Механизмы компрессора
КУРСОВОЙ ПРОЕКТ
на тему: «Механизмы
компрессора»
1.
Структурный анализ механизмов
1.1 Структурный анализ рычажного механизма
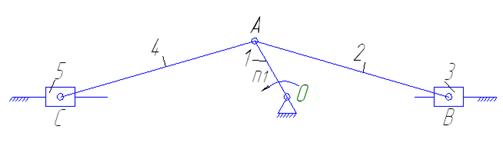
Рисунок 1.1. Подвижные
звенья механизма
1-кривошип
2-шатун
3-ползун
4-шатун
5-ползун
Кинематические
пары.
О (0-1),вр.,5
кл.
А (1-4),вр.,5
кл.
А'(1-2),вр.,5
кл.
В (2-3),вр.,5
кл.
В'(3-0),пост.,5
кл.
С (4-5),вр.,5
кл.
С'(5-0),пост.,5
кл.
Найдём число
степеней свободы.
Запишем
формулу Чебышева.
W=3∙n-2∙P5-P4 (1.1)
Где, W-число степеней свободы,
n-число подвижных звеньев,
P4 - число пар 4-го класса,
P5 - число пар 5-го класса.
W=3∙5-2∙7=1
Число
степеней свободы рычажного механизма равно 1.
Разобьём
механизм на группы Асура и рассмотрим каждую группу в отдельности.
 Группа 2-3 (Рисунок 1.2)
Группа 2-3 (Рисунок 1.2)
A'(1-2)-внешняя
B'(3-0)-внешняя
B (2-3)-внутренняя
W=3∙2-2∙3=0
II кл. 2 вид Рисунок 1.2
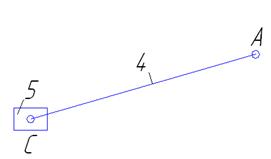 Группа 4-5 (Рисунок 1.3)
Группа 4-5 (Рисунок 1.3)
А (1-4)-внешняя
С' (5-0)-внешняя
C (4-5)-внутренняя
W=3∙2-2∙3=0
II кл. 2 вид
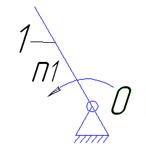
O (0-1)
W=3-2=1
Рисунок 1.4
Составим
структурную формулу: 
Механизм
является механизмом 2кл.,2в..

Рисунок 1.5.
Подвижные звенья механизма
1 – центральное
колесо
2 – сателлит
3 – зубчатое
колесо
H – водило
4 – зубчатое
колесо
5 – зубчатое
колесо
Кинематические
пары.
(1-0),вр.,5
кл.
(5-0),вр.,5
кл.
(2-H),вр.,5 кл.
(4-0),вр.,5
кл.
(1-2),вр.,4
кл.
(2-3),вр.,4
кл.
(4-5),вр.,4
кл.
Найдём число
степеней свободы.
Исходя из
формулы Чебышева имеем,
W=3∙4-2∙4-3=1
Число
степеней свободы зубчатого механизма равно 1, следовательно, данный механизм
является планетарным.
1.3 Структурный анализ кулачкового механизма
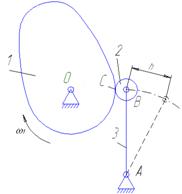
Рисунок 1.6. Подвижные
звенья механизма
1-кулачок
2-ролик
3-коромысло
Кинематические
пары.
О (1-0),вр.,5
кл.
А (3-0),вр.,5
кл.
В (2-3),вр.,5
кл.
С (1-2),пост.,4
кл.
Найдём число
степеней свободы.
W=3∙n-2∙P5-P4
W=3∙3-2∙3-1=2
Число
степеней свободы равно 2.
Так как W≠1, то присутствует
лишнее звено - ролик.
2.
Динамический анализ рычажного механизма
2.1 Определение скоростей
Для заданной
схемы механизма строим 12 положений.
Определяем
масштабный коэффициент построения механизма:
 (2.1)
(2.1)
где, - масштабный коэффициент,
- масштабный коэффициент, 
 - длина звена,
- длина звена, 
 - длина звена на чертеже,
- длина звена на чертеже, 
Запишем
длинны звеньев механизма на чертеже

Приступаем к
построению повёрнутых планов скоростей для каждого положения. Рассмотрим пример
построения для положения №5:
У кривошипа
определяем скорость точки А
 (2.2)
(2.2)
где,  - длина звена,
- длина звена,
 - угловая скорость кривошипа,
- угловая скорость кривошипа, 



Для
построения вектора скорости точки А определяем масштабный коэффициент
 (2.3)
(2.3)
где,  - скорость точки А,
- скорость точки А,
 - вектор скорости точки А,
- вектор скорости точки А,
 - полюс, выбираемый произвольно
- полюс, выбираемый произвольно

Для
определения скорости точки B запишем систему уравнений:
 (2.4)
(2.4)

 - из задания
- из задания
Для
определения скорости центра масс 2-го звена S2 воспользуемся
соотношением:
 (2.5)
(2.5)
где,  ,
,  -
расстояния между соответствующими точками на механизме, м
-
расстояния между соответствующими точками на механизме, м
 ,
,  -
длинны векторов скоростей на плане, мм
-
длинны векторов скоростей на плане, мм
 мм
мм
Соединив,
точку  и π получим скорость центра масс
второго звена.
и π получим скорость центра масс
второго звена.

Для
определения скорости точки C запишем систему уравнениё:
 (2.6)
(2.6)

 - из задания
- из задания
Для
определения скорости центра масс 4-го звена S4 воспользуемся
соотношением:
 (2.7)
(2.7)
где,  , -
расстояния между соответствующими точками на механизме, м
, -
расстояния между соответствующими точками на механизме, м
 ,
,  -
длинны векторов скоростей на плане, мм
-
длинны векторов скоростей на плане, мм
 мм
мм
Соединив,
точку и π получим скорость центра масс
второго звена.

Определим
значения угловых скоростей звеньев.


Направление  определяем, перенеся вектор ab в точку S2 – второе звено вращается
против часовой стрелки. Аналогично получим, что
определяем, перенеся вектор ab в точку S2 – второе звено вращается
против часовой стрелки. Аналогично получим, что  направлена
по часовой стрелке.
направлена
по часовой стрелке.
Скорости
точек остальных положений определяются аналогичным образом. Все значения сводим
в таблицу(2.1).
Таблица 2.1 –
Значения линейных и угловых скоростей
|
N
положения
|
VB=VS3,

|
VS2,
|
VС=VS5,
|
VS4,
|
VBA= VCA,
|
=,

|
|
1
|
0
|
5,58
|
0
|
5,58
|
8,37
|
33,48
|
|
2
|
5,36
|
6,66
|
3,01
|
6,14
|
7,34
|
29,37
|
|
3
|
8,46
|
8,14
|
6,04
|
7,39
|
4,36
|
17,42
|
|
4
|
8,37
|
8,37
|
8,37
|
8,37
|
0
|
0
|
|
5
|
6,04
|
7,39
|
8,46
|
8,14
|
4,36
|
17,42
|
|
6
|
3,01
|
6,14
|
5,36
|
6,66
|
7,34
|
29,37
|
|
7
|
0
|
5,58
|
0
|
5,58
|
8,37
|
33,48
|
|
8
|
3,01
|
6,14
|
5,36
|
6,66
|
7,34
|
29,37
|
|
9
|
6,04
|
7,39
|
8,46
|
8,14
|
4,36
|
17,42
|
|
10
|
8,37
|
8,37
|
8,37
|
8,37
|
0
|
0
|
|
11
|
8,46
|
8,14
|
6,04
|
7,39
|
4,36
|
17,42
|
|
12
|
5,36
|
6,66
|
3,01
|
6,14
|
7,34
|
29,37
|
Приведённый
момент инерции определяется по формуле:
 (2.8)
(2.8)
где,  - масса i-го звена рычажного
механизма, кг
- масса i-го звена рычажного
механизма, кг
 - линейная скорость центра масс i-го звена,
- линейная скорость центра масс i-го звена,
 - угловая скорость i-го звена,
- угловая скорость i-го звена,
 - приведённый момент инерции i-го звена по отношению к
центру масс
- приведённый момент инерции i-го звена по отношению к
центру масс
 (2.9)
(2.9)
 - для звена, совершающего сложное
движение
- для звена, совершающего сложное
движение
 - для звена, совершающего вращательное
или колебательное движения
- для звена, совершающего вращательное
или колебательное движения
 - для звена, совершающего
поступательное движение
- для звена, совершающего
поступательное движение
Запишем
формулу для нашего механизма:
 (2.10)
(2.10)
Для 5-го
положения приведём расчёт, а для остальных положений сведём значение в таблицу 2.2
в таблицу 2.2
 кг∙м2
кг∙м2
 кг∙м2
кг∙м2
 кг∙м2
кг∙м2
Записав
формулу (2.11) для положения №5 и подставив известные величины, получим:

Таблица 2.2 –
Приведённые моменты инерции
|
N положения
|
 ,
кг∙м2 ,
кг∙м2
|
N положения
|
,
кг∙м2
|
|
1
|
0,0592
|
7
|
0,0592
|
|
2
|
0,0886
|
8
|
0,0886
|
|
3
|
0,1441
|
9
|
0,1441
|
|
4
|
0,1701
|
10
|
0,1701
|
|
5
|
0,1441
|
11
|
0,1441
|
|
6
|
0,0886
|
12
|
0,0886
|
Для
построения графика приведённого момента инерции необходимо Рассчитать
масштабные коэффициенты.
 ,
,  (2.11)
(2.11)
где,  - масштабный коэффициент по оси
- масштабный коэффициент по оси 
 - максимальное значение , кг∙м2
- максимальное значение , кг∙м2
 - значение на
графике, мм
- значение на
графике, мм
 ,
, (2.12)
(2.12)
где,  - масштабный коэффициент по оси φ
- масштабный коэффициент по оси φ
 - принятая длинна одного оборота по оси
φ
- принятая длинна одного оборота по оси
φ
Определим
максимальную силу , которая действует на ползун
В по следующей формуле:
, которая действует на ползун
В по следующей формуле:
 (2.13)
(2.13)
где,  - Максимальное индикаторное давление,
- Максимальное индикаторное давление, 
 - диаметр поршня,
- диаметр поршня,


Определим
расстояние от оси  до графика по формуле (2.14)
до графика по формуле (2.14)

На планах
скоростей прикладываем все силы, действующие на механизм, и указываем их плечи.
Составляем сумму моментов относительно полюса и решаем уравнение.
Для 1-го
положения:

 (2.14)
(2.14)
где,  плечи соответствующих сил, снятые с
плана скоростей, мм.
плечи соответствующих сил, снятые с
плана скоростей, мм.
 H,
H,
 , во всех положениях
, во всех положениях
 H
H
Находим
момент привидения:
 (2.15)
(2.15)
где,  - приведённая сила, Н
- приведённая сила, Н
 - длина соответствующего звена, м
- длина соответствующего звена, м
 Н∙м
Н∙м
Для 2-го
положения:

 H
H
 Н∙м
Н∙м
Для 3-го
положения:
 H
H
 Н∙м
Н∙м
Для 4-го
положения:

 H
H
 Н∙м
Н∙м
Для 5-го
положения:

 H
H
 Н∙м
Н∙м
Для 6-го
положения:
 H
H
 Н∙м
Н∙м
Для 7-го
положения:

 H
H
 Н∙м
Н∙м
Для 8-го
положения:
 H
H
 Н∙м
Н∙м
Для 9-го
положения:
 H
H
 Н∙м
Н∙м
Для 10-го
положения:

 H
H
Н∙м
Для 11-го
положения:
 H
H
 Н∙м
Н∙м
Для 12-го
положения:
 H
H
 Н∙м
Н∙м
Таблица 2.4 –
Приведённые моменты сопротивления
|
N положения
|
 , ,

|
N положения
|
,
|
|
1
|
8,88
|
7
|
8,88
|
|
2
|
650,08
|
8
|
634,72
|
|
3
|
180,7
|
9
|
171,81
|
|
4
|
681,01
|
10
|
681,01
|
|
5
|
1665,43
|
11
|
1674,32
|
|
6
|
1242,3
|
12
|
1257,69
|
Определяем
масштабный коэффициент построения графика моментов сопротивления:
 ,
,  (2.16)
(2.16)
где,  - масштабный коэффициент по оси
- масштабный коэффициент по оси 
 - максимальное значение ,
- максимальное значение ,
 - значение на
графике, мм
- значение на
графике, мм
По данным
расчёта строится график .
Путём
графического интегрирования графика приведённого момента строится график работ
сил сопротивления  .
.
График работ
движущих сил  получаем в виде прямой, соединяющей
начало и конец графика работ сил сопротивления.
получаем в виде прямой, соединяющей
начало и конец графика работ сил сопротивления.
Масштабный
коэффициент графика работ:
 ,
, (2.17)
(2.17)
где, Н –
полюсное расстояние для графического интегрирования, мм
Н=60мм

Момент
движущий  является величиной постоянной и
определяется графически.
является величиной постоянной и
определяется графически.

Путём
вычитания ординат графика из соответствующих
ординат строится график изменения кинетической
энергии  .
.
 (2.18)
(2.18)

По методу Ф.
Витенбауэра на основании ранее построенных графиков и строим диаграмму энергия-масса  .
.
Определяем
углы  и
и  под
которыми к диаграмме энергия-масса, проводятся касательные.
под
которыми к диаграмме энергия-масса, проводятся касательные.
 (2.19)
(2.19)
 (2.20)
(2.20)
где,  - коэффициент неравномерности вращения
кривошипа.
- коэффициент неравномерности вращения
кривошипа.





Из чертежа
определим

Определяем
момент инерции маховика
 ,
, (2.21)
(2.21)
Маховик
устанавливается на валу звена приведения.
Определим
основные параметры маховика.
 ,кг (2,22)
,кг (2,22)
где,  - масса маховика, кг
- масса маховика, кг
 - плотность материала,
- плотность материала,  (материал-Сталь 45)
(материал-Сталь 45)
 - ширина маховика, м
- ширина маховика, м
 - диаметр маховика, м
- диаметр маховика, м
 ,м (2,23)
,м (2,23)
где,  - коэффициент (0,1÷0,3),
- коэффициент (0,1÷0,3), 
 м
м
 м
м
 кг
кг
3.
Силовой анализ рычажного механизма
3.1 Построение плана скоростей для расчётного
положения
Расчётным
положением является положение №11. Построение плана скоростей описано в разделе
№2. Масштабный коэффициент плана скоростей
3.2 Определение ускорений
Определяем
угловое ускорение звена 1.
 , (3.1)
, (3.1)
где, - момент от сил движущих,
 - момент от сил сопротивления,
- момент от сил сопротивления,
 - приведённый момент инерции маховика,
- приведённый момент инерции маховика,
- приведённый момент инерции рычажного
механизма для расчётного положения,
 - первая производная от приведённого
момента инерции механизма для расчётного положения
- первая производная от приведённого
момента инерции механизма для расчётного положения
 , (3.2)
, (3.2)
где, - масштабный коэффициент по оси ,
- масштабный коэффициент по оси φ,
 - угол между касательной, проведённой к
кривой графика в расчётном положении и осью φ.
- угол между касательной, проведённой к
кривой графика в расчётном положении и осью φ.



Знак минуса
говорит о том, что кривошип ОА замедляется. Направляем  против
направления и берём значение ускорения по модулю.
против
направления и берём значение ускорения по модулю.
Строим план
ускорений для расчётного положения.
Скорость
точки А определяем по формуле
 , (3.3)
, (3.3)
где,  - ускорение точки А,
- ускорение точки А, 
 - нормальное ускорение точки А
относительно точки О,
- нормальное ускорение точки А
относительно точки О,
 - тангенциальное (касательное)
ускорение точки А,
- тангенциальное (касательное)
ускорение точки А,
Ускорение  найдём по формуле:
найдём по формуле:
 , (3.4)
, (3.4)
где,  - угловая скорость кривошипа,
- угловая скорость кривошипа, 
- длина звена ОА, м

Ускорение  найдём по формуле:
найдём по формуле:
 , (3.5)
, (3.5)

Из
произвольно выбранного полюса  откладываем вектор
откладываем вектор  длиной 100 мм. Найдём масштабный
коэффициент плана скоростей.
длиной 100 мм. Найдём масштабный
коэффициент плана скоростей.
 , (3.6)
, (3.6)

Определим
длину вектора  :
:
Ускорение
точки А определим из следующеё формулы:

Определим
ускорение точки B из следующей системы уравнений:
 , (3.7)
, (3.7)
Для
определения нормальных ускорений точки В относительно точек А и С
Воспользуемся
следующими формулами:

Определим
длину векторов  :
:
Ускорение направляющей
 равно нулю, т.к. она неподвижна.
равно нулю, т.к. она неподвижна.
Кореолисово
ускорение точки В относительно направляющейрано
нулю, т.к. точка В движется только поступательно относительно .
Ускорение
точки В найдём, решив системе (3.7) векторным способом:
Из вершины
вектора ускорения точки А ( ) откладываем вектор
) откладываем вектор  (параллелен звену АВ и направлен от В к
А), из вершины вектора
(параллелен звену АВ и направлен от В к
А), из вершины вектора
проводим
прямую перпендикулярную звену АВ (линия действия  ); из
полюса проводим горизонтальную прямую (линия
действия
); из
полюса проводим горизонтальную прямую (линия
действия  ); на пересечении линий действия
векторов
); на пересечении линий действия
векторов  и получим
точку b,
соединив полученную точку с полюсом, получим вектор ускорения точки В.
и получим
точку b,
соединив полученную точку с полюсом, получим вектор ускорения точки В.
Из плана
ускорений определяем вектор ускорения точки В и вектор тангенциального
ускорения  :
:


Ускорение
сочки С определяем аналогично ускорению точки B.

Определим
длину векторов  :
:


Из полученных
тангенциальных ускорений найдём угловые ускорения 2-го и 3-го звеньев:
Определим
ускорения центров масс звеньев:
Ускорение
центра масс 2-го звена  найдём из соотношения (3.10)
найдём из соотношения (3.10)
 (3.8)
(3.8)
Из плана
ускорений  мм
мм
 мм
мм
 мм
мм

Ускорение
центра масс 4-го звена  найдём из соотношения (3.11)
найдём из соотношения (3.11)
 (3.9)
(3.9)
Из плана
ускорений  мм
мм
 мм
мм
 мм
мм

Ускорения
центров масс 3-го и 5-го звеньев равны ускорениям точек D и D’ соответственно:

Значения всех
ускорений сведём в таблицу:
Таблица 3.1 –
Ускорения звеньев
|
Ускорение
точек механизма
|
Значение,
|
Ускорение
центров масс и угловые
ускорения
|
значение, ,
|
|

|

|

|

|
|

|

|

|

|
|

|

|

|

|
|

|

|

|

|
|

|

|
|

|
|

|
|

|

|
|

|
|

|
|
|

|
|
---
|
---
|
|

|
|
---
|
---
|
3.3 Определение сил и моментов инерции звеньев
Силы инерции
определяем по формуле:
 (3.10)
(3.10)
где. - масса i-го звена, кг;
 - ускорение центра масс i-го звена,
- ускорение центра масс i-го звена,




Определяем
моменты инерции звеньев:
 (3.11)
(3.11)
где,  - момент инерции i-го звена,
- момент инерции i-го звена, 
 - момент инерции i-го звена относительно
центра масс,
- момент инерции i-го звена относительно
центра масс, 
 - угловая скорость i-го звена,
- угловая скорость i-го звена, 



Рассчитаем
силу тяжести каждого звена:





3.4 Определение реакций в кинематических парах и
уравновешивающей силы методом планов
Рассмотрим
группу Асура 2-3:
Найдём
тангенциальную реакцию из следующего уравнения:
 (3.12)
(3.12)
Из уравнения
(3.12) получим

С помощью
плана сил определим неизвестные реакции  и
и  :
:

Найдём
масштабный коэффициент

Из плана сил
определяем значения неизвестных сил:


Реакцию  определяем из следующего векторного
уравнения
определяем из следующего векторного
уравнения


 найдём из векторного уравнения
найдём из векторного уравнения
 , отсюда
, отсюда 
Таблица 3.3 –
Силы и вектора сил 2-го и 3-го звеньев
|

|

|

|

|

|

|

|

|

|
|

|
9196,598
|
2149,35
|
9444,472
|
6572,285
|
83,3
|
384,65
|
47,04
|
2981,904
|
1370,979
|
|

|
279,86
|
65,4
|
287,4
|
200
|
2,53
|
11,7
|
1,43
|
90,74
|
41,72
|
Рассмотрим
группу Асура 4-5:
Найдём
тангенциальную реакцию из следующего уравнения:
 (3.13)
(3.13)
Из уравнения
(3.13) получим

С помощью
плана сил определим неизвестные реакции  и
и  :
:

Найдём
масштабный коэффициент
Из плана сил
определяем значения неизвестных сил:


Реакцию определяем из следующего векторного
уравнения


 найдём из векторного уравнения
найдём из векторного уравнения
 , отсюда
, отсюда 
Таблица 3.3 –
Силы и вектора сил 2-го и 3-го звеньев.
|

|

|

|

|

|

|

|

|

|
|
|
13499,197
|
3550,439
|
13958,357
|
7378,425
|
83,3
|
24183,7
|
47,04
|
4432,944
|
3459,338
|
|
|
365,91
|
96,24
|
378,356
|
200
|
2,25
|
655,524
|
1,27
|
120,159
|
93,769
|
Рассмотрим
начальный механизм.
Определим
уравновешивающую силу 


Уравновешивающий
момент равен

Реакцию  определяем графически
определяем графически

Из плана сил
находим

Для этого к
повёрнутому на  плану скоростей в
соответствующих точках прикладываем все внешние силы действующие на механизм,
не изменяя их направления. Моменты раскладываем на пару сил, изменив их направления.
плану скоростей в
соответствующих точках прикладываем все внешние силы действующие на механизм,
не изменяя их направления. Моменты раскладываем на пару сил, изменив их направления.
 , (3.14)
, (3.14)
где,  и
и  -
пара сил,
-
пара сил,
- момент инерции i-го звена,
 - длина i-го звена,
- длина i-го звена,


Записываем
уравнение моментов сил относительно полюса :
 , отсюда
, отсюда

Уравновешивающий
момент равен

3.6 Расчёт погрешности 2-х методов
 , (3.15)
, (3.15)
где,  - сила полученная методом Жуковского,
- сила полученная методом Жуковского,
 - сила полученная методом планов,
- сила полученная методом планов,
 - погрешность,
- погрешность, 

4.1 подбор числа зубьев и числа сателлитов
планетарного редуктора
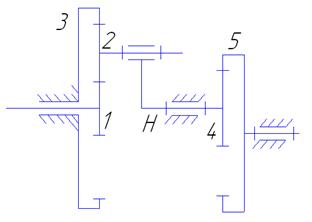
Рисунок 4.1
Определим неизвестное
число зубьев 3-го колеса из условия соосности:
 (4.1)
(4.1)
где,  - число зубьев 1-го колеса
- число зубьев 1-го колеса
 - число зубьев 2-го колеса
- число зубьев 2-го колеса

Определим
передаточное отношение 
 (4.2)
(4.2)
где,  - передаточное отношение от 1-го звена
к водилу, при неподвижном третьем звене
- передаточное отношение от 1-го звена
к водилу, при неподвижном третьем звене
 (4.3)
(4.3)
где,  - число зубьев 4-го колеса
- число зубьев 4-го колеса
 - число зубьев 5-го колеса
- число зубьев 5-го колеса

 (4.4)
(4.4)
где,  - передаточное число от 1-го ко 3-му
колесу при неподвижном водиле
- передаточное число от 1-го ко 3-му
колесу при неподвижном водиле
 (4.5)
(4.5)
где,  - передаточное число от 1-го ко 2-му
колесу
- передаточное число от 1-го ко 2-му
колесу
 - передаточное число от 2-го ко 3-му
колесу
- передаточное число от 2-го ко 3-му
колесу


Проверяем
условие соседства:
 (4.6)
(4.6)
где,  - число сателлитов планетарного
механизма
- число сателлитов планетарного
механизма
Из формулы
(4.4) выразим K
Примем 
 - условие соседства выполняется
- условие соседства выполняется
Проверяем
условие сборки
 (4.7)
(4.7)
где,  - сумма чисел зубьев в одной из
ступеней механизма
- сумма чисел зубьев в одной из
ступеней механизма
 - целое число
- целое число
 - условие сборки выполняется
- условие сборки выполняется
4.2 Исследование планетарного механизма
графическим и аналитическим способом
Рассчитаем
радиусы колёс
 (4.8)
(4.8)
где,  - радиус колеса,
- радиус колеса,
 - модуль
- модуль

Изображаем
механизм в выбранном масштабе
 (4.9)
(4.9)
Определим
радиусы колёс на схеме
Строим план
линейных скоростей. Для построения прямой распределения скоростей точек звена
необходимо знать скорости двух точек. Для 1-го звена это точки А и О. Скорость
точки О равна нулю, так как ось неподвижна. Скорость точки А определим по
формуле
 (4.10)
(4.10)
где, - угловая скорость 1-го звена,
Угловую
скорость 1-го звена определим по формуле
 (4.11)
(4.11)
где,  - частота вращения двигателя,
- частота вращения двигателя, 

Определим угловую
скорость вращения водила и второго зубчатого колеса

Вектор
скорости точки А изображаем в виде отрезка Aa. Принимаем  .
.
Определим
масштабный коэффициент
 (4.12)
(4.12)
где,  - масштабный коэффициент скорости,
- масштабный коэффициент скорости,

Прямая Оа
является линией распределения скоростей точек 1-го звена.
Скорость
точки В равна нулю, так как колесо 3 неподвижно.
Прямая Оb является линией
распределения скоростей тачек водила.
Строим план
угловых скоростей.
Из
произвольно выбранной точки Р строим пучок лучей, параллельных прямым Оа, Оb и Eb. При пересечении этих
прямых с горизонтальной осью расположенной от точки Р на произвольном
расстоянии РS,
получим отрезки S1, S5 и SH, которые являются аналогами угловых скоростей.
Найдём
передаточное отношение
 (4.13)
(4.13)
Рассчитаем
погрешность двух методов
 (4.14)
(4.14)
где,  - передаточное отношение, заданное в
условии
- передаточное отношение, заданное в
условии
 - передаточное отношение найденное с
помощью плана угловых скоростей
- передаточное отношение найденное с
помощью плана угловых скоростей

4.3 Расчёт параметров зубчатых колёс
Рассчитываем
смещение колёс
Так как  , то
, то 
Так как  , то
, то 
Коэффициент
суммы смещений
 (4.15)
(4.15)
где,  - смещение 1-го колеса
- смещение 1-го колеса
 - смещение 2-го колеса
- смещение 2-го колеса

Определим
угол зацепления по формуле
 (4.16)
(4.16)
где,  ,
,  -
эвольвентная функция углов и
-
эвольвентная функция углов и 


Межосевое
расстояние определим по формуле
 (4.17)
(4.17)
где, - модуль зубчатой передачи

Определим
делительные диаметры
 (4.18)
(4.18)


Делительное
межосевое расстояние
 (4.19)
(4.19)

Коэффициент
воспринимаемости смещения
 (4.20)
(4.20)
где,  - межосевое расстояние,
- межосевое расстояние,
 - делительное межосевое расстояние,
- делительное межосевое расстояние,
Коэффициент
уравнительного смещения
 (4.21)
(4.21)

Определим
радиусы начальных окружностей
 (4.22)
(4.22)

Радиусы
вершин зубьев
 (4.23)
(4.23)
где,  - коэффициент высоты головки зуба
- коэффициент высоты головки зуба


Радиусы
впадин зубьев
 (4.24)
(4.24)
где,  - коэффициент радиального зазора
- коэффициент радиального зазора


Высота зуба
 (4.25)
(4.25)


Толщины
зубьев по делительной окружности
 (4.26)
(4.26)


Радиусы
основных окружностей
 (4.27)
(4.27)


Углы профиля
в точке на окружности вершин
 (4.28)
(4.28)


Толщины
зубьев по окружности вершин
 (4.29)
(4.29)


Проверим
зубья на заострение
 (4.30)
(4.30)
 Зубья удовлетворяют условию заострения
Зубья удовлетворяют условию заострения
Угловой шаг
зубьев
 (4.31)
(4.31)
Для 1-го
колеса:
 (4.32)
(4.32)
где,  - коэффициент относительного скольжения
1-го зубчатого колеса
- коэффициент относительного скольжения
1-го зубчатого колеса
 - передаточное отношение от второго
колеса к первому
- передаточное отношение от второго
колеса к первому
 - длина теоретической линии зацепления
- длина теоретической линии зацепления
 - переменное расстояние от точки
- переменное расстояние от точки  к точке
к точке 
 и
и 
Для 2-го
колеса:
 (4.33)
(4.33)
Определим
масштабный коэффициент относительного скольжения
Результаты
сводим в таблицу
Таблица 4.1 –
Коэффициенты скольжения
|
,
|
|
 , ,
|

|
 , ,
|
|
0
|

|
|
1
|
25
|
|
20
|
-8,2605
|
-206,51
|
0,892014
|
22,3
|
|
40
|
-3,13025
|
-78,26
|
0,757884
|
18,95
|
|
60
|
-1,42017
|
-35,50
|
0,586805
|
14,67
|
|
80
|
-0,56513
|
-14,13
|
0,361073
|
9,03
|
|
100
|
-0,0521
|
-1,3
|
0,04952
|
1,24
|
|
120
|
0,289917
|
7,25
|
-0,40829
|
-10,21
|
|
140
|
0,534214
|
13,36
|
-1,14691
|
-28,67
|
|
160
|
0,717438
|
17,94
|
-2,53904
|
-63,48
|
|
180
|
0,859944
|
21,5
|
-6,14002
|
-153,5
|
|
200
|
0,97395
|
24,35
|
-37,3877
|
-934,69
|
|
224,28
|
1
|
25
|
|
|
4.5 Определение коэффициента перекрытия зубчатой
передачи графическим и аналитическим способом
Коэффициент
перекрытия зубчатой передачи определяем (графически) по формуле
 (4.34)
(4.34)
где, - длина активной линии зацепления
 - основной шаг,
- основной шаг,
Для
определения коэффициента перекрытия зубчатой передачи аналитически
воспользуемся формулой
 (4.35)
(4.35)
где,  - углы профиля в точке на окружности
при вершине
- углы профиля в точке на окружности
при вершине
- угол зацепления

5.1 Вычисление масштабных коэффициентов диаграмм
движения толкателя
После
построения и графического интегрирования заданного графика аналога ускорения
толкателя мы получили диаграмму аналога скорости толкателя, которую также
графически интегрируем, в результате также получаем диаграмму аналога пути
толкателя.
Исходя из
диаграммы пути, определяем масштабные коэффициенты на фазе удаления и фазе
возврата. Воспользуемся для этого формулой
 (5.1)
(5.1)
где,  - масштабный коэффициент для графика
пути,
- масштабный коэффициент для графика
пути, 
 - ход толкателя,
- ход толкателя,
 - максимальное значение пути,
- максимальное значение пути,
Для фазы
удаления
Для фазы
возврата
Определим
масштабный коэффициент по углу
 (5.2)
(5.2)
где,  - рабочая фаза,
- рабочая фаза, 
 - расстояние между 1-й и 18-й точками
на чертеже.
- расстояние между 1-й и 18-й точками
на чертеже.

Определим
масштабные коэффициенты для диаграммы скорости
 (5.3)
(5.3)
где,  - масштабный коэффициент скорости,
- масштабный коэффициент скорости, 
 - полюсное расстояние на диаграмме
скорости,
- полюсное расстояние на диаграмме
скорости,
Для фазы
удаления

Для фазы
возврата

Определим
масштабные коэффициенты для аналога ускорения
 (5.4)
(5.4)
где,  - масштабный коэффициент ускорения,
- масштабный коэффициент ускорения,
 - полюсное расстояние на диаграмме
ускорения,
- полюсное расстояние на диаграмме
ускорения,
Для фазы
удаления

Для фазы
возврата

5.2 Определение минимального радиуса кулачка
Для его
нахождения исходными данными являются график пути и график скоростей  и
и  , ход
толкателя , угол давления
, ход
толкателя , угол давления  ,
эксцентриситет
,
эксцентриситет 
На основании
этих данных строится зависимость  .
.
По оси откладываются расстояния пути, которые
берутся с графика пути в определённом масштабе, т.к. у нас разные масштабы на
фазе удаления и фазе возврата, то мы должны привести их к одному.
Найдём
поправочные коэффициенты
 (5.5)
(5.5)
где,  - поправочный коэффициент
- поправочный коэффициент
 - новый масштабный коэффициент,
одинаковый для оси и
- новый масштабный коэффициент,
одинаковый для оси и  , он
принимается произвольно.
, он
принимается произвольно.
Через
полученные точки на линии параллельной откладываем
отрезки аналогов скоростей для соответствующего интервала, взятые с графика
скорости.
Отрезок
скорости приводится к тому же масштабу, что и графики пути.
Определим
поправочные коэффициенты
 (5.6)
(5.6)
где,  - поправочный коэффициент
- поправочный коэффициент
После
построения получили некоторую кривую, к ней под углом  проводим
касательные.
проводим
касательные.
Из области
выбора центра  выбираем с учётом масштаба
выбираем с учётом масштаба
 .
.
5.3 Определение углов давления
Найдём
зависимость угла давления  от угла.
от угла.
 (5.7)
(5.7)
где, - угол давления, 
- расстояние  ,
,
- длина коромысла АВ,
- отрезок скорости,
 - угол между отрезком АВ и расчётной
прямой на чертеже,
- угол между отрезком АВ и расчётной
прямой на чертеже,
Произведём
расчёт при 


Остальные
значения угла давления определяем аналогично, и результаты сносим в таблицу
Таблица 5.1 –
Углы давления
|

|
0
|
14,37
|
27,75
|
43,12
|
57,5
|
71,87
|
86,25
|
100,62
|
115
|
|

|
-13,56
|
13,91
|
30,29
|
35,8
|
35,27
|
32,23
|
26,84
|
19,45
|
10,04
|
|
|
135
|
152,5
|
170
|
187,5
|
205
|
222,5
|
240
|
257,5
|
275
|
|
|
10,04
|
-0,31
|
-10,52
|
-19,58
|
-27,28
|
-34,7
|
-36,88
|
-30,67
|
-13,56
|
При
построении используем следующие масштабные коэффициенты

Определим
полярные координаты для построения центрового профиля кулачка.
 (5.8)
(5.8)
где,  - радиус вектор,
- радиус вектор,
 - отрезок пути,
- отрезок пути,
 (5.9)
(5.9)

 (5.10)
(5.10)
Рассчитываем и  для
положения 5
для
положения 5


 Все остальные значения сводим в таблицу
Все остальные значения сводим в таблицу
|
Полож
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
|

|
0
|
14,37
|
28,75
|
43,12
|
57,5
|
71,87
|
86,25
|
100,62
|
115
|
|

|
20
|
21,24
|
24,7
|
29,89
|
36
|
42,11
|
47,3
|
50,76
|
52
|
|
Полож
|
10
|
11
|
12
|
13
|
14
|
15
|
16
|
17
|
18
|
|
|
135
|
152,5
|
170
|
187,5
|
205
|
222,5
|
240
|
257,5
|
275
|
|
|
52
|
50,58
|
46,96
|
41,85
|
36
|
29,53
|
25,04
|
21,42
|
20
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определим
масштабный коэффициент для построения кулачка
По полученным
значениям и строим
центровой профиль кулачка. Для этого в масштабе проводим
окружность радиусом  .
.
От радиуса в направлении противоположном вращению
кулачка, отложим полярные углы , на сторонах которых
отложим . Соединив плавной кривой концы
радиусов-векторов получим центровой профиль кулачка.
Действительный
профиль кулачка найдём, как кривую, отстоящую от центрового профиля на
расстоянии, равном радиусу ролика.
Определим
радиус ролика
 (5.11)
(5.11)
где,  - радиус ролика,
- радиус ролика,
 (5.12)
(5.12)
где, - радиус кривизны профиля кулачка,
определяется графически
Радиус
кривизны профиля кулачка приближённо определяется как радиус вписанной
окружности участка кулачка, где его кривизна кажется наибольшей. На этом
участке произвольно выбираются точки  . Точку соединим с точками
. Точку соединим с точками  и
и  . К
серединам получившихся хорд восстановим перпендикуляры, точку пересечения
которых примем за центр вписанной окружности.
. К
серединам получившихся хорд восстановим перпендикуляры, точку пересечения
которых примем за центр вписанной окружности.

Принимаем 
На центровом
профиле кулачка выбираем ряд точек, через которые проводим окружность с
радиусом ролика. Огибающая эти окружности является действительным профилем
кулачка.
Литература
1. Артоболевский И.И. Теория механизмов и машин;
Учеб. для втузов. – 4-е изд., перераб. и доп. – М.: Наука. 1988;
2. Девойно Г.Н. Курсовое проектирование по
теории механизмов и машин. 1986.