мм
b1 =
2p(75
– 1*1)/11,01= 42,02
b2 =
2p(75
– 1*3)/11,01 = 41,07
b3 =
2p(75
– 1*5)/11,01 = 39,93
b4 =
2p(75
– 1*7)/11,01 = 38,9
b5 =
2p(75
– 1*9)/11,01 = 37,65
b6 =
2p(75
– 1*11)/11,01 = 36,5
3.5
Расчёт произведён
правильно, т.к. bk>[b]
4.
Расчёт для
относительной погрешности
e = 2 при 45о < Q <
Qmax
4.1 Находим
угол поворота элемента настройки, соответствующий заданной величине абсолютной
погрешности DА, исходя
A1
= Amax – 2*DA = Amax –2*e* Amax /100% = 70 - 2 * 2
* 70 / 100 = 67,2 Дб
Q1 = arccos 10A1 / M =
arccos 1067,2 / -45 = 88,161°
4.2 Выбираем
допустимую погрешность перемещения на ручке настройки из условия [djn] = 1...1.5o. Полагаем [djn] = 1о.
4.3 Расчитаем величину
коэффициента замедления
i = [djn] / djn = [djn] / (Qmax - Q1) = 1 / (88,384-88,161) = 2,23
4.4 Проводим расчёт
шкалы, исходя из длины деления
[b] = 1...1.5мм. Положим [b] = 1.5мм
4.5 Цена деления
H = 2*DA=2*Amax*e/100 = 2*70*2/100 = 2.8Дб
4.6 Число делений
шкалы
N = A/H = 70
/ 2,8 = 25
4.7 Число оборотов
шкалы при угле поворота элемента настройки
Qmax = 88,384°
K = Qmax i/2p = 88,384*2,23/360=0,55
4.8 Число делений на
каждом обороте
N’ = N / K = 25 / 0,55 = 45,4
4.9 Наименьшая длина
деления шкалы при наибольшем радиусе шкалы
Ro =
Dш / 2 =150/2=75 мм
и далее
очерченной дугами окружностей будет на каждом полувитке
bk ’=2pRm / N’= 2p(Ro – (t/4)*m)
/ N’
где t – шаг спирали шкалы
b1 =
2p(75
– 2*1)/45,4 = 10,1
b2 =
2p(75
– 2*3)/45,4 = 9,5
b3 =
2p(75
– 2*5)/45,4 = 8,9
b4 =
2p(75
– 2*7)/45,4 = 8,4
b5 =
2p(75
– 2*9)/45,4 =7,9
b6 =
2p(75
– 2*11)/45,4 = 7,3
и далее
очерченной дугами окружностей будет на каждом полувитке
где t – шаг спирали шкалы
t = 8 мм
4.10 Расчёт произведён
правильно, т.к. bk>[b], где [b] = 1.5мм
6. Описание
конструкции шкалы
Конструкция отчетного устройства с
многооборотной шкалой в основном аналогична отчетному устройству с
однооборотной шкалой. Отличие состоит в кинематической связи между вращением
шкалы 1 и перемещением указателя 2 в радиальном направлении за один оборот
шкалы, которое равно одному шагу спирали. Это обеспечивается вхождением
выступов с одной стороны указателя в прорезь спирали шкалы, а выступа с другой
стороны указателя в направляющие 3 держателя шкалы (рис. 4).
Шкалу со спиралью изготавливают из
металла, шкалу изготавливают из оргстекла. На оргстекло наносим оцифровку.
Надписи на шкале
Рис.4
выполняем шрифтом по ГОСТ 2930-62.
Технические требования к конструкции шкалы
1.
Число делений
шкалы – 125. Шкала содержит 37 главных отметок, которые делятся средней
отметкой пополам.
2.
Допустимое
смещение отметок от номинала ±3
3.
Риски и цифры
гравируют. Ширина рисок – 0,2мм, глубина – 0,85мм. Шрифт надписей ПО-5 по ГОСТ
2930-62. Гравировку заливают эмалью.

Рис.5
Разметка на
многооборотной шкале наносится с учётом проведённых расчётов. Шкала
закрепляется на валу с помощью штифта. Шкалу и спиральную шкалу соединяем
склеиванием.
7. Расчёт червячной
передачи
Исходные данные:
Передаточное число червячной передачи
Заходность червяка
Число зубьев на червяке
Модуль зацепления
Z2 = 48
M = 1
|
7.1 Расчёт параметров
зацепления
7.1.1 Межосевое
расстояние
aw = 0.5M(Z2 + q) = 0.5*1(48+20) = 34
где q – коэффициент диаметра червяка. Он
выбирается из специального ряда. Примем = 20, т.к. необходимо повысить
жёсткость червяка.
7.1.2 Принимаем hа* = 1 по ГОСТ 9036 – 73.
7.1.3 Передаточное
число U = 12.
7.1.4 Модуль
зацепления M = 1
7.2 Расчёт червяка
7.2.1 Длина нарезанной
части червяка
b1 ³ (12.5+0.09*Z2)*M
b1 ³ (12.5+0.09*48)*1 = 16.89; b1 = 17
На конце нарезной части
выполняют фаски под углом 20о. Обеспечение жёсткости – основное
условие, предъявляемое к конструкциям червяков. Поэтому расстояние между
опорами вала – червяка принимают по возможности минимальным.
7.2.2 Находим
делительный угол подъёма витка
tgg = Z1 /q
g =
arctg Z1 /q = arctg 4/20 = 11.3°
7.2.3 Находим высоту
витка
h = (2 hа* + cos20° )M = 2.25*1 = 2.25
7.2.4 Находим
делительный диаметр червяка
d = q*M = 20*1 = 20
7.2.5 Определяем
диаметр вершин витков
da1 = d1 + 2M = 20
+2 =22
7.2.6 Находим диаметр
впадин витков
df1 = d1 - 2.5M = 20
–2.5 = 17.5
7.2.7 Находим шаг
червяка
p = pM = 3.14
7.2.8 Ход витка
рассчитываем по известному модулю зацепления
pz1 = p* Z1 = 3.14*4 = 12.56
7.2.9 Выбираем
архимедов червяк и правое направление линии витка
7.2.10 Определяем
коэффициент смещения
x = aw /M – 0.5(Z2
+q) = 34 – 34 = 0
Отношение фактического
передаточного от заданного составляет не более 4% . Червяк изготавливается из
стали 45 в соответствии с ГОСТ 1050 – 74.Диаметр не нарезанной части червяка
выбирают таким образом, чтобы обеспечивать выход инструмента по возможности
свободным при обработке витков.
7.3 Расчёт червячного
колеса
7.3.1 Определяем
делительный диаметр колеса
d2 = Z2 *M = 48*1 = 48
7.3.2 Диаметр вершин
зубьев определяем по формуле
da2 = d2 + 2M = 50
7.3.3 Вычисляем
диаметр впадин зубьев
df2 = d2 - 2.5M =
45.5
7.3.4 Наибольший
диаметр червячного колеса
dam2 £ da2 + 6M/Z1
+ 2 = 50 + 6/4 + 2 = 53.5; dam2 = 52
7.3.5 Ширина венца
зубчатого колеса
b2 £ 0.67da1 = 14.74; b2 = 14
7.3.6 Угол обхвата
червяка колесом выбираем в зависимости от назначения передачи
2d = 22 … 66°
В связи с большим
диаметром отверстия в колесе полагаем.
7.3.7 Определяем
радиус выемки поверхности вершин зубьев
R = 0.5q – M =
0.5*20 –1 = 9
Зубчатый венец
изготавливается из бронзы и насаживается с натягом на стальное кольцо. Марка
бронзы БРАК – 9 – 4Л по ГОСТ 1586 – 70. Кольцо насаживаем с натягом на
поверхность волновода.
7.3.8 Определяем
радиусы закруглений впадин и вершин зубьев
Pf2 = 0.3M = 0.3; Pk2 = 0.1M = 0.1
7.3.9
Допуски на размеры
червяка и колеса назначены в соответствии с таблицей по ГОСТ 9368 – 60.
Соединение в натяг можно получить непосредственно после изготовления колеса.
8. Выбор диаметра вала
– червяка
Диаметр вала определяем
из условия прочности на кручение, а изгиб учитывается путём снижения допустимых
напряжений
d ³ = 2
где Mk–крутящий момент, выбираемый из
конструктивных соображений Mk =
20
[t] - допускаемое напряжение [t] = 20 мПа
В связи с тем, что вал
изготавливают заодно с червяком принимаем d = 12мм. В процессе разработки конструкции вала размеры
назначают исходя из конструктивных соображений. Номинальные диаметры всех
посадочных мест согласуют со стандартным рядом номинальных размеров. Для
повышения технологичности конструкции размеры галтелей и размеры фасок на одном
валу принимают по возможности одинаковыми. Ширина канавок для выхода инструмента
также будем принимать одинаковой. В местах изменения диаметра вала выполняем
плавный переход-галтель постоянного радиуса. Для уменьшения концентрации
напряжений разность между диаметрами ступеней вала должна быть минимальной, а
радиус галтели максимальным. На чертеже также показаны предельные отклонения
размеров, допуски форм и расположение поверхностей, параметры шероховатости,
указания о материале, другие сведения, необходимые для изготовления детали.
Требования к шероховатости сопрягаемых поверхностей устанавливают исходя из
величины назначенного допуска. Максимально необходимую шероховатость
поверхности детали можно определить по заданному допуску в справочнике.
9. Выбор типа подшипников
для вала червяка
Принимаем предварительно
подшипник шариковый радиально-упорный легкой серии 36100 с углом a=12°.
Fr1 = Fr2 = 10.517H; Fa = 40.17H
Частота вращения вала n = 300 об/мин. Требуемая
долговечность подшипника L =
6300 час. Диаметр посадочной поверхности d = 10 мм.
Для этого подшипника на
стр.201 в книге [3] по таблице находим:
С = 5030 – динамическая
грузоподьемность
Со = 2180 –
статическая грузоподьемность
Определяем отношение :
Fa /Co = 40.17/2180 = 0.02
X = 0.014; Y = 1.81; l =
0.3
Эти значения находим для
заданного отношения по таблице в учебнике [2]. Находим отношение
Окончательно принимаем
X = 0.014: Y = 1.81
Определяем эквивалентную
динамическую нагрузку. Принимаем значения коэффициентов Kr = 1; Kб = 1.3 в соответствии с таблицей учебника [3].
Pf =(VXFr+YFr)*Kr*Kб =(1*0.014*10.517+1.81*40.17)*1*1.3 Kr =50.81H
Определяем требуемую
грузоподьемность по формуле:
Cmp =
Pf = 47.48H
Так как Cmp< C, то данный подшипник подходит. Характеристики подшипника:
d = 10мм; B = 8мм; r =
0.5мм; D = 26мм; a = 20°
Способ установки
подшипников на валах показан на сборочном чертеже аттенюатора.
10. Выбор типа подшипника для
подвижного волновода
Выбираем предварительно
шариковый радиальный подшипник особо легкой серии 107.
Для этих подшипников из
таблицы в учебнике [2] находим, что
Co = 15900H - динамическая грузоподьемность.
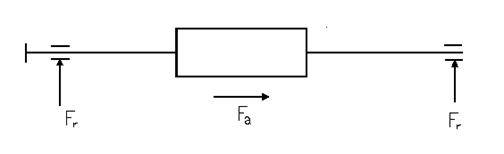
Так как подшипник
радиальный, то осевая составляющая равна 0. Из условия равновесия находим
Fa = 40.17H; Fr = 17.1 H
Находим отношения по
таблице в учебнике [3] находим, что
X = 0.56; Y = 2.3; l =
0.19
Находим отношение
Fa /VFr = 40.17/17.2 = 2.54,
что больше l = 0.19.
Окончательно принимаем X = 0.56; Y = 2.3.
Находим эквивалентную
динамическую нагрузку
Pe =
(Fr *XV + XFa )* Kб *Kr
Принимаем Kr = 1 (температура подшипника меньше
100°C;
Kб = 1, см. таблицу в учебнике 2 ).
Pe = (1*0.56*17.1 + 2.3*40.17) = 40.263H
Определяем требуемую
динамическую грузоподьемность
Cmp =
Pe = 49.574H
Так как Cmp< C, то предварительно выбранный подшипник подходит. Этот
подшипник имеет следуюшие характеристики:
d = 31,5мм; B = 14мм; r =
1.5мм; D = 62мм;
C = 15900H; Co =
8500H.
Литература
1.Элементы приборных устройств
(курсовое проектирование) в 2-х частях под ред. О.Ф. Тащенко. М. «Высшая школа»
1978.
2.Дунаев П.Ф. Конструирование
узлов и деталей машин. – М.: «Высшая школа» 1978.
3.«Справочник конструктора
точных приборов» под. Ред. Н.Я. Левина. М.: «Машиностроение» 1964.
4.Курсовое проектирование
механизмов РЭС: Учебное пособие для вузов по спец. «Конструирование и технолог.
радиоэлектр. средств»/ В.В. Джамай, И.П. Плево, Г.И. Рощин и др.; Под ред. Г.И.
Рощина. – М.: «Высшая школа», 1991.