Теория администрации Анри Файоля; школа поведенческих наук
Федеральное
Агентство образования Российской Федерации
Пензенский
государственный университет
Кафедра
"Информационная безопасность систем и технологий"
РЕФЕРАТ
по
теме:
«Контроллер прямого доступа к памяти»
Выполнил: Качайкин Е.И.
Руководитель работы:
Иванов А.П.
Пенза 2006
Содержание
Организация прямого
доступа к памяти
Контроллер прямого
доступа к памяти КР580ИК57 (КР580ВТ57)
Последовательность
программирования контроллера
Пример программирования
Организация
прямого доступа к памяти
Одним из
способов обмена данными с ВУ является обмен в режиме прямого доступа к памяти
(ПДП). В этом режиме обмен данными между ВУ и основной памятью микроЭВМ
происходит без участия процессора. Обменом в режиме ПДП управляет не программа,
выполняемая процессором, а электронные схемы, внешние по отношению к
процессору. Обычно схемы, управляющие обменом в режиме ПДП, размещаются в
специальном контроллере, который называется контроллером прямого доступа к
памяти.
Обмен данными
в режиме ПДП позволяет использовать в микроЭВМ быстродействующие внешние
запоминающие устройства, такие, например, как накопители на жестких магнитных
дисках, поскольку ПДП может обеспечить время обмена одним байтом данных между
памятью и ВЗУ, равное циклу обращения к памяти.
Для
реализации режима прямого доступа к памяти необходимо обеспечить
непосредственную связь контроллера ПДП и памяти микроЭВМ. Для этой цели можно
было бы использовать специально выделенные шины адреса и данных, связывающие
контроллер ПДП с основной памятью. Но такое решение нельзя признать
оптимальным, так как это приведет к значительному усложнению микроЭВМ в целом,
особенно при подключении нескольких ВЗУ. В целях сокращения количества линий в
шинах микроЭВМ контроллер ПДП подключается к памяти посредством шин адреса и
данных системного интерфейса. При этом возникает проблема совместного использования
шин системного интерфейса процессором и контроллером ПДП. Можно выделить два
основных способа ее решения: реализация обмена в режиме ПДП с "захватом
цикла" и в режиме ПДП с блокировкой процессора.
Существуют
две разновидности прямого доступа к памяти с "захватом цикла".
Наиболее простой способ организации ПДП состоит в том, что для обмена
используются те машинные циклы процессора, в которых он не обменивается данными
с памятью. В такие циклы контроллер ПДП может обмениваться данными с памятью,
не мешая работе процессора. Однако возникает необходимость выделения таких
циклов, чтобы не произошло временного перекрытия обмена ПДП с операциями
обмена, инициируемыми процессором. В некоторых процессорах формируется
специальный управляющий сигнал, указывающий циклы, в которых процессор не
обращается к системному интерфейсу. При использовании других процессоров для
выделения таких циклов необходимо применение в контроллерах ПДП специальных
селектирующих схем, что усложняет их конструкцию. Применение рассмотренного
способа организации ПДП не снижает производительности микроЭВМ, но при этом
обмен в режиме ПДП возможен только в случайные моменты времени одиночными
байтами или словами.
Более
распространенным является ПДП с "захватом цикла" и принудительным
отключением процессора от шин системного интерфейса. Для реализации такого
режима ПДП системный интерфейс микроЭВМ дополняется двумя линиями для передачи
управляющих сигналов "Требование прямого доступа к памяти" (ТПДП) и
"Предоставление прямого доступа к памяти" (ППДП).
Управляющий
сигнал ТПДП формируется контроллером прямого доступа к памяти. Процессор,
получив этот сигнал, приостанавливает выполнение очередной команды, не
дожидаясь ее завершения, выдает на системный интерфейс управляющий сигнал ППДП
и отключается от шин системного интерфейса. С этого момента все шины системного
интерфейса управляются контроллером ПДП. Контроллер ПДП, используя шины
системного интерфейса, осуществляет обмен одним байтом или словом данных с
памятью микроЭВМ и затем, сняв сигнал ТПДП, возвращает управление системным
интерфейсом процессору. Как только контроллер ПДП будет готов к обмену
следующим байтом, он вновь "захватывает" цикл процессора и т.д. В
промежутках между сигналами ТПДП процессор продолжает выполнять команды программы.
Тем самым выполнение программы замедляется, но в меньшей степени, чем при
обмене в режиме прерываний.
Применение в
микроЭВМ обмена данными с ВУ в режиме ПДП всегда требует предварительной
подготовки, а именно: для каждого ВУ необходимо выделить область памяти,
используемую при обмене, и указать ее размер, т.е. количество записываемых в
память или читаемых из памяти байт (слов) информации. Следовательно, контроллер
ПДП должен обязательно иметь в своем составе регистр адреса и счетчик байт
(слов). Перед началом обмена с ВУ в режиме ПДП процессор должен выполнить
программу загрузки. Эта программа обеспечивает запись в указанные регистры
контроллера ПДП начального адреса выделенной ВУ памяти и ее размера в байтах
или словах в зависимости от того, какими порциями информации ведется обмен.
Сказанное не относится к начальной загрузке программ в память в режиме ПДП. В
этом случае содержимое регистра адреса и счетчика байт слов устанавливается
переключателями или перемычками непосредственно на плате контроллера.
Блок-схема
простого контроллера ПДП, обеспечивающего ввод данных в память микроЭВМ по
инициативе ВУ в режиме ПДП "Захват цикла", приведена на рис. 1.

Рис. 1.
Контроллер ПДП для ввода данных из ВУ в режиме "Захват цикла" и
отключением процессора от шин системного интерфейса
Перед началом
очередного сеанса ввода данных из ВУ процессор загружает в регистры его
контроллера следующую информацию: в счетчик байт - количество принимаемых байт
данных, а в регистр адреса - начальный адрес области памяти для вводимых
данных. Тем самым контроллер подготавливается к выполнению операции ввода
данных из ВУ в память микроЭВМ в режиме ПДП.
Байты данных
из ВУ поступают в регистр данных контроллера в постоянном темпе. При этом
каждый байт сопровождается управляющим сигналом из ВУ "Ввод данных",
который обеспечивает запись байта данных в регистр данных контроллера. По этому
же сигналу и при ненулевом состоянии счетчика байт контроллер формирует сигнал
ТПДП. По ответному сигналу процессора ППДП контроллер выставляет на шины адреса
и данных системного интерфейса содержимое своих регистров адреса и данных
соответственно. Формируя управляющий сигнал "Вывод", контроллер ПДП
обеспечивает запись байта данных из своего регистра данных в память микроЭВМ.
Сигнал ППДП используется в контроллере и для модификации счетчика байт и
регистра адреса. По каждому сигналу ППДП из содержимого счетчика байт вычитается
единица, и как только содержимое счетчика станет равно нулю, контроллер
прекратит формирование сигналов "Требование прямого доступа к
памяти".
На примере
простого контроллера ПДП мы рассмотрели только процесс подготовки контроллера и
непосредственно передачу данных в режиме ПДП. На практике любой сеанс обмена
данными с ВУ в режиме ПДП всегда инициируется программой, выполняемой
процессором, и включает два следующих этапа.
1. На этапе
подготовки ВУ к очередному сеансу обмена процессор в режиме программно-управляемого
обмена опрашивает состояние ВУ (проверяет его готовность к обмену) и посылает в
ВУ команды, обеспечивающие подготовку ВУ к обмену. Такая подготовка может
сводиться, например, к перемещению головок на требуемую дорожку в накопителе на
жестком диске. Затем выполняется загрузка регистров контроллера ПДП. На этом
подготовка к обмену в режиме ПДП завершается и процессор переключается на
выполнение другой программы.
2. Обмен
данными в режиме ПДП начинается после завершения подготовительных операций в ВУ
по инициативе либо ВУ, как это было рассмотрено выше, либо процессора. В этом
случае контроллер ПДП необходимо дополнить регистром состояния и управления,
содержимое которого будет определять режим работы контроллера ПДП. Один из
разрядов этого регистра будет инициировать обмен данными с ВУ. Загрузка
информации в регистр состояния и управления контроллера ПДП производится
программным путем.
Наиболее
распространенным является обмен в режиме прямого доступ к памяти с блокировкой
процессора. Он отличается от ПДП с "захватом цикла" тем, что
управление системным интерфейсом передается контроллеру ПДП не на время обмена
одним байтом, а на время обмена блоком данных. Такой режим ПДП используется в
тех случаях, когда время обмена одним байтом с ВУ сопоставимо с циклом
системной шины.
В микроЭВМ
можно использовать несколько ВУ, работающих в режиме ПДП. Предоставление таким
ВУ шин системного интерфейса для обмена данными производится на приоритетной
основе. Приоритеты ВУ реализуются так же, как и при обмене, данными в режиме
прерывания, но вместо управляющих сигналов "Требование прерывания" и
"Предоставление прерывания" используются сигналы "Требование
прямого доступа" и "Предоставление прямого доступа",
соответственно.
Контроллер
прямого доступа к памяти КР580ИК57 (КР580ВТ57)
Обменом
данными в компьютере при классическом его построении заведует процессор. Однако
такую задачу, как обмен данными с периферийными устройствами (т. е. при
осуществлении связи с внешним миром), стараются по возможности выполнить при
помощи специализированных устройств обмена информацией. Это позволяет, с одной
стороны, освободить процессор (а заодно и программиста) от выполнения данной
задачи, с другой - произвести требуемый обмен данными с большей скоростью, чем
это мог бы сделать процессор. Ведь периферийные устройства способны работать со
скоростью, сравнимой с быстродействием процессора. К таким устройствам
относятся, к примеру, контроллер дисплея или накопители на гибком или жестком
магнитных дисках. Все они требуют наличия в системе так называемого контроллера
прямого доступа к памяти, позволяющего заменить процессор и организовать более
быстрый и прямой обмен данными между памятью и заданным периферийным
устройством.
В серии К580
выпускался контроллер алфавитно-цифрового дисплея КР580ИК57. Микросхема
представляет собой БИС четырехканального программируемого контроллера прямого
доступа к памяти (ПДП). Каждый из четырех каналов адресует область внешней
памяти путем инкрементирования выбранного адреса. ПДП имеет приоритетную логику,
реализующую запросы от четырех периферийных устройств и производит счет циклов
прямого доступа к памяти каждого канала.
Использование
БИС ПДП позволяет существенно сократить аппаратные затраты при реализации
прямого доступа к памяти.
На рис. 2
приведена структурная схема КР580ИК57, в табл. 1 - назначение выводов.
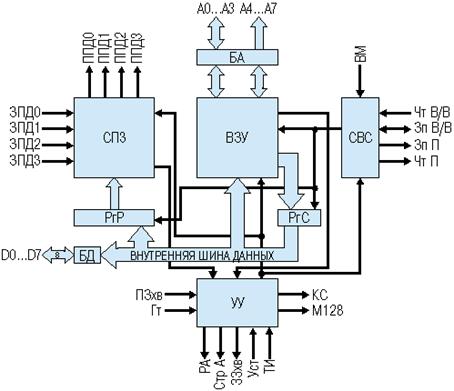
Рис. 2.
Структура микросхемы КР580ИК57
Таблица 1.
Назначение выводов
|
Номер
вывода
|
Обозначение
|
Тип
|
Описание
|
|
1
|
Чт В/В(I/O R
|
Вход/выход
|
Вход/выход Чтение
ввода-вывода. Сигнал Чт В/В разрешает (во входном режиме) чтение 8-разрядного
регистра состояния или записанных в ЗУ ПДП начального адреса и числа циклов
ПД любого из каналов, в выходном режиме сигнал Чт В/В разрешает выдачу
информации из внешнего устройства ввода-вывода
|
|
2
|
Зп В/В
(I/O W)
|
Вход/выход
|
Запись ввода-вывода.
Сигнал Зп В/В разрешает (во входном режиме) загрузку регистров установки
режимов, начального адреса значения количества циклов для любого канала ПДП. В
выходном режиме сигнал Зп В/В разрешает запись информации во внешнее
устройство ввода-вывода
|
|
3
|
Чт П
(MEMR)
|
Выход
|
Чтение памяти. Выходной
сигнал ЧтП предназначен для внешнего ЗУ
|
|
4
|
Зп П
(MEMW)
|
Выход
|
Запись в память.
Выходной сигнал ЗпП предназначен для внешнего ЗУ
|
|
5
|
М128
(MARK)
|
Выход
|
Модуль 128. Выходной
сигнал М128 появляется в каждом 128-м цикле от конца массива, а также во
время действия сигнала КС
|
Гт
(Ready)
|
Вход
|
Готовность. Входной
сигнал Гт предназначен для обеспечения совместной работы ПДП и медленных
внешних устройств. Сигнал может поступать асинхронно. Он отражает готовность
внешнего устройства к ведению обмена
|
|
7
|
ПЗхв
(HLDA)
|
Вход
|
Подтверждение захвата.
Входной сигнал ПЗхв является ответом МП на сигнал ЗЗхв. При появлении ПЗхв
системные шины (линии) свободны
|
|
8
|
СтрА
(ADSTB)
|
Выход
|
Строб адреса. Выходной
сигнал СтрА указывает, что на шине данных выдан старший байт адреса внешнего
ЗУ
|
|
9
|
РА
(AEN)
|
Выход
|
Разрешение адреса.
Выходной сигнал РА используется для блокировки адресных шин в невыбранных устройствах
|
|
10
|
ЗЗхв
(HRQ)
|
Выход
|
Запрос захвата.
Выходной сигнал ЗЗхв запрашивает у МП разрешение на управление системными
шинами (линиями)
|
|
11
|
ВМ
(CS)
|
Вход
|
Выбор микросхемы.
Входной сигнал ВМ позволяет активизировать данную БИС
|
|
12
|
ТИ
(CLK)
|
Вход
|
Тактовый импульс.
Входной сигнал ТИ обеспечивает функционирование микросхемы. Обычно этим
сигналом является сигнал Ф2 микропроцессора КР580ИК80А
|
|
13
|
Уст
(RESET)
|
Вход
|
Установка. Входной
сигнал Уст предназначен для установки схемы в исходное состояние
|
|
14
|
ППД2
(DACK2)
|
Выход
|
Подтверждение прямого
доступа. Выходные сигналы подтверждения прямого доступа ППД2, ППД3 являются
ответными по отношению к ЗПД2, ЗПД3. Они вырабатываются микросхемой в
соответствии с приоритетами внешних устройств
|
|
15
|
ППД3
(DACK3)
|
Выход
|
|
|
16
|
ЗПД3
(DRQ3)
|
Вход
|
Запрос прямого доступа.
Входные сигналы ЗПД0...ЗПД3 поступают асинхронно из внешних устройств и
воспринимаются микросхемой как запросы на обмен с ЗУ
|
|
17
|
ЗПД2 (DRQ2)
|
Вход
|
|
|
18
|
ЗПД1 (DRQ1)
|
Вход
|
|
|
19
|
ЗПД0 (DRQ0)
|
Вход
|
|
|
20
|
Общий (GND)
|
|
|
|
21
|
D7
|
Вход/выход
|
Шина данных
|
|
22
|
D6
|
D5
|
|
|
|
24
|
ППД1
(DACK1)
|
Выход
|
Подтверждение прямого
доступа. Выходные сигналы подтверждения прямого доступа ППД0, ППД1 являются
ответными по отношению к ЗПД0, ЗПД1. Они вырабатываются микросхемой в
соответствии с приоритетами внешних устройств
|
|
25
|
ППД0 (DACK0)
|
Выход
|
|
|
26
|
D4
|
Вход/выход
|
Шина данных
|
|
27
|
D3
|
|
|
|
28
|
D2
|
|
|
|
29
|
D1
|
|
|
|
30
|
D0
|
|
|
|
31
|
Пит (+U)
|
|
БИС ПДП имеет один
номинал напряжения питания +5 В
|
|
32
|
A0
|
Вход/выход
|
Шина адреса
|
|
33
|
A1
|
|
|
|
34
|
A2
|
|
|
|
35
|
A3
|
|
|
|
36
|
КС
(TC)
|
Выход
|
Конец счета. Выходной
сигнал КС вырабатывается при установке в нуль 14-разрядного регистра
количества циклов и указывает периферийным устройствам, что данный цикл ПД
последний
|
|
37
|
A4
|
Выход
|
Шина адреса
|
|
38
|
A5
|
|
|
|
39
|
A6
|
|
|
|
40
|
A7
|
|
|
Схема приема
запросов СПЗ предназначена для приема и привязки несинхронных сигналов запросов
на организацию прямого доступа к памяти от четырех устройств, а также выдачи
ответных сигналов подтверждения. Каждый из четырех каналов связан с БИС ПДП
отдельными линиями запросов и подтверждения прямого доступа. Выдача ответного
сигнала подтверждения для соответствующего канала происходит в зависимости от
его приоритета.
Внутреннее
запоминающее устройство микросхемы ВЗУ предназначено для хранения начального
адреса и числа циклов ПД для каждого канала в 16-разрядных регистрах адреса РгА
и циклов РгЦ соответственно. РгА загружается адресом первой ячейки памяти, к
которой должно быть обращение. Младшие 14 разрядов РгЦ указывают число циклов
ПД (минус один) до конца счета (до появления сигнала КС}. Разряды 14-й и 15-й
РгЦ указывают на вид обмена данными при ПД (табл. 2).
В блоке ВЗУ
происходит формирование массива адресов инкрементированием текущего адреса.
Младший байт адреса А7...А0 помещается в буфер адреса БА, старший байт
(А15...А8} - на буфер данных БД. Старший байт адреса должен быть защелкнут во
внешнем регистре по сигналу СтрА.
Буфер данных
БД представляет собой 8-разрядное устройство, обеспечивающее двунаправленный
обмен информацией между БИС и системной шиной данных. Информация, поступающая на
БД с системной шины данных, передается в регистр установки режимов либо в ЗУ. С
внутренней шины данных на ШД, поступает информация о регистрах адреса,
количества циклов, состояния БИС. В течение циклов ПД выдаются старшие восемь
разрядов адреса памяти.
Буфер адреса
БА предназначен для приема и выдачи адреса памяти либо одного из внутренних
регистров схемы. БА разделен на две части. Адресные линии А0...А3 в состоянии
программирования указывают номер регистра, инициализированного для обмена. При
обслуживании циклов ПД эти линии являются входными и по ним передаются четыре
младших разряда адреса памяти.
Адресные
линии А4...А7 - всегда выходные. Информация на них соответствует разрядам
генерируемого адреса памяти.
Последовательностью
операций в течение циклов ПД управляет устройство управления УУ.
Схема
выработки сигналов Запись-Чтение СВС осуществляет прием, формирование и выдачу
сигналов, обеспечивающих обмен информации между процессором и микросхемой - с
одной стороны, и памятью и периферийными устройствами - с другой.
Регистр
установки режимов РгР хранит информацию о режимах работы БИС, к которым
относятся "Автозагрузка", "Конец счета-стоп",
"Удлиненная запись", "Обычная запись", "Циклический
сдвиг приоритета" и "Фиксированный приоритет".
РгР обычно
загружается после установки РгА и РгЦ и сбрасывается подачей сигнала Уст.
Разряды 0...3
РгР разрешают работу соответствующего канала. Разряды 4...7 обеспечивают
соответствующий режим работы БИС. Так, при записи "1" в разряд 4 РгР
приоритет каждого канала изменяется.
Обслуженный
канал будет иметь самый низкий приоритет. Порядок обслуживания каналов
установливается в соответствии с их номерами 0>>1>2>3>0. Если
разряд 4 РгР установлен в "0", то каждый канал будет иметь
фиксированный приоритет. Так, канал 0 имеет наивысший приоритет, а канал 3 -
самый низкий. При записи "1" в разряд 5 РгР устанавливается режим
"Удлиненная запись". В этом режиме продолжительность сигналов ЗпП и
Зп В/В увеличивается при отсутствии сигнала готовности внешнего устройства. При
этом БИС входит в состояние ожидания.
При записи
"1" в разряд 6 РгР устанавливается режим "Конец счета -
стоп". В этом случае после появления сигнала КС обслуженный канал окажется
запрещенным. Если необходимо продолжить обслуживание данного канала,
перепрограммируют его разряд разрешения. При "0" в разряде РгР
появление сигнала КС не запрещает повторное обслуживание канала.
При
"1" в разряде 7 РгР устанавливается режим "Автозагрузка",
позволяющий каналу 2 повторно пропустить массив данных или связать ряд массивов
без программного вмешательства.
Регистры
канала 3 хранят информацию для переустановки регистров канала 2. После передачи
первого массива и появления сигнала К.С содержимое регистров канала 3
передается в соответствующие регистры канала 2. Каждый раз, когда в регистрах
канала 2 происходит "подмена" данных информацией регистров канала 3,
устанавливается разряд "Флаг обновления данных" в регистре состояния
каналов.
Регистр
состояния каналов РгС указывает номер канала, который достиг конца счета. Кроме
того, в РгС входит разряд "Флаг обновления данных", описанный выше.
В процессе
функционирования в составе микропроцессорной системы микросхема может
находиться в одном из следующих состояний: исходном, программирования,
ожидания, обслуживания.
В исходное
состояние микросхему переводит внешний сигнал Уст. В этом состоянии маскируются
все запросы каналов ПД, а буферы А0...А3 переводятся в состояние приема
информации. В состоянии программирования МП имеет доступ к внутренним регистрам
выбранного канала в соответствии с табл. 2 и 3.
В состоянии
ожидания микросхема находится либо от момента окончания программирования до
выдачи сигнала ППД, либо в промежутках между циклами ПД.
После
получения от МП сигнала ПЗхв при наличии сигнала запроса микросхема
вырабатывает сигнал ППД и переходит в состояние обслуживания, в котором
системные шины находятся под управлением БИС ПДП.
Таблица 2.
Адресация регистров
0 0
0 0 Зп Канал 0,
начальный адрес
0 0
0 1 Зп Канал 0,
количество циклов
0 0
1 0 Зп Канал 1,
начальный адрес
0 0
1 1 Зп Канал 1,
количество циклов
0 1
0 0 Чт Канал 2,
начальный адрес
0 1
0 1 Зп Канал 2,
количество циклов
0 1
1 0 Чт Канал 3,
начальный адрес
0 1
1 1 Зп Канал 3,
количество циклов
1 0
0 0 Чт Чтение РгС
1 0
0 0 Зп Запись в
РгР
Последовательность
программирования контроллера
Для начала
следует запрограммировать РгА и РгЦ выбранного канала (или выбранных каналов).
Таблица 3.
Последовательность записи регистров адреса и циклов
|
A3
|
A2
|
A1
|
A0
|
Операция
|
Регистр
|
|
0
|
Номер канала
|
0
|
Зп
|
Запись младшего байта
начального адреса (A0...A7)
|
|
0
|
|
0
|
Зп
|
Запись старшего байта
начального адреса (A8...A15)
|
|
0
|
|
1
|
Зп
|
Запись младшего байта
количества циклов (C0...C7)
|
|
0
|
|
1
|
Зп
|
Запись старших шести
бит количества циклов (C8...C13) плюс два бита вида обмена данными (C14, C15)
|
Запись в
каждый регистр проводится в два этапа - младший, затем старший байт адреса.
Таблица 4.
Вид обмена данными
C14 C15
Вид обмена
0 0
Цикл проверки ПД
0 1
Цикл записи ПД
1 0
Цикл чтения ПД
1 1
Запрещенная комбинация
Разрешить
работу контроллера ПДП теперь можно, установив в РгР соответствующий бит
разрешения каналов вместе с атрибутами режима работы контроллера.
Таблица 5.
Формат регистра режимов
|
Ст. б.
|
|
Мл.б.
|
|
7
|
6
|
5
|
4
|
3
|
2
|
1
|
0
|
|
Установка автозагрузки
|
Установка КС-Стоп
|
Установка удлиненной
записи
|
Установка циклического
сдвига приоритета
|
Разрешение ПД
|
|
|
|
|
Для канала 3
|
Для канала 2
|
Для канала 1
|
Для канала 0
|
В процессе
работы можно контролировать выполнение процесса прямого доступа к памяти
посредством периодического чтения РгС.
Таблица 6.
Формат регистра статуса
|
Ст.б.
|
|
Мл.б.
|
|
7
|
6
|
4
|
3
|
2
|
1
|
0
|
|
0
|
0
|
0
|
Флаг обновления данных
|
КС-стоп
|
|
|
|
|
Для канала 3
|
Для канала 2
|
Для канала 1
|
Для канала 0
|
Пример
программирования
В одноплатном
компьютере "Радио-86РК", описанном в журнале "Радио",
контроллер ПДП используется для передачи кодов отображаемых символов из
экранной области памяти в контроллер дисплея. Данная задача требует
программирования контроллера ПДП с автозагрузкой (табл. 7).
Таблица 7.
Пример программирования контроллера ПДП
|
A3
|
A2
|
A1
|
A0
|
Операция
|
Данные
|
Комментарий
|
|
1
|
0
|
0
|
0
|
Зп
|
10000000 (80H)
|
В РгР установили флаг
автозагрузки, чтобы начальный адрес записался в регистр адреса третьего
канала
|
|
0
|
1
|
0
|
0
|
Зп
|
11010000 (D0H)
|
Младший байт адреса
|
|
0
|
1
|
0
|
0
|
Зп
|
01110110 (76H)
|
Старший байт адреса
|
|
0
|
1
|
0
|
1
|
Зп
|
00100011 (23H)
|
Младший байт количества
циклов
|
|
0
|
1
|
0
|
1
|
Зп
|
01001001 (49H)
|
Старший байт количества
циклов (09H) и вид обмена - чтение
|
|
1
|
0
|
0
|
0
|
Зп
|
10100100 (A4H)
|
В РгР установили флаги:
автозагрузка, удлиненная запись, разрешение работы канала 2
|
Все. Теперь
контроллер ПДП циклически пересылает область памяти 76D0H-7FF3H в контроллер
дисплея, приостанавливая на это время работу процессора.
Отметим, что
в таком варианте использования контроллера ПДП не требуется проводить операций
чтения. Это использовали разработчики компьютера "Радио-86РК",
совместив в адресном пространстве контроллер ПДП (только запись) и ПЗУ (только
чтение).
1 http://dfe3300.karelia.ru