допустимое значение
(минимально допустимое значение  ;
;
- задается максимальное значение  и шаг D
и шаг D ;
;
- определяются от нижнего до верхнего значения температуры (с шагом  ) значения
) значения  - по выражению (2.2.12), значение
- по выражению (2.2.12), значение  - по выражению (2.2.20), значение Кш
- по выражению (2.2.11), значение Кдм - по выражению
(2.2.13), значение Кдус - по выражению (2.2.17), значение DКДУС% по выражению (2.2.18).
- по выражению (2.2.20), значение Кш
- по выражению (2.2.11), значение Кдм - по выражению
(2.2.13), значение Кдус - по выражению (2.2.17), значение DКДУС% по выражению (2.2.18).
Расчетные значения Кш, Rш, Rдм, Rдоб, суммарного сопротивления Rшдм (Рис.2.2.3)
и Rогр (Рис.2.2.2), крутизны датчика момента (Кдм), а
также погрешность стабилизации DКдус, в условиях меняющейся температуры от -5°С до +50°С, приведены в таблице 2.2.3 ( при
шаге = 5°C, aдм = 4,35×10-3 1/град, aдоб = 0,3×10-4 1/град, aш = 5,01×10-3 1/град, aКдм =4,21×10-4 1/град, Н=65 гссмс, Кномдус
=2 , wmaxвх =±6 …°/с, U maxу
=12в).
Таблица 2.2.3
|
Температура, °С
|
0°С
|
+25°С
|
+50°С
|
|
Rш, Ом
|
351,57
|
395,61
|
439,64
|
|
Rдм, -//-
|
126,27
|
140,0
|
153,73
|
|
Rдоб,
-//-
|
7,616
|
7,622
|
7,628
|
|
Rшдм, , -//-
|
96,96
|
107,5
|
118,04
|
|
Кш,
|
0,7242
|
0,7282
|
0,7315
|
|
Rогр, ,
Ом
|
803,04
|
792,49
|
781,96
|
|
Кдм, гссм/А
|
783,24
|
775
|
766,76
|
|
DКдус,%
|
~0
|
0,503
|
1,13
|
Из анализа таблицы 2.2.3 следует, что погрешность стабилизации DКдус составляет (0 ¸ 1,13)%. Снижение погрешности
стабилизации наблюдается при увеличении R0ш;
снижение погрешности стабилизации при номинальной температуре обеспечивается
при значениях параметров, полученных при 0°С.
При этом, значение Rогр
определяется из
выражения:
 , Ом (2.2.19)
, Ом (2.2.19)
где  , Ом (2.2.20)
, Ом (2.2.20)
 , мА (2.2.21)
, мА (2.2.21)
Для расчета АФЧХ определяются, из структурной схемы математической модели
ДУС (Рис.2.2.4) с учетом (2.2.4), следующие передаточные функции:
- передаточная функция разомкнутой цепи:
Wр.с. =  (2.2.22)
(2.2.22)
- передаточная функция для тока Jдм по скорости wвх :
Ф =
=  ,
,  (2.2.23)
(2.2.23)
передаточная функция для напряжения Uвых
по скорости wвх :
Ф = 10 -3×Zум×Wф× Ф ,
= 10 -3×Zум×Wф× Ф ,  (2.2.24)
(2.2.24)
- передаточная функция для угла b по скорости wвх :
Ф =
=  ,
,  (2.2.25)
(2.2.25)
Передаточная функция генератора (полосового усилителя) напряжения питания
ДУ определяется в соответствии с (Рис.2.2.2) и имеет вид:
 (2.2.26)
(2.2.26)
где КГ = ,
,
 ,
,
 ,
,
3.
Расчетно-конструкторская часть
3.1
Расчет ДУ, ДМ (ДУМ-031)
3.1.1 Описание
конструкции и основные параметры ДУМ-031
Датчик ДУМ-031 выполняет функции датчика угла (ДУ) и датчика момента (ДМ)
и предназначен для эксплуатации в составе прибора КХ79-060 в качестве
преобразователя угла поворота чувствительного элемента в электрический сигнал,
амплитуда которого пропорциональна углу поворота чувствительного элемента, а
фаза определяется направлением поворота, и в качестве преобразователя
постоянного тока во вращающий момент, пропорциональный величине этого тока.
Основные геометрические размеры ДУМ приведены на рис.3.1.1, электрическая
схема на рис. 3.1.2. Геометрические размеры ДУМ определялись из условий
оптимального размещения его в малогабаритном датчике угловой скорости.
Конструктивно ДУМ-031 состоит из ротора (1), статора (2) и наружного
магнитопровода (3).
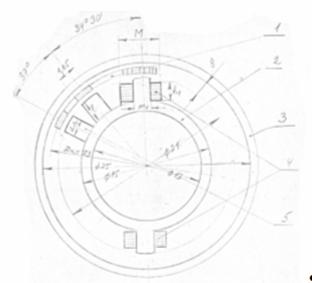
Рис.3.1.1
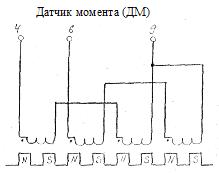
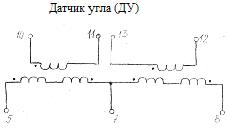
Рис.3.1.2.
Статор датчика представляет собой шихтованный магнитопровод, набранный из
листов трансформаторной стали, на котором размещены обмотки возбуждения (4) ДУ
и восемь магнитов (5) ДМ, выполненных из магнитотвердого высококоэрцитивного
сплава ЮНДКТ5БА.
Ротор (1) датчика представляет собой цилиндрический немагнитный каркас,
на котором размещены четыре катушки сигнальной обмотки ДУ и четыре катушки двух
обмоток ДМ.
Наружный магнитопровод (3) выполнен из магнитомягкого материала.
Статор датчика и наружный магнитопровод закреплены на неподвижной части
прибора, ротор - на подвижной части прибора.
По принципу действия трансформаторный ДУ представляет собой
трансформаторный датчик рамочного типа. При подключении обмотки возбуждения к
источнику переменного тока в магнитопроводе датчика и в воздушном зазоре
возникает переменное магнитное поле, которое пронизывает катушки сигнальной
обмотки, находящиеся в воздушном зазоре, и индуцирует в них ЭДС. Катушки
сигнальной обмотки включены последовательно встречно в каждой паре и
последовательно согласно между парами. В исходном (нулевом) положении датчика
катушки ротора располагаются симметрично относительно магнитопровода и величины
ЭДС, индуцируемые в них переменным магнитным потоком, будут одинаковыми и
выходные (вторичные) напряжения датчика благодаря встречному включению
сигнальных катушек в паре будут равны нулю. При повороте ротора в ту или другую
сторону от нулевого положения потокосцепление одной из сигнальных катушек в
каждой паре увеличивается (или уменьшается), а потокосцепление другой катушки в
каждой паре - уменьшается (или увеличивается).
Вследствие этого нарушается равенство индуцируемых в катушках ЭДС и на
выходе сигнальной обмотки появляется результирующая ЭДС, амплитуда и фаза
которой определяется величиной и направлением поворота ротора.
По принципу действия датчик момента относится к магнитоэлектрическим
датчикам момента постоянного тока. Вращающий момент в магнитоэлектрическом
датчике момента создается в результате взаимодействия магнитного поля
постоянного магнита и проводников с током, находящихся в этом поле. В датчике
момента магнитное поле создается 8 постоянныыми магнитами. В воздушном зазоре
между магнитом и наружным экраном в зоне действия постоянного магнитного поля расположены
катушки двух обмоток ДМ. При подаче на обмотки постоянного тока возникает
вращающий момент, напрвленгие которого зависит от полярности подаваемого тока.
Основные электрические параметры ДУМ-031 приведены в табл.3.1.1
Таблица 3.1.1
|
Наименование параметра
|
Значение параметра по ТУ
|
|
Сопротивление постоянному
току, Ом Датчик угла
|
|
|
А) обмотки возбуждения
10-11 Б) обмотки возбуждения 12-13 В) обмотки сигнальной 5-8
|
25,2 25,2 105,6
|
|
Датчик момента Г) обмотки
управления 4-9 Д) обмотки обратной связи 6-9
|
64 64
|
|
Ток возбуждения Мощность,
потребляемая ДУ (при U=10В, f=4096Гц), ВА Крутизна выходного напряжения ДУ,
мВ/дуг.мин Остаточное напряжение, мВ Крутизна датчика момента, гс см/А
|
0,65 0,22 1,18 1,0
|
|
При включении А) обмотки
управления 4-9 Б) обмотки обратной связи 6-9 Момент датчика в нулевом
положеннии
|
49 49
|
|
при токе J=0,050
A, гс см а) при включении обмотки 4-9 б) при
включении обмотки 6-9
|
2,47 2,47
|
3.1.2 Расчет датчика
угла
Данные для расчета:
m1 = 0,2см - ширина полюса
магнитопровода;
n1 = 0,35см - длина полюса
магнитопровода;
M =
0,500 см - внешний диаметр катушки;
d = 0,2 см - воздушный зазор;
h1 = 0,270 см - высота катушки;
h2 = 0,12 см - толщина сигнальной
обмотки;
h4 = 0,1 см - толщина стенки ярма;
m0 = 1,256 10-8
Гн/см - магнитная проницаемость воздуха.
Расчет магнитной проводимости воздушного зазора.
Для определения магнитной проводимости воздушного зазора применен
аналитический метод расчета магнитных проводимостей и метод разбивки поля на
простые фигуры.
Картина разбивки поля магнита на силовые трубки простой геометрической
формы приведена на рис.3.2.1.

Рис.3.1.3
Величины магнитных проводимостей этих областей определяются по формулам:




Поставив в формулы для расчета магнитных проводимостей числовые значения
входящих в них величин, получим:







Суммарная магнитная проводимость воздушного зазора:

Расчет обмотки возбуждения
Поперечное сечение стержня магнитопровода с катушкой возбуждения
изображено на рис.3.1.4.
Высота намотки выбрана равной 2,7 мм, толщина изоляции 0,1 мм, толщина
намотки 1,3 мм (без учета изоляции). Наружный слой изоляции на рис.3.1.4 не
показан.
Средний виток обмотки возбуждения изображен пунктирной линией.

Рис.3.1.4.
Площадь окна катушки возбуждения
s1 = 1,3 × 2,7 = 3,51 мм2
Диаметр провода обмотки возбуждения.
Выбираем провод ПЭТВ-2 Æ 0,071 мм (с изоляцией 0,094мм).
Число витков
обмотки возбуждения

где sOB - площадь сечения провода обмотки
возбуждения, мм2.
k’3 - коэффициент заполнения катушки.
Величина k’3 берется из специальных таблиц или определяется
экспериментально (k’3=0,41).
Из технологических соображений берем число витков обмотки возбуждения WOB=360витков.
Длина среднего витка катушки обмотки возбуждения (определяется из
рис.3.1.4)

Общая длина одной обмотки возбуждения

Сопротивление постоянному току одной обмотки возбуждения

где  - удельное сопротивление провода (для медного провода
- удельное сопротивление провода (для медного провода  )
)
Индуктивность одной обмотки возбуждения

Индуктивное сопротивление одной обмотки возбуждения

где f - частота напряжения возбуждения, Гц
Полное сопротивление одной обмотки возбуждения
Ток возбуждения


где  - напряжение возбуждения, В (одной обмотки возбуждения)
- напряжение возбуждения, В (одной обмотки возбуждения)
Плотность тока в обмотке возбуждения
Коэффициент мощности
Полная потребляемая мощность

где  - напряжение возбуждения (двух обмоток возбуждения)
- напряжение возбуждения (двух обмоток возбуждения)
Активная потребляемая мощность
 (3.1.1)
(3.1.1)
Расчет сигнальной обмотки. Основные геометрические размеры катушек
сигнальной обмотки, выбранные по конструктивно-технологическим соображениям,
приведены на рис.3.1.5. Средний виток катушки сигнальной обмотки изображен
пунктиром.
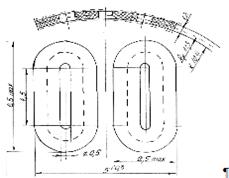
Рис.3.1.5.
Выбираем провод сигнальной обмотки ВЭБЖН Æ0,05 (Æ0,07 с изоляцией).
Площадь окна каждой катушки сигнальной обмотки
Число витков каждой катушки сигнальной обмотки

где  - коэффициент заполнения катушки сигнальной обмотки (
- коэффициент заполнения катушки сигнальной обмотки ( , определен экспериментально),
, определен экспериментально),
 - площадь сечения провода сигнальной обмотки, мм2
- площадь сечения провода сигнальной обмотки, мм2
Берем WOC = 240 витков.
Длина среднего витка катушки сигнальной обмотки

Общая длина обмотки одной сигнальной катушки

Сопротивление постоянному току сигнальной обмотки .(одной пары)

Крутизна холостого хода датчика угла

где  - крутизна холостого хода датчика с двумя парами сигнальных
катушек круглой формы, мВ/дуг.мин,
- крутизна холостого хода датчика с двумя парами сигнальных
катушек круглой формы, мВ/дуг.мин,
f -
частота напряжения возбуждения, Гц,
 - магнитная проницаемость воздуха, Гн/см,
- магнитная проницаемость воздуха, Гн/см,
 - ток возбуждения, мА,
- ток возбуждения, мА,
 - число витков обмотки возбуждения,
- число витков обмотки возбуждения,
 - воздушный зазор, см,
- воздушный зазор, см,
 - толщина сигнальной катушки, см,
- толщина сигнальной катушки, см,
- коэффициент заполнения катушки сигнальной обмотки,
 - диаметр провода сигнальной обмотки по меди, см,
- диаметр провода сигнальной обмотки по меди, см,
 - средний радиус поворота сигнальной обмотки, см,
- средний радиус поворота сигнальной обмотки, см,
R -
наружный радиус катушки сигнальной обмотки, см
r -
внутренний радиус катушки сигнальной обмотки, см.
 Учтем увеличение крутизны датчика за счет использования
сигнальных катушек овальной формы введением коэффициента К=1,7.
Учтем увеличение крутизны датчика за счет использования
сигнальных катушек овальной формы введением коэффициента К=1,7.

Крутизна датчика sН при нагрузке сигнальной обмотки
сопротивлением
RH = 10000 Ом
Крутизна датчика при нагрузке сигнальной обмотки определяется при помощи
схемы замещения сигнальной обмотки с учетом внутренних сопротивлений ROC, XLOC и сопротивления нагрузки RH, приведенной на рис.3.1.6.
Рис.3.1.6
где  - индуктивное сопротивление одной пары сигнальных катушек
- индуктивное сопротивление одной пары сигнальных катушек
Индуктивное сопротивление сигнальной обмотки (одной пары)

где  - коэффициент трансформации датчика;
- коэффициент трансформации датчика;
- индуктивное сопротивление одной пары сигнальных катушек
При угле поворота ротора 1 дуг.мин от нулевого положения коэффициент
трансформации определяется как отношение крутизны холостого хода датчика в
вольтах к величине напряжения питания датчика:

Крутизна датчика при нагрузке в цепи сигнальной обмотки

3.1.3 Расчет датчика момента
Момент, развиваемый датчиком, определяется силой, возникающей при взаимодействии
тока в активных частях обмотки ротора с полем, создаваемым магнитом в воздушном
зазоре.
Расчетной формулой, определяющей момент этого взаимодействия, будет

где  - крутизна холостого хода датчика с двумя парами сигнальных
катушек круглой формы, мВ/дуг. мин,
- крутизна холостого хода датчика с двумя парами сигнальных
катушек круглой формы, мВ/дуг. мин,
 - ток в обмотке ротора, А;
- ток в обмотке ротора, А;
 - число катушек обмотки ротора;
- число катушек обмотки ротора;
 - число витков одной катушки;
- число витков одной катушки;
 - диаметр ротора по катушкам, см;
- диаметр ротора по катушкам, см;
 - расчетная длина активных сторон катушек ротора, см (равная
ширине магнита).
- расчетная длина активных сторон катушек ротора, см (равная
ширине магнита).
Расчет момента, создаваемого датчиком, состоит из определения оптимальных
конструктивных параметров обмоток ротора и определения индукции в воздушном
зазоре в выбранной магнитной системе с целью получения максимально возможного
значения выходного момента.
Данные для расчета
Основные геометрические размеры приведены на рис.3.1.1.
 - число полюсов датчика момента
- число полюсов датчика момента
 - высота магнита
- высота магнита
 - ширина магнита
- ширина магнита
 - радиус ротора по магнитам
- радиус ротора по магнитам
- воздушный зазор
 - угол между магнитами.
- угол между магнитами.
Определение суммарной геометрической проводимости элементарного магнита
Проводимость рабочей зоны воздушного зазора

Проводимость рассеяния



(Величины R’ и r’ определены по рис.3.1.7 )


где 
Рис.3.1.7

Рис.3.1.8

Суммарная проводимость элементарной магнитной системы вычисляется в
соответствии с эквивалентной схемой магнитной системы, представленной на
рис.3.1.8.

Учитывая, что в формулах для расчета проводимостей отражены основные
области магнитного поля, учтем оставшиеся области введением экспериментального
коэффициента 1,2.

Сечение полюса элементарного магнита

Длина средней линии элементарного магнита (из рис.3.1.1)

Коэффициент приведения проводимости
Приведенная суммарная проводимость

Угол наклона прямой, характеризующий размагничивающий фактор

По кривой размагничивания сплава ЮНДКТ5БА и прямой, проведенной под углом
 к оси абсцисс (рис.3.1.9)
определяется значение индукции
к оси абсцисс (рис.3.1.9)
определяется значение индукции  в нейтральной зоне магнита.
в нейтральной зоне магнита.

Рис.3.1.9
С целью стабилизации магнитов они должны быть подвергнуты частичному
размагничиванию воздействием переменного магнитного поля с убывающей до нуля
амплитудой и термообработке, состоящей из серии термоударов, с температурами
несколько выше и несколько ниже эксплуатационных. После этих воздействий
величина индукции в материале магнитов упадет, (примерно на 15%), так как угол
подъема индукции по коэффициенту возврата ниже подъема по кривой
размагничивания.
Магнитная система в датчике разомкнута и это приводит к снижению индукции
в магните после намагничивания примерно на 30%.
Учитывая вышеуказанные факторы, ожидаемое значение индукции в нейтрали
магнита составит

Коэффициент рассеяния магнитной системы

Величина магнитного потока в нейтральной зоне магнита

Величина магнитного потока в воздушном зазоре

Величина индукции в рабочем зазоре

Момент развиваемый датчиком

Расчет обмоток
Принципиальная электрическая схема обмоток приведена на рис.3.1.2.
Каждая из обмоток управления и обратной связи состоит из двух катушек,
расположенных диаметрально противоположно. Все катушки идентичны и расположены
под полюсами магнитов.
Основные геометрические размеры катушки приведены на рис.3.1.10.
Средний виток изображен пунктирной линией.

Рис.3.1.10.
Выбираем провод ВЭБЖН 0,063 мм (с изоляцией 0,085мм)
Окно, занимаемое катушкой
