Использование потенциометрического эффекта для измерения физических величин
Белорусский Национальный Технический
Университет
Приборостроительный факультет
Кафедра "Информационно-измерительная
техника и технологии"
Курсовая работа
по дисциплине "Физические основы измерений"
Использование потенциометрического эффекта
для измерения физических величин
Исполнитель:
студент группы 313028
Ли В. В.
Руководитель:
Доцент
Свистун А. И.
Минск 2010
Содержание
Введение
1. Описание
потенциометрического эффекта
2. Измерение
физических величин на основе потенциометрического эффекта
Заключение
Список
использованных источников
В настоящее время широко применяются различные измерительные
преобразователи. В любом каталоге электронных компонентов они представлены достаточно
полно, причем каждый тип преобразователя имеет несколько вариантов исполнения.
Измерительный преобразователь является прибором, который преобразует
изменение одной величины в изменение другой. В терминах электроники измерительный
преобразователь определяется обычно как прибор, преобразующий неэлектрическую физическую
величину (называемую измеряемой физической величиной) в электрический сигнал, или
наоборот. Имеются, конечно, и исключения из этого правила.
Отсюда следует, что измерительные преобразователи используются
в электронных системах, т.е. в технических устройствах с электрическим сигналом,
отображающим результат измерений или наблюдений. С другой стороны, измерительный
преобразователь может быть использован на выходе системы, чтобы, скажем, генерировать
механическое движение в зависимости от электрического управляющего сигнала. Примером
реализации преобразователей является справочная система, в которой микрофон (входной
преобразователь) превращает звук (измеряемую физическую величину) в электрический
сигнал. Последний усиливается, а затем поступает на громкоговоритель (выходной преобразователь),
воспроизводящий звук существенно более громкий, нежели тот, который воспринимается
микрофоном.
Довольно часто измеряемая величина согласно ее определению просто
измеряется электронной системой, а полученный результат только отображается или
запоминается. Однако в некоторых случаях измерения образуют входной сигнал управляющей
схемы, которая служит либо для регулирования измеряемой величины относительно некоторого
заранее установленного уровня, либо для управления переменной величиной в соответствии
с измеряемой. Несмотря на очевидное частичное дублирование измерительных преобразователей
в этих двух примерах, принято различать эти области использования преобразователей,
называя их соответственно контрольно-измерительное оборудование и управляющее.
В свою очередь, эти две области подразделяются на телеметрическое
контрольно-измерительное оборудование (в котором измерительные системы используются
совместно с радио линиями связи между преобразователем и устройствами отображения
информации), химический анализ (при котором система используется для того, чтобы
определить и отобразить относительное содержание составляющих смесь веществ), процесс
управления (в котором производственный процесс, например прокат стали, контролируется
и управляется) и т.д.
Потенциометрический эффект нашёл широкое применение в технике,
на его основе работают потенциометрические датчики, преобразователи и др. Весьма
большим классом измерительных преобразователей являются резистивные преобразователи,
принцип действия которых основан на преобразовании значения измеряемой величины
в изменение сопротивления. Последнее может быть вызвано различными эффектами в преобразующем
элементе, например нагреванием или охлаждением, механическим напряжением, воздействием
светового потока (как в фотопроводящих преобразователях), увлажнением, осушением,
механическим перемещением контактной щетки реостата. Если через резистивный материал
во время изменения измеряемой величины протекает фиксированный ток, то результатом
будет изменение напряжения вдоль материала, которое отражает изменение измеряемой
величины. Одним из вариантов резистивного преобразователя является потенциометрический
преобразователь [1], в котором изменение измеряемой величины преобразуется в изменение
отношения напряжений вследствие изменения положения контактной щетки на резистивном
материале, запитываемом от внешнего источника (рисунок 1.1). Определенный механический
элемент преобразует изменение измеряемой величины в перемещение щетки. Потенциометр,
изображенный на рисунке 1.1, можно представить в виде эквивалентной электрической
схемы, как это сделано на рисунке 1.2 Его выходное напряжение определяется выражением
 , (1.1)
, (1.1)
где V1 - напряжение на входе.
Рисунок 1.1 - Резистивное преобразование, при котором используется
потенциометрическое устройство, вызывающее изменение выходного напряжения

Рисунок 1.2 - Эквивалентная схема потенциометрического устройства
Когда прикладываемое на вход прибора напряжение является постоянным
и измеряемое значение определяется положением щетки потенциометра, тогда выходное
напряжение есть непосредственно функция измеряемой величины.
В преобразователях могут использоваться потенциометрические устройства
(с одним или несколькими сопротивлениями в схеме) либо они сами являются потенциометром.
В последнем случае потенциометрический элемент будет переменным. Некоторые преобразователи
имеют непроволочные сопротивления, такие, как металлокерамическая подложка или проводящая
пластиковая пленка. Встречаются потенциометры, в которых полный диапазон изменений
положения щетки равен 270°, в то время как другие конструкции имеют диапазон в 10
или даже 20 полных оборотов (3600 или 7200°).
Для измерения положения в автомобильных системах подходят самые
различные технологии, среди которых значительное распространение получили потенциометрические
датчика угла и линейных перемещений [2, 3]. Этот тип датчиков характеризуется наличием
подвижных механических контактов, перемещение которых вдоль длины переменного резистора
изменяет его сопротивление пропорционально положению контактов, что индицируется
на выходе датчика также пропорциональным аналоговым сигналом постоянного напряжения.
Контактные датчики положения наравне с бесконтактными устройствами
сохраняют лидирующие позиции на автомобильном рынке, чему способствуют такие значительные
достижения потенциометрической технологии, как малые размеры корпуса и низкая цена,
хотя сегодня потенциометры значительно потеснены магнитными угловыми энкодерами
Холла, и будущее автомобильной сенсорики связывается именно с активными датчиками
положения и скорости [2,3,4,5].
Потенциометры представляют собой устройства, назначение которых
состоит в изменении разности потенциалов на концах участка цепи. Простейшей физической
моделью может служить проволочный реостат с подвижным контактом, включенный в электрическую
цепь. Для использования различных типов резистивных устройств в качестве датчика
необходимо учитывать разницу между реостатом, который представляет собой резистор
с переменным сопротивлением, и потенциометром, который выполняет функции делителя
напряжения (этот принцип поясняется рисунком 2.1).
Рисунок 2.1 - Физическая модель потенциометрического датчика:
j - измеряемый угол поворота; Rj - переменное сопротивление датчика; Vin,
Vout - напряжение питания и выходное напряжение, соответственно; Iout
- выходной ток
Если подвижный контакт связать с детектируемым объектом и подать
напряжение питания на крайние терминалы, потенциометр может быть использован, во-первых,
как датчик линейных или угловых перемещений j,
а во-вторых, как датчик абсолютного положения - то есть любых механических параметров
движения, определяемых по изменению или абсолютному значению разности потенциалов.
Существует очень много физических конструкций, помимо показанных
на рисунках 2.2, 2.3, 2.4, 2.6, которые позволяют изменять сопротивление потенциометра:
проволочные нити, ремни и шкивы, зубчатые стойки и шестерни, проводящая резьба,
кабельные барабаны, кулачки, конические или наклонные зубчатые колеса, обычные или
червячные зубчатые передачи и т.д. Но во всех общим является то, что сенсорный контактный
резистивный элемент представляет собой потенциометр либо реохорд.
Поскольку фиксированный элемент датчика - резистивного типа,
и изменение разности потенциалов достигается за счет изменения его сопротивления,
потенциометры относятся к резистивным датчикам. (Магниторезистивные и индуктивные
датчики переменного импеданса, к примеру, - это также варианты резистивных датчиков,
но бесконтактного типа, активируемые переменным магнитным полем).
Среди промышленно выпускаемых устройств выделяются три основные
технологии контактных резистивных датчиков:
проволочные резистивные устройства, обычно представляющие собой
проволочный реохорд или, например, в спиралевидной конфигурации, допускающие измерение
углов даже более 360° или линейные измерения
(рисунок 2.2);
потенциометры с толстопленочными резистивными дорожками, выполненными
способом нанесения на поверхность печатной платы резистивной пасты (графитовой или
углеродно-волоконной, сажи) - по радиусу или вдоль длины токопроводящего сектора,
контакт с которым осуществляется посредством контактных щеток (рисунки 2.3, 2.4);
гибридные потенциометры, в которых проводящая резистивная паста
наносится поверх проволочного спирального потенциометра (рисунок 2.7).
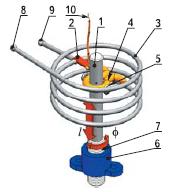
Рисунок 2.2 - Многооборотный проволочный потенциометр: вращающийся
вал - цель; 2 - контактный элемент движка; 3 - многооборотная спиральная катушка
сопротивления; 4 - движок; 5 - крепление движка к валу 1; 6 - стационарная втулка-основание;
7 - резьбовой наконечник вала для осевого перемещения вала в резьбовом отверстии
втулки 6; 8 - 10 - терминалы устройства; j
- измеряемый угол поворота; l - линейный осевой ход вала
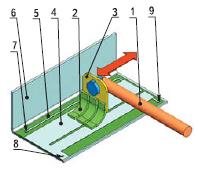
Рисунок 2.3 - Конструкция линейного датчика: 1 - вращающийся
вал - цель; 2 - контактная щетка; 3 - элемент механического крепления щеток; 4
- резистивный слой; 5 - печатная плата; 6 - корпус устройства; 7 - 9 - терминалы
устройства
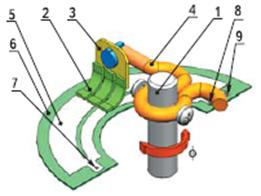
Рисунок 2.4 - Конструкция углового датчика (в диапазоне 180°): 1 - вращающийся вал - цель; 2 - контактная
щетка; 3, 4 - элементы механического крепления щеток; 5 - резистивный слой; 6 -
печатная плата; 7 - 9 - терминалы устройства
Проволочные потенциометры могут быть разнообразны по форме, которая
зависит от количества витков, способны, как явствует из рисунка 2.2, детектировать
и линейные, и нелинейные перемещения, но для многообразных угловых (или, в модели
реохорда, линейных) измерений предполагают высокий профиль и значительные габаритные
размеры.
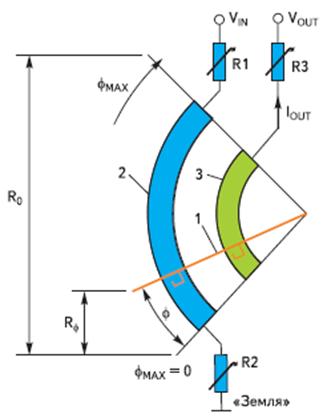
Рисунок 2.5 - Схемотехника (принцип действия) углового толстопленочного
потенциометрического датчика (в диапазоне до 360°):
1 - скользящий контакт (движок или контактная щетка); 2 - резистивная дорожка; 3
- контактная дорожка; j - измеряемый угол
поворота; R0 - максимальное сопротивление датчика; R1,
R2 - трассировочные резисторы; R3
- нагрузочный резистор; Vin, Vout - напряжение питания и выходное
напряжение, соответственно; Iout - выходной ток
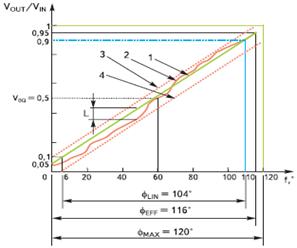
Рисунок 2.6 - Нормализованная выходная передаточная характеристика
аналогового углового потенциометрического датчика положения дроссельной заслонки:
j - механический угол поворота; Vout - выходное
напряжение; V0Q - среднеквадратическое напряжение; jmax - максимальный механический
диапазон угла вращения; jeff - эффективный электрический угол (полный диапазон);
jlin
- линейный участок кривой (рабочая зона); 1 - идеальная выходная характеристика;
2 - неидеальная выходная характеристика; 3, 4 - границы допусков линейности
Рисунок 2.7 - Конструкция гибридного потенциометра: 1 - вращающийся
вал - цель; 2 - контактная щетка; 3 - элемент механического крепления щеток; 4
- резистивный слой, контактирующий с проводящей резиной 6 и спиральной проволочной
катушкой сопротивления 8; 5 - измерительная дорожка, отделяемая от проводящей резины
слоем изоляционного материала 7; 9 - оправка катушки; 10 - 12 - терминалы устройства
Прежде чем детально анализировать особенности, достоинства и
недостатки технологии толстопленочных потенциометров (рисунки 2.3, 2.4, 2.5, 2.6),
которые сегодня чрезвычайно широко распространены в автоэлектронике, необходимо
отметить, что возможно и объединение обеих технологий с так называемыми hybrid coil
- гибридными резисторными катушками-спиралями, допускающими многооборотные изменения.
Гибридный резистивный элемент представляет собой резистор wirewound, поверх которого
нанесена проводящая пластмассовая или резиновая паста, что делается для достижения
бесконечного (в теории) разрешения (рисунок 2.7) и максимальной функциональной точности.
Хотя концептуальный эскиз автора на рисунке 2.2 также иллюстрирует возможность получения
бесконечного разрешения с резистором wirewound-типа, на практике большинство конструкций
wirewound-резисторов позволяют получить только скачкообразное дискретное разрешение,
если датчик линейных перемещений используется как реостат в схеме делителя напряжения.
На рисунке 2.7 показано, как скачкообразность разрешения устраняется в гибридной
катушке сопротивления. Линейные перемещения могут быть эквивалентны многооборотному
угловому движению, как показано на рисунке 2.2, для которого линейное перемещение
движка выполняется в осевом направлении. Кроме того, гибридные катушки позволяют
повысить срок службы потенциометров, который для резисторов wirewound-типа сейчас
достигает 2 млн циклов, и занять промежуточное положение по этому параметру между
wirewound-резисторами и толстопленочными потенциометрами (для которых срок службы
может быть свыше 8 млн циклов). Потребляемая мощность - порядка нескольких Вт, сравнимая
с wirewound-резисторами, температурная стабильность - также превосходная, как у
wirewound-потенциометров.
В типичном толстопленочном автомобильном резисторном датчике
к его движущейся части, такой как установочная втулка датчика угла, жестко механически
связанной с валом управляющего привода или активатора клапана, прикрепляется подвижный
рычаг - токосъемник, одновременно осуществляющий скользящий электрический контакт
подвижных контактирующий щеток с резистивным слоем (рисунки 2.1, 2.3, 2.4, 2.5)
[2]. Помимо резистивного элемента - дорожки на печатной плате, движка, управляющего
вала - корпус устройства включают также подшипники, например шариковые, и уплотнение,
а также возвратную пружину (на рисунках 2.1 - 2.7 эти элементы не показаны).
Питание датчика осуществляется от источника постоянного напряжения
Vin. Для защиты датчика от перегрузок напряжения питания последовательно
включаются переменные резисторы R1, R2. В датчик также могут
включаться подстроечные переменные резисторы или постоянные резисторы при индивидуальной
настройке устройства.
При перемещении скользящего контакта по радиусу токопроводящего
сектора поверх резистивного слоя потенциометра его выходное сопротивление Rj изменяется пропорционально углу поворота
детектируемого объекта j (как показано на
рисунках 2.1, 2.3, 2.5). Очевидно, этот тип датчиков может быть легко линеаризован
простым разворачиванием кругового сектора вдоль его длины.
Потенциометрическое напряжение благодаря пропорциональной связи
между длиной дорожки с ее электрическим сопротивлением и, в соответствии с законом
Ома, представляет собой линейное постоянное напряжение Vout
(рисунки 2.1, 2.5, 2.6).
Чем ближе находится движок к уровню напряжения питания Vin,
тем выше выходной сигнал датчика Vout. На выходе устройства пропорциональный
выход напряжения Vout снимается с использованием высокоимпедансной нагрузки
(порядка нескольких сотен кОм). Напряжение движка должно подключаться, например,
также к высокоимпедансному операционному усилителю. Стандартное подключение подвижного
контакта выполняется с помощью второй контактной дорожки, состоящей из того же резистивного
материала. Во избежание износа и погрешности измерений ток в зоне контакта минимизируют
(Iout желательно устанавливать менее 1мкА, но в спецификациях современных
устройств это значение может достигать нескольких мА или десятков или сотен мА).
Проволочные спирали wirewound coils или гибридные угловые датчики
функционируют аналогично толстопленочным (в концепции, представленной на рисунке
2.2, теоретически даже возможна навивка второй спирали для имитации второй контактной
дорожки - измерительной); преимущество в том, что детектирование угла j при спиральном перемещении движка возможно в
пределах всей высоты спирали.
Хотя толстопленочные потенциометры могут измерять угловые диапазоны
только в пределах 360°, причем с неизбежной
мертвой зоной, этого оказывается достаточно для стандартных автомобильных угловых
задач, при этом датчики просты в эксплуатации и конструировании, отличаются низкой
ценой, достаточным сроком службы, что и объясняет их наиболее широкую популярность
в автоэлектронике.
В спецификациях автомобильных толстопленочных потенциометров
часто вводится определение положительной и отрицательной независимой линейности
(на рисунке 2.5 обозначена буквой L) - максимального отклонения (положительного
и отрицательного) выходного напряжения от теоретической прямой линии ±Vout_max. Причем наклон (градиент) и точки пересечения теоретической
прямой с реальной характеристикой обычно производителями выбираются так, чтобы суммарная
ошибка ±Vout_max была минимизирована или отрицательные
и положительные отклонения - DVout_max и +DVout_max были равны.
Для вычисления независимой нелинейности используются как абсолютные
отклонения выходного напряжения ±DVout_max, так и отклонения от прямой линии нормализованной характеристики
Vout / Vin (j) выходного
напряжения, отнесенного к входному напряжению, в зависимости от механической входной
величины -
Типичные значения ошибок этой, обычно нормализованной величины,
выражаемые в процентном отношении, составляют сегодня менее 0,5% - до 0,02%. При
составлении спецификаций, как правило, измеряется разница между характеристиками
рассматриваемого и эталонного потенциометра.
В отличие от независимой линейности, абсолютная нелинейность,
которую также приводят в спецификациях датчиков, используют не переменный, а полностью
определенный наклон, причем с индексной точкой, однозначно определяющей соотношение
между входной величиной и выходным напряжением или нормализованной характеристикой
Vout / Vin (j) (как
правило, индексная точка задается на середине механического диапазона и пересечении
теоретической кривой с фактической передаточной характеристикой). Абсолютная нелинейность
потенциометров лежит в пределах 2%. Эта цифра нелинейности может только приблизительно
оценить точность устройства - в диапазоне 120°
при наклоне передаточной характеристики в 45°
двухпроцентная погрешность соответствует 2,4°.
Поскольку существуют и другие факторы, снижающие точность, например, смещение и
гистерезис, разброс входного и выходного сопротивления, помехи при передаче сигнала,
в действительности ошибка может быть еще больше. Все же по стабильности этого параметра
в полном диапазоне потенциометры функционируют лучше стандартных датчиков Холла.
Потенциометры, имеющие выходную характеристику, подобную показанной
на рисунке 2.6, в полном механическом диапазоне - от нулевого до максимального механического
угла поворота (jmax)
или максимального линейного хода (Imax) подвижной
системы датчика, предлагают больший в сравнении с датчиками Холла полный диапазон
эффективного электрического угла поворота подвижной системы jeff, хотя
выходное напряжение при положении движка около верхней границы дорожки вблизи терминала
Vout обычно не измеряется;
кроме того, отношение Vout /
Vin (D)
никогда не достигает единицы.
В спецификациях потенциометров также может быть рекомендован
функциональный диапазон - участок с наибольшей линейностью (jlin), определяемый, например,
по заданным предельным уровням выходного напряжения. Для угловых датчиков общим
является то, что при аксиальном смещении осей вала привода и вала углового датчика
будет возникать систематическая ошибка линейности, которая увеличивается в том случае,
если соединительный радиус уменьшается относительно эксцентриситета вращения. Максимальная
относительная ошибка линейности определяется выражением
Lmax = e
/pr,
(2.1)
где е - эксцентриситет (эллипса - отношение расстояния между
фокусами эллипса к длине его большей оси, или, для гиперболы, отношение расстояния
между фокусами к расстоянию между вершинами);
r - радиус механического соединителя датчика и управляющего вала.
Поэтому любые механические ошибки и смещения для улучшения линейности
желательно сводить к минимуму.
Но преимуществом датчика Холла является бесконтактность, а резистивные
технологии (и wirewound coils, и потенциометры с резистивными дорожками, и гибриды)
являются контактными, что означает непосредственный механический контакт движущейся
части, осуществляющей формирование электрического сигнала, с неподвижной электрической
частью. Следовательно, резистивные датчики подвержены старению и износу. Чувствительность
к угловому или линейному перемещению или градиент передаточной характеристики),
определяемая как единичное приращение передаточной характеристики (наклон или фактор
масштаба первичной или выходной (усиленной) кривой) изменяется, причем иногда в
большую сторону:
S = DVout / Dj, мВ/°,
(2.2)
или S = DVout / Dl, мВ/мм.
(Так как сопротивление при износе увеличивается, значит, при
постоянном Iout и R3 увеличивается и Vout, и DVout), но,
вообще говоря, чувствительность изменяется неравномерно.
Из-за того, что потенциометры - устройства контактного типа,
они могут иметь заметный гистерезис, при этом зависят от вибрации. Работа контактов
сопровождается акустическим и электромагнитным шумом, хотя эти недостатки могут
и не вносить значительного вклада в ухудшение рабочих характеристик датчика.
Важный качественный критерий потенциометра - его контактное сопротивление,
или сопротивление между терминалом движка и точкой незамедлительного контактирования
с резистивным слоем. Контактное сопротивление может быть разделено на три компонента
[6]:
интегральное падение напряжения между токонесущей дорожкой и
поверхностью контакта (порядка сотен Ом), практически полностью определяемое технологией
производства;
внешнее переходное сопротивление вследствие неидеального перехода
между движком и потенциометрической дорожкой из-за присутствия непроводящих материалов
в элементах контактирования - оксидов, хлоридов, сульфидов металла, смешанных с
органическими веществами, поэтому контроль качества материалов в потенциометрической
технологии имеет первостепенное значение;
динамические силы, воздействующие на движок при высокоскоростной
работе, что предотвращает демпфирование движков; с демпфированием достижима скорость
работы до 10 м/с.
Ток Iout, протекающий через движок, оказывает значительное
влияние на нелинейность характеристики. Так, ток движка порядка 10 мкА и контактное
сопротивление в 10 кОм для потенциометра с номинальным сопротивлением 2 кОм дадут
постоянную нелинейность в 1,1%. Сходная ситуация возникает при подключении омической
нагрузки.
Величина компактного сопротивления и износ определяют число циклов
работы потенциометра. Многие современные потенциометры могут обеспечить порядка
8 млн полных циклов и до 300 млн циклов дрожания. Косвенно этот параметр определяется
температурой, влажностью, механическими воздействиями и химическими веществами.
Стандарты для определения надежности не могут определить износ
или увеличение контактного сопротивления при данном числе циклов, поскольку эти
факторы дополнительно искажаются неодинаковым воздействием в различных применениях
перечисленных ранее параметров. Например, могут быть использованы следующие методы
испытаний [6]:
с очень малыми перемещениями движка симулируется работа в системах
обратной связи; перемещение движка - порядка ±2°, частота тестирования 100 Гц. Этот тест дает
результат контактной надежности и отслеживает любое изменение градиента в микродиапазоне,
причем на такой, достаточно высокой для автомобильного потенциометра частоте может
воспроизводиться 8,6 млн циклов ежедневно;
второй тест, или испытание половины хода, дает информацию относительно
изменений линейности, смещения нулевой точки и износа движка. Испытание выполняется
на частоте 10 Гц (0,86 млн циклов ежедневно) над 50% длины дорожки. Это дает максимальное
изменение линейности, которое позволяет судить об износе. Критерием сброса является,
например, удвоение линейности при максимальном контактном сопротивлении относительно
состояния нового контактного сопротивления.
Помимо стандартных характеристик, общих для всех датчиков, для
потенциометров существует также определение гладкости характеристики, стандартизованное
институтом Variable Resistive Components Institute (VRCI).
С контактными потенциометрами абсолютная гладкость недостижима, причем определения
стандартов VRCI компания Novotechnik находит неадекватным для полного системного
анализа, используя для сбора статистики собственные определения гладкости, микролинейности
и отрицательных вариаций наклона (RGV) [6].
Гладкость измеряется как отклонение от закономерности характеристики
выходного напряжения в пределах данного приращения пути с определенным шагом порядка
1% и выражается в процентах от приложенного напряжения.
Определение гладкости VRCI предполагает использование полосового
фильтра для подавления ошибок линейности, потенциометр при этом нагружается сопротивлением
порядка 100Rp.
Недостатки этого метода следующие:
1. Использование фильтра создает предпосылку того, что абсолютная
скорость движка и ее изменения влияют на значения гладкости. Фильтр, частично интегрирующий
и дифференцирующий, дает неточную запись кривой гладкости.
2. Нагрузка, прикладываемая к потенциометру, также вкладывает
ошибку, вызывая вариации контактного сопротивления, которое больше с движком на
конце дорожки, к которому прикладывается напряжение, и меньше на заземленном конце.
3. Использование окна оценивания в 1% уже недостаточно для современных
применений.
4. Иногда произвольный выбор типов фильтров, сопротивления нагрузки
и инкремента пути дает значения гладкости, не сравнимые между собой.
В 1978 году компания Novotechnik ввела определение микролинейности,
это максимальное отклонение вариаций линейности в пределах пути или углового приращения.
Приращение, как при определении гладкости, составляет 1% от электрического диапазона.
Инкременты пути накладываются на кривую линейности с перекрытием,
как минимум, в 50%. В отличие от изменений гладкости, ошибка представляет собой
чистую максимальную ошибку линейности. Микролинейность, вообще говоря, не позволяет
судить о том, подходит ли данный потенциометр для конкретного применения, поскольку
могут иметь место вариации градиента (чувствительности) - RGV.
Если в данной точке характеристики градиент более крутой, чем
средний, в этом положении более высокий прирост/усиление обратной связи будет приводить
к колебаниям обратной связи. Если градиент в данной точке менее крутой, чем средний,
повторяемость будет снижена, и, следовательно, снизится точность. Соотношение локальных
вариаций градиента потенциометра и может использоваться для сравнения различных
устройств.
Флуктуации RGV, измеренные с шагом в 1 мкм с контактными потенциалами
Novotechnik, распределены нормально, причем с увеличением шага вариации среднего
градиента STDEV снижаются. Показано также, что RGV представляют собой функцию шага
измерений, аппроксимируемую функцией квадратного корня:
RGV (X) / RGV (Y) = (Y / X) 0.5STDEV,
(2.3)
RGV могут служить
качественной характеристикой потенциометра. Функциональное соотношение также характеризует
максимальное разрешение потенциометра, которое, фактически, не бесконечно, хотя
в теории и по заявлениям производителей это так. В кривой RGV как функции шага измерений
могут присутствовать и сбойные положения, являющиеся оценочными критериями стабильности
и повторяемости системы.
RGV, как говорилось, используются для
оценки разрешения [6]. Разрешение - это минимальный порог чувствительности устройства,
определяемый механикой или схемой цифровой обработки сигналов.
При измерении значений RGV до 20 потенциометров при серийном
производстве с шагом в 0,1° получаются значения
RGV порядка ±10% от среднего градиента.
Если как предел разрешения специфицировать значения RGV порядка ±10% от среднего градиента. Если как предел разрешения
специфицировать значения RGV в ±100%, в
соответствии с выражением (2.3) 10% будут соответствовать 1/1000°. Разрешение определяется однородностью (зернистостью)
резистивного слоя и параллельностью контактной поверхности контакта движка эквипотенциальным
линиям, а также током движка.
Другие важнейшие характеристики потенциометра - это гистерезис
и повторяемость.
Гистерезис - смещение передаточной характеристики в вертикальной
оси, значение которого определяет дифференциал сигнала напряжения; гистерезис случается,
если предписанное положение было пройдено при движении с одной стороны, а затем
то же самое положение приближается с другой стороны.
Гистерезис определяется главным образом механическими факторами,
такими, как подшипники, для потенциометров - и жесткостью движка, коэффициентом
трения между проводящим слоем и движком, для магнитоуправляемых датчиков - также
гистерезисом при перемагничивании магнитной системы; для пороговых датчиков с триггером
Шмита гистерезис вводится специально. Жесткая механическая связь, уменьшающая гистерезис,
достигается за счет введения в датчик пружины.
Для любых датчиков, контактных или бесконтактных, является фактом,
что кривая в одном направлении и в противоположном смещена с некоторым постоянным
гистерезисом.
Повторяемость - характеристика передаточной кривой, посредством
которой определяется перемещение к предписанному положению при движении в том же
самом направлении.
При движении из разных направлений используется термин
"воспроизводимость" или сумма (двукратное разрешение, суммирование с гистерезисом)
[6]. Обе характеристики (повторяемость и воспроизводимость) важны для датчиков как
с прямым, так и с обратным ходом.
Во многих листах данных, выпущенных производителями потенциометров,
указывается ТКС (температурный коэффициент сопротивления) и коэффициент влажности
номинального сопротивления. Если же потенциометры используются как делители напряжения,
значения, приводимые в спецификациях, могут быть несоответствующими. Детальные измерения,
проведенные Novotechnik, показали, что реальные значения для ТКС составляют порядка
200 ppm/°C и коэффициент влажности сопротивления составляет до 500 ppm/% RH [6]. Причем с потенциометрами
- делителями напряжения - эти значения могут быть на два порядка ниже, то есть менее
5 ppm/°C и порядка 5 ppm/% RH, соответственно, в полном диапазоне рабочих
температур и влажностей. Но эти значения могут быть достигнуты только с подходящей
защитой корпуса и при отсутствии компенсирующих сопротивлений в схеме. Помимо влажности,
щеточные потенциометры с контактными дорожками чувствительны и к загрязнениям (пыли),
что также устраняется за счет повышения степени защиты корпуса.
Электрические измерения являются главным источником получения информации
в промышленности и других отраслях народного хозяйства; они используются во многих
научных экспериментах, в медицине, конструировании новейших технологических устройств
и др.
Говоря о датчиках, построенных на основании потенциометрического
эффекта, следует отметить, что специальные конструктивные и технологические приемы
позволяют избавляться от недостатков потенциометров. Все резистивные технологии
(wirewound и потенциометры с резистивными дорожками, а также гибриды) допускают
достаточный диапазон угловых и линейных измерений, подходят для высокотемпературной
работы и, с достаточно высокой степенью защиты корпуса - в жестких условиях эксплуатации,
обеспечивают стабильный линейный выход.
Преимуществом большинства датчиков, созданных на базе новых технологий,
является бесконтактность, но, несмотря на это, потенциометры,
созданные на основании потенциометрического эффекта, не скоро
сдадут свои рыночные позиции, поскольку имеют низкую цену и увеличенную надежность,
обеспечивают достаточно высокие рабочие характеристики, позволяющие полностью справляться
с типичной задачей.
1. Бриндли, К. Измерительные преобразователи: справочное пособие / К.
Бриндли. - Москва: Энергоатомиздат. - 1991. - 144 с.
2. Сысоева, С. Автомобильные датчики положения. Современные технологии
и новые перспективы. Часть 1. Потенциометры и датчики Холла - лидеры современного
рынка // Компоненты и технологии. - 2005. - №2.
3. Сысоева, С. Автомобильные датчики положения. Современные технологии
и новые перспективы. Часть 14. Итоговый сравнительный анализ. Выводы и обновление.
// Компоненты и технологии. - 2006. - №7.
4. Сысоева, С. Новые тенденции и перспективные технологии автомобильных
датчиков систем Powertrain и контроля эмиссии. Часть 1. Состояние и перспективы
рынка датчиков положения, скорости, датчиков концентрации кислорода (газа), массового
расхода воздуха и давления // Компоненты и технологии. - 2006. - №7.
5. Сысоева, С. Рекомендации производителям автомобильных цифровых датчиков
скорости и положения. Часть 2. Новые рекомендации по разработке датчиков с магнитным
ротором // Компоненты и технологии. - 2007 - №2.
6. Техническая информация компании Novotechnik // [Электронный ресурс].
- Режим доступа: http://www.novotechnil.us/tech_ref.html.