|
№ п/п
|
Параметри
|
Канали внесення регулюючих дій
|
|
1
|
2
|
3
|
|
1
|
Рівень в першій ємності стічних вод
|
Трубопровід подачі стічних вод
|
|
2
|
Кислотність в першій ємності стічних вод
|
Трубопровід подачі сірчаної кислоти
|
|
3
|
Концентрація нікелю в другій ємності стічних вод
|
Трубопровід видачі стоку із ємності для подачі на
гальванокоагулятор
|
|
4
|
Кислотність стоків в другій ємності
|
Трубопровід подачі вапняного молока в ємність
|
|
5
|
Концентрація заліза в другій ємності стічних вод
|
Трубопровід подачі хлорної вапно в ємність
|
|
6
|
Рівень мула в першому відстійнику
|
Трубопровід видачі мула з першого відстійника
|
|
7
|
Рівень мула в другому відстійнику
|
Трубопровід видачі мула з другого відстійника
|
|
8
|
Рівень освітленої води в 1-ій буферній місткості
|
Трубопровід видачі освітленої води з 1-ої буферної
місткості
|
|
9
|
Рівень освітленої води в 2-ій буферній місткості
|
Трубопровід видачі освітленої води з 2-ої буферної
місткості
|
Як було вказано
вище, для підвищення ступеня очищення стічних вод від міді методом
гальванокоагуляції необхідно підтримувати рН= 4.5-5.5, а для максимального
виділення металів з води і подальшому скиданню стічних вод необхідно підтримувати
рН, рівної від 7 до 8. При підвищенні рівня стоків вище певних меж вони можуть
перелитися через край, а у разі різкого пониження рівня виникнуть перебої в
роботі насоса. Для нейтралізації стоків необхідно також контролювати
концентрацію нікелю і заліза для повного очищення стоків.
Таким чином,
вибрані контури контролю і регулювання дозволяють вести процес очищення в
оптимальному режимі.
У даній роботі
автоматизація виконана на базі мікропроцесорної техніки із застосуванням
мікроконтролера Р-130М.
Малоканальний
мікропроцесорний контролер Р-130 - довгожитель на ринку засобів автоматизації
управління технологічними процесами. За десять років Чебоксарським "Заводом
Електроніки і Механіки" випущено близько 20 тисяч приладів, що складає
близько 60 відсотків цієї продукції, проведеної на вітчизняному ринку.
Контролери Р-130
виробництва ВАТ "ЗЭиМ" використовують багато підприємств країни. Накопичений
багатий досвід їх застосування в різних галузях: енергетиці, хімії, нафтохімії,
машинобудуванні, будівельній індустрії, целюлозно-паперовій промисловості. Контролери
призначені для побудови АСУ ТП і виконують функції управління і регулювання
технологічними процесами. Причина їх високої популярності в тому, що контролери
Р-130 прості в експлуатації. Технологічне програмування контролера не вимагає
знання спеціальних мов і участі висококваліфікованих програмістів. Його зможе
здійснити технолог, оператор знайомий з традиційними засобами контролю і
управління в АСУ ТП.
За час
експлуатації контролера Р-130 зібрано безліч зауважень і пропозицій від
споживачів, які лягли в основу його модернізації. У новій версії контролера
Р-130М збережена самодостатність, властива всім контролерам Р-130. При його програмуванні
і експлуатації на об'єкті не вимагається додаткових засобів (комп'ютера, окремо
набуваючого програмного забезпечення). В даний час в експлуатації знаходяться
тисячі контролерів Р-130, для них створена значна база програмних напрацювань. Модернізований
варіант контролера не зажадає нових програм, він адаптований до тих, що вже
існують. Для клієнтів-підприємств, що вже працюють з контролерами Р-130,
збережені колишні схеми їх підключення. У модернізованому варіанті приладу
залишилися тими ж габаритно-приєднувальні розміри. Все це u1079 значно спрощує
освоєння у виробництві нової моделі.
Разом з
достоїнствами попередніх модифікацій модернізований контролер Р-130М придбав
ряд властивостей, які істотно підвищують його конкурентоспроможність на сучасному
ринку автоматизації.
Проведена
комплексна модернізація апаратного забезпечення контролера. В першу чергу
модернізації піддався процесорний модуль. У контролері Р-130М використовується
IBM-сумісний процесор.
Для зв'язку
контролерів Р-130 із засобами верхнього рівня використовується блок шлюзу. У
моделі Р-130М необхідності в цьому пристрої немає, оскільки функціональні
можливості шлюзу закладені в модернізованому варіанті контролера. Крім того, є
Підтримка протоколів Modbus і Ethernet TCP/IP, яка використовується для
об'єднання контролерів в мережі різного рівня.
Сьогодні в
контролерах Р-130 діє мережа "Транзит", розроблена більше десяти
років тому, яка тепер не влаштовує споживача як дуже повільна і така, що має
кільцеву конфігурацію, зі всіма властивими кільцю недоліками. Проте підтримка
цієї мережі зберігається для взаємодії між контролерами Р-130 і Р-130М. За
рахунок використання нових протоколів модернізована модель контролера Р-130
дозволить налагодити швидкісний обмін інформацією про поточний технологічний
процес.
Для
модернізованого контролера розробляється OPC сервер, який виконує функцію
взаємодії з SCADA-системами.
У контролері
Р-130М передбачені програмування і завантаження призначених для користувача
програм, а також нових версій програмного забезпечення з верхнього рівня через
наявні інтерфейсні канали. Можливість програмування контролера уручну
зберігається, проте з'являється нова можливість програмування з комп'ютера. На
відміну від Р-130, в якому оновлення версій програмного забезпечення здійснюється
лише шляхом перепрограмування або заміни мікросхем, що містять системну
програму, в оновленому контролері можна змінювати програму шляхом завантаження
нової версії через наявні комунікаційні канали з комп'ютера.
В даний час
продовжуються роботи по подальшій модернізації контролера. В найближчому
майбутньому планується здійснити декілька проектів.
1. Сьогодні на ВАТ
"ЗЭиМ" випускаються контролери двох модифікацій, розраховані на
безперервні і дискретні процеси (аналогова і безперервно-дискретна моделі). У
перспективі можливо об'єднати ці функції в одному контролері, який зможе
одночасно працювати в режимах логічної, аналогової і безперервно-дискретної
моделей контролера Р-130.
2. Видалена
діагностика через Internet - це можливість діалогу контролера через Інтернет з
сервісною службою розробника/виробника. Така функція дозволить у разі неполадки
звернутися безпосередньо до розробників, щоб оперативно одержати інформацію про
усунення проблеми.
3. Сьогодні
технологічне програмування контролера Р-130 здійснюється перекладом його в
режим програмування, під час якого контролер не виконує своїх функцій, що
управляють.
Але далеко не всі
виробничі процеси можна переривати. Тому надалі заплановано ввести можливість
програмування контролера під час роботи на об'єкті, без переривання процесу
управління.
4. Перспективною
можливістю є і виконуюча система мови FBD стандарту IEC
61131-3. Міжнародні
стандарти містять п'ять мов технологічного програмування. Проте контролер Р-130
має мову програмування, не відповідну цим стандартам. У перспективі планується
адаптувати контролер до однієї із стандартних мов технологічного програмування.
Слід зазначити, що
нова технологічна мова вводиться в модернізований варіант контролера шляхом
підключення нової бібліотеки, що динамічно підключається, що дозволяє без
істотних проблем виконувати на одному контролері завдання, що використовують
різні бібліотеки. Однією з бібліотек, що підключаються, стане бібліотека
нечіткої логіки, яка все ширше використовується в завданнях управління технологічними
процесами.
Передбачається
можливість створення бібліотек власних алгоритмів з програмуванням на мові
С/С++.
Робота над
розширенням можливостей контролера проводитиметься послідовно і упроваджуватися
після ретельного тестування. Оновлення програмного забезпечення стане
здійснюватися шляхом завантаження на твердотільний диск процесора контролера
нових версій програм і бібліотек.
Архітектура
Р-130М. Зміни в архітектурі контролера зв'язані із застосуванням недорогого
IBM-PC-сумісного процесорного модуля в стандарті РС/104.
Спрощена
архітектура контролерів Р-130 і Р-130М показана на мал.3.4
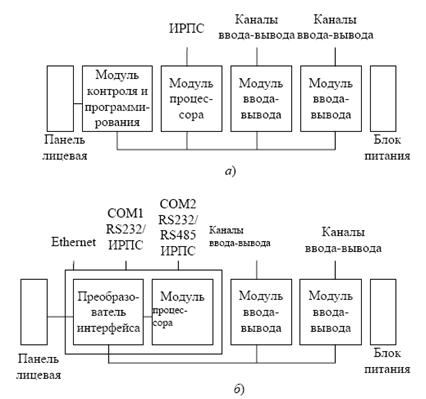
Рисунок 2.1 - Спрощена
архітектура контролерів Р-130 (а) і Р-130М (б)
Як видно з
малюнка, основні зміни пов'язані з підключенням процесора. Перетворювач
інтерфейсу здійснює формування сигналів внутрішньої магістралі контролера, що
управляють, а також перетворення сигналів комунікаційних портів контролера в
гальванічно розв'язані сигнали інтерфейсів RS232, RS485 або ИРПС. Пропонований
підхід дозволяє реалізувати наступну мережеву архітектуру.
Контролери Р-130
можуть бути підключені до контролера Р-130М за допомогою інтерфейсу ИРПС. При цьому Р-130М працюватиме не тільки як
контролер, але і як шлюз мережі "Транзит". Тим самим здійснюється
можливість інтеграції існуючого парку контролерів Р-130 в сучасні системи
управління технологічними процесами.
Функціональні
можливості шлюзу Р-130М нарощуватимуться, зокрема, будуть додані функції
ведення архівів даних для контролерів Р-130.
Для зв'язку
контролерів Р-130М можуть бути використані інтерфейси RS485 Modbus і Ethernet (мал.3.6).
У багатьох випадках, наприклад при поганій передбаченості доступу до Ethernet,
доцільно використовувати для зв'язку між контролерами інтерфейс Modbus, а
Ethernet використовувати для зв'язку з верхнім рівнем системи управління.
Програмне
забезпечення розроблене на мові С++.
Конфігурація
контролера встановлюється відповідно до інформації, що міститься у файлі
конфігурації контролера.
Всі завдання
зберігаються в окремих файлах, які містять інформацію про конфігурацію завдання
і програму, що інтерпретується. Кожне завдання може мати декілька файлів
настройок (наприклад, в них можуть бути відбиті особливості, рецепти
технологічного процесу, що використовує одне і те ж завдання).
Кожне завдання
виконується під управлінням інтерпретатора мови функціональних блоків в
окремому потоці.
Алгоритми
реалізовані у вигляді динамічно компонованих бібліотек (аналогічно бібліотекам
Windows. DLL) і підключаються залежно від вимог, що пред'являються завданнями.
Склад програмного
забезпечення контролера:
RTOS-32.
Об'єктно-орієнтований
інтерфейс.
Підсистема
введення/висновку.
Інтерпретатор мови
функціональних блоків.
Редактор мови
функціональних блоків.
Підсистема
оперативного управління і настройки.
Комунікаційна
підсистема.
Бібліотеки
інтерпретатора.
Бібліотеки
підтримки.
Підсистема
діагностики.
Переваги нового
контролера Р-130М:
Збережені всі
функціональні можливості контролера
Р-130 (включаючи
підтримку бібліотеки алгоритмів) і габарити - приєднувальні розміри.
Виключені всі
помилки програмного забезпечення контролера Р-130.
Проведена
комплексна модернізація апаратного забезпечення.
Застосована
вбудована операційна система реального часу RTОS-32.
Є фізичні
інтерфейси - ИРПС RS232, RS 485.
Здійснюється
підтримка протоколів "Транзит", Modbus і Ethernet TCP/IP.
Програмування і
завантаження призначених для користувача програм, нових версій програмного
забезпечення з верхнього рівня через ті, що є u1080 інтерфейсні канали.
Використовується
вища точність математичної обробки сигналів.
Є можливість
створення бібліотек власних алгоритмів з програмуванням на мові С/С++.
Тепер необхідно
підібрати засоби автоматизації, які працюватимуть в комплекті з Р- 130М. При їх
виборі повинні враховуватися наступні чинники:
вид, величина і
межі вимірювання контрольованого параметра;
необхідна точність
вимірювань;
необхідна
швидкодія;
конструкція
апаратів і режими їх роботи;
умови монтажу,
обслуговування і ремонту;
економічні показники.
Для вимірювання
кислотності стоків вибраний рН-метр, що складається з чутливого елементу ДПг-4М
(погружного) і перетворювача П-201.
Для вимірювання
концентрації вибраний аналізатор змісту металів в розчинах "Спектр-4А";
він дозволяє здійснювати вимірювання концентрації нікелю і заліза з високою
точністю. Датчиком рівня в збірці стоків є акустичний рівнемір ЭХО-3, що
складається з акустичного перетворювача АП і перетворювача передавального
вимірювального ППИ-3. Для вимірювання тиску в магістралі вибраний "Сапфір
22ДИ". Як вторинні прилади використовується трьохканальний самописний
прилад А-543. Пускач ПМЕ-111 забезпечує роботу електродвигуна. Як регулюючий
орган вибраний замочно-регулюючий клапан 15с920нж. А також вибраний замочний
клапан 15нж940п, який встановлений для дистанційного керування.
Функціональна
схема автоматизації є основним технічним документом, на підставі якого
розробляється вся решта схем по автоматизації і складається специфікація на
замовлення приладів та засобів автоматизації.
На схемі
представлено основне і допоміжне устаткування, а також всі засоби автоматизації.
Розглянемо найважливіші контури контролю, регулювання і сигналізації.
2.3.1 Регулювання
рівня стоків в збірнику
Контроль рівня в
збірці стоків здійснюється на акустичному рівнемірі ЭХО-3 (поз.1-1, 1-2), що
складається з акустичного перетворювача (АП) і перетворювача передавального
вимірювального (ППИ-3). АП перетворює електричний імпульс, що підводиться до
нього, в акустичний і перетворить відбитий імпульс від поверхні контрольованого
середовища назад в електричний. ППИ-3 вимірює перетворення часу запізнювання
відбитого імпульсу щодо посланого зондуючого у вихідний уніфікований сигнал
постійного струму 0-5 мА. Вихідний сигнал обробляється контролером Р-130М (поз.1-4).
Він контролює величину рівня і при його відхиленні відпрацьовує регулюючу дію. Вихідний
сигнал посилюється блоком посилення потужності БУМ-10, що входить до складу Р-130М
(поз.1-5). Далі сигнал йде на електропривод (поз.1-6), який переміщенням штока клапана змінює кількість нікельмістких
стічних вод, що поступають в збірку. Крім того, за допомогою трьохканального
вторинного самописного приладу А-543-262 здійснюється реєстрація кількості
стоків. У разі критичного рівня спрацьовує схема сигналізації, про що свідчать
сигнальні табло.
2.3.2 Регулювання
рН стоків
Кислотність стоків
в збірці вимірюється потенціометричним методом. Датчиком є чутливий елемент
типу ДПг-4М (погружний) (поз.2-1). Для перетворення ЕДС чутливого елементу в
уніфікований сигнал постійного струму застосований перетворювач П-201 (поз.2-2).
Далі сигнал обробляється контролером Р-130М (поз 1-4), який контролює величину
і при розузгодженні видає регулюючу дію. Цей сигнал посилюється блоком
посилення потужності БУМ (поз.2-3). Він управляє виконавчим механізмом МЕП-2500
(поз.2-5), який переміщенням штока клапана змінює витрату сірчаної кислоти в
збірку стоків, тим самим змінюючи рН стоків. За допомогою трьохканального
самописного приладу А-543 проводиться реєстрація кількості сірчаної кислоти.
Функціональна дія
контуру регулювання рН в другій збірці шляхом подачі вапняного молока (поз.5-1¸5-4) проводиться
аналогічним чином.
Контроль рівня
стоків в збірці здійснюється акустичним рівнеміром ЭХО-3 (поз.3-1, 3-2), що складається з акустичного перетворювача (АП) і
перетворювача передавального вимірювального (ППИ-3). АП перетворить електричний
імпульс, що підводиться до нього, в акустичний і перетворить відбитий імпульс
від поверхні контрольованого середовища назад в електричний. ППИ-3 вимірює
перетворення часу запізнювання відбитого імпульсу щодо посланого зондуючого у
вихідний уніфікований сигнал постійного струму 0-5 мА. Вихідний сигнал поступає
на контролер Р-130М (поз.1-4), який контролюється ним і у разі критичного рівня
спрацьовує сигналізація, про що свідчить сигнальне табло.
Для вимірювання
концентрації міді вибраний аналізатор вмісту металів в розчинах типу "Спектр-4А"
(поз.4-1, 4-2, 4-3), в комплект якого входять спектрометричний пристрій,
пристрої аналогової реєстрації і цифрової обробки інформації. Дія аналізатора
заснована на методі спектрометрії, атомної абсорбції полум'я. Сигнал з
аналізатора поступає на контролер Р-130М (поз.1-4), який контролює величину
концентрації і при її розузгодженні виробляє дію, що управляє. Цей сигнал
блоком посилення потужності БУМ (поз.4-4). Далі сигнал поступає на
електропривод (поз.4-5), який переміщенням штока клапана спускає стічні води із
збірки на очищення в гальванокоагулятор.
Для вимірювання
концентрації вибраний аналізатор змісту металів в розчинах типу "Спектр-4А"
(поз.6-1, 6-2, 6-3), в комплект якого входять спектрометричний пристрій,
пристрої аналогової реєстрації і цифрової обробки інформації. Дія аналізатора
заснована на методі спектрометрії, атомної абсорбції полум'я. Сигнал з
аналізатора поступає на контролер Р-130М (поз.6-4), який контролює величину
концентрації і при її розузгодженні виробляє дію, що управляє. Цей сигнал
посилюється блоком посилення потужності БУМ (поз.6-5). Далі сигнал поступає на
виконавчий механізм МЭП-2500 (поз.6-6), який переміщенням штока клапана змінює
витрату хлорного вапна.
Регулювання рівня
мула у відстійнику здійснюється за допомогою акустичного рівнеміра ЭХО-3 (поз.7-1, 7-2), що складається з
акустичного перетворювача (АП) і перетворювача передавального вимірювального (ППИ-3).
АП перетворить електричний імпульс, що підводиться до нього, в акустичний і
перетворить відбитий імпульс від поверхні від поверхні контрольованого
середовища назад в електричний. ППИ-3 вимірює перетворення часу запізнювання
відбитого імпульсу щодо посланого зондуючого у вихідний уніфікований сигнал
постійного струму 0-5 мА. Вихідний сигнал обробляється контролером Р-130М (поз.6-4).
Він контролює величину рівня і при його відхиленні відпрацьовує регулюючу дію. Вихідний
сигнал посилюється блоком посилення потужності БУМ, що входить до складу Р-130М
(поз.7-3). Він управляє електроприводом (поз.7-4), який переміщенням пережимних
траверс затвора, що змінює кількість мула, що виходить з відстійника.
Функціональна дія
контуру регулювання мула в другому відстійнику (поз.8-1¸8-4) проводиться
аналогічним чином.
Контроль рівня
освітленої води в першому баку здійснюється на акустичному рівнемірі ЭХО-3 (поз.9-1,
9-2), що складається з акустичного перетворювача (АП) і перетворювача
передавального вимірювального (ППИ-3). АП перетворить електричний імпульс, що
підводиться до нього, в акустичний і перетворить відбитий імпульс від поверхні
від поверхні контрольованого середовища назад в електричний. ППИ-3 вимірює
перетворення часу запізнювання відбитого імпульсу щодо посланого зондуючого у
вихідний уніфікований сигнал постійного струму 0-5 мА. Вихідний сигнал
обробляється контролером Р-130М (поз.6-4). Він контролює величину рівня і при
його відхиленні відпрацьовує регулюючу дію. Вихідний сигнал посилюється блоком
посилення потужності БУМ, який входить до складу Р-130М (поз.9-3). Далі сигнал
поступає на електропривід (поз.9-4), який переміщенням штока клапана змінює
кількість освітленої води, що виходить з першої буферної місткості.
Функціональна дія
контуру регулювання рівня освітленої води в другій буферній місткості (поз.10-1¸10-5) проводиться
аналогічним чином.
Контур контролю і
сигналізації тиску стислого повітря працює таким чином. Датчиком є
вимірювальний перетворювач тиску САПФІР - 22ДИ (поз.11-1). Він виробляє
уніфікований струмовий сигнал 0-5 мА, що поступає на блок контролера Р-130М (поз.10-3).
Сигнал, що поступив на контролер, контролюється і у разі досягнення ним
аварійних значень спрацьовує схема блокування, на пульті запалюється світове
табло HL5.
Функціональна дія
контурів контролю тиску в гальванокоагулятор (поз.12-1), на фільтр-прес (поз.13-1)
проводиться аналогічним чином.
Запуск електродвигуна насоса здійснюється пускачем магнітоелектричним
ПМЕ-11 (поз.14-1). Напруга на пускач подається за допомогою кнопки КУ-123-12 (поз.14-2),
що знаходиться на пульті управління.
Про включення
електродвигуна свідчить світлове табло.
2.4 Опис
пульта управління
Пульти і щити
призначені для розміщення на них засобів контролю і управління технологічним
процесом. Пульти і щити встановлюються в спеціальних щитових або виробничих приміщеннях.
Вони повинні відповідати ОСТ 36.13-90.
У даній роботі
розроблений пульт управління. Пульт - це корпус пульта зі встановленою
арматурою, апаратурою, електричними і трубними проводками, підготовленими до
підключення зовнішніх ланцюгів.
Вибраний пульт з
приладовою приставкою, похилої ПНП-2-1- (800*600) - УХЛ1-1Р30. На пульті
розміщені засоби контролю і регулювання безпосередньо процесом
гальванокоагуляции, а саме: мікропроцесорний контроллер Р-130М і аналоговий
багатоканальний прилад А543-262 на приладовій приставці, похилої, а також одне
табло з чотирьох сигнальних ламп, дві кнопки управління для технологічної сигналізації, дві кнопки управління
для повітрянагнітача на стільниці.
На кресленні
показаний пульт вигляд збоку, вигляд спереду і вигляд на внутрішні площини. На
кресленні вигляду на внутрішні площини показані прилади, апаратура, блоки
затисків рейки для установки апаратури, потоки електричних і трубних проводок. Приведені
в додатку "Перелік складових частин одиничного пульта" і "Написи
на табло і в рамках".
2.5 Опис
схеми зовнішніх електричних і трубних проводок
Схеми зовнішніх
електричних і трубних проводок підрозділяються на схеми з’єднання і схеми
підключення зовнішніх проводок. Схеми з’єднань зовнішніх проводок - це
комбіновані схеми, на яких показані електричні і трубні зв'язки між приладами і
засобами автоматизації, встановленими на технологічному устаткуванні поза
щитами і на щитах, а також підключення проводок до приладів і щитів. Схема
з’єднання виконана на підставі функціональної схеми автоматизації процесу
очищення. Розглянемо схему зовнішніх проводок технологічного процесу очищення
стоків.
У прямокутнику
пульта показують блоки затисків, з’єднувачів, а також підключення до ним труб,
жив кабелів і дротів з відповідним маркуванням.
По параметру
рівень. Місце відбору проб: збірки, відстійники,
буферні місткості. Датчик в комплекті з перетворювачем з'єднується з клемами
пульта управління кабелем марки КВВГ 3´1. Дріт живлення марки ПВ 1´2.5
По параметрам: рН,
концентрація і тиск. Місце відбору проб: збірники. Датчик
в комплекті з перетворювачем з'єднується з клемами пульта управління кабелем
марки КВВГ 3´1. Дріт живлення марки ПВ 1´2.5
Пускач з'єднується
з клемами пульта управління кабелем марки КВВГ 3´1. Дріт живлення марки
ПВ 1´2.5
У даному розділі
розроблена функціональна схема автоматизації процесу очищення нікельмістких
стічних вод на станції нейтралізації ДНВП "Комунар". Рішення, прийняті в даному розділі, є базовими, оскільки без використання системи автоматизації неможлива
підтримка регламентованого режиму проведення процесу. Для зменшення
загромадження пульта управління застосовуються багатоканальні прилади типу А543
(3 канали).
Питання
ресурсозберігання і збереження екологічної рівноваги між виробничою діяльністю
людини і навколишнім середовищем стоять на одному з перших місць по гостроті
проблеми. У зв'язку з цим проблема очищення стічних вод придбала особливо
важливе значення.
В ході виконання
проекту була розроблена система автоматизації процесу очищення нікельмістких
стічних вод.
Впровадження
автоматизованої системи управління привело до підвищення ступеня очищення
стічних вод. Була розроблена функціональна схема автоматизації, вибрані контури
контролю і регулювання дозволили вести процес в оптимальному режимі. Функціональна
схема автоматизації виконана на базі мікропроцесорного контроллера Р-130М.
1.
Касаткин А.Г. Основные процессы и аппараты
химической технологии. - М.: Химия, 2001, 784 с.
2.
Технические средства автоматизации. Часть вторая. Микропроцессорные
регулирующие и исполнительные механизмы: Учебное пособие / Тошинский В.И., Бабиченко
А.К., Молчанов В.И. и др.; Под ред. Бабиченко А.К. - К.: ИСДО, 2007, - 200 с.
3.
Промышленные приборы и средства автоматизации,
справ. / под ред. Черенкова В.В. - Л.; Машиностроение. 1997 - 847 с.
4.
Ефимов В.Т., Молчанов В.И., Ефимов А.В. Методы
расчетов в автоматизации химико-технологических и теплоэнергетических процессов.
Харьков. 1998 г.
5.
Смирнов Д.Н., Генкин В.Е. Очистка сточных вод в
процессах обработки металлов - М., Металлургия. 1999-224 с.
7.
Костюк А.М., Карнаух С.П. Очистка сточных вод
машиностроительных предприятий. - М., Металлургия, 1995. - 198 с.
8.
Запольский А.К., Образцов В.В. Комплексная
переработка сточных вод гальванического производства. - Л., Химия, 1993. - 187
с.
9.
Смирнов Д.Н. Автоматическое регулирование процессов
очистки природных и сточных вод. - 2-е изд. - М.: Стройиздат, 1985. - 310с.
10.
Волоцков Ф.П. Очистка и использование сточных вод
гальванических производств. - М.: Стройиздат, 1983. - 104с.
11.
Бучило Эдвард Очистка сточных вод травильных и
гальванических отделений. - М.: Металлургия, 1994. - 199с.
12.
Очистка промышленных сточных вод. Под ред. Кравеца В.
И.
13.
Киев.: Техника, 1994. - 240 с.
14.
Яковлев С.В. Очистка и использование сточных вод. -
М.: Стройиздат, 1993. - 164с.
15.
Ксенофонтов Б.С. Проблемы очистки сточных вод. - М.:
Знание, 1991. - 124с.
16.
Справочник по очистке природных и сточных вод. - М.:
Высшая школа, 1994. - 300 с.
17.
Терновцев В.Е. Очистка промышленных сточных вод. -
К: Будівельник, 2002.
18.
Жуков А.И., Монгайт И.Л., Родзиллер И.Д. Методы
очистки производственных сточных вод. - М.: Стройиздат, 2000. - 345с.